
雷达车调平系统在风载荷作用下的滑移现象定性分析
2016-07-01 08:43:39庄文许
雷达与对抗 2016年2期
庄文许,周 泓
(中国船舶重工集团公司第七二四研究所,南京 211153)
雷达车调平系统在风载荷作用下的滑移现象定性分析
庄文许,周泓
(中国船舶重工集团公司第七二四研究所,南京 211153)
摘要:针对雷达车调平系统支撑腿在设计风载荷作用下支腿发生滑移的现象,进行了支撑稳定性分析,基于结构弹性力学提出了一种蠕动滑移现象,并证明了该现象发生的机理。得出的结论表明,增加地面与支撑腿之间的摩擦力、增加雷达车底盘刚度、适当降低支撑腿刚度有利于提高雷达车在风载荷作用下的支撑稳定性。为调平系统的支撑稳定性设计提供了理论依据。
关键词:雷达车;调平系统;滑移;蠕动;支撑稳定性
0引言
雷达车调平系统的稳定性是影响雷达系统工作性能的重要因素。稳定性包括两个方面:(1)控制系统的稳定性;(2)结构稳定性,即在外载荷(如风载荷、天线旋转惯性力)作用下,调平系统结构具有足够的刚度,但与地面不能发生相对滑移。
在结构稳定性分析中,文献[1]进行风载荷作用下的抗倾覆分析,计算设备各组成部分所受的力和力矩,利用力、力矩平衡校核调平系统的抗倾覆和抗滑移性能。文献[2-3]针对液压调平系统,对支撑腿支撑力和平台水平姿态采用双闭环控制,获得了快速平稳的调平效果,且避免了“虚腿”,有利于提高调平系统支撑的稳定性和抗风载荷能力。
在设计过程中,雷达车一般按照文献[1]的方法进行稳定性校核。但是,一些车载雷达在工作过程中,当风载荷较大时其支撑腿发生在地面小距离滑移的现象,与设计校核结果不一致。本文针对该问题提出一种滑移现象并分析了其发生的机理,为调平系统的支撑稳定性设计提供新的理论依据。
1问题描述
一类雷达车工作时由4个调平支腿将整车抬离地面并调平。在设计过程中进行了一种风载荷的稳定性校核,即靠自身重力抵抗风载作用导致倾覆、平移或转动(本文称这种滑移现象叫大滑移)的稳定性[1],且具有足够的稳定安全系数。但实际使用中,某些雷达车在设计风载荷极限条件下连续工作一段时间后,支腿在地面发生了一定距离的移动,影响了雷达系统的工作性能。
针对该问题,本文从结构弹性力学角度分析了该问题,提出一种滑移现象并分析了该滑移现象过程的机理,最后给出了解决该类问题的参考结论。
2计算分析
2.1建模
定义:车载雷达工作时由调平系统将整车抬离地面,雷达车底盘和调平支腿支撑在地面上后具有一定的弹性变形,再施加一定的外部载荷后变形量将发生变化,导致支撑腿与地面发生相对小滑动。这种小滑动在动载荷作用下是随机且随时间累积的,最终将表现为明显的滑移现象,本文称为蠕动滑移。
四腿调平系统的4个支腿成矩形分布,通常沿矩形边长一个方向的距离较大于另一个方向的距离。本文对蠕动滑移的机理进行定性的分析,因此可以简化成平面两支腿单跨钢架结构模型进行分析(见图1)。假设重心位于钢架中心B点,且为集中力,用G表示;将两个支腿依次编号为1和2,h为支腿长度;L为未变形时两支腿与地面支点距离,等于钢架跨距;L1为施加集中作用重力及其他外载荷后,两支腿与地面支点距离;Fwv为集中风载荷沿-y轴方向的分力,Fwh为集中风载荷沿-x轴方向的分力;Hw为风载荷作用点
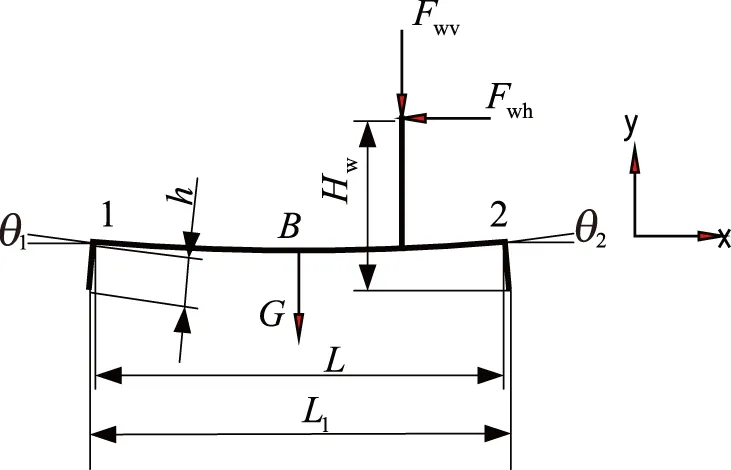
图1 两支腿单跨钢架结构模型
距离地面的高度;θ1、θ2为横梁端部与水平面的夹角;材料的弹性模量用E表示,梁截面的轴惯性矩用I表示。忽略横梁由于变形导致的沿x轴的长度变化。
2.2计算分析
2.2.1柔性梁与刚性支腿模型计算
先分析一种理想情况:梁是柔体,支腿为刚体,支腿与地面的摩擦力极小以致可以忽略。
(1) 当风载荷Fwv=0、Fwh=0时,用F1和F2表示支腿1和支腿2的支撑力,则有
进而有
(1)
式中,k为与横梁尺寸有关的常量[4]。图中尺寸变量满足
(2)
(2) 当Fwv≠0、Fwh≠0时,用△F1h和△F2h表示支腿1和支腿2支撑力由Fwh≠0作用而产生的变化值,则有
(3)
式中,△F1h和△F2h符号相反。用△F1v和△F2v表示支腿1和支腿2支撑力由Fwv≠0作用而产生的变化值,则有
(4)
假设△F1h为正,则图中尺寸满足
当支腿抬离地面后,不失一般性假设在支腿2处有一支撑力将其抬离地面,则有θ2=kG/2+k△F2v。因此有
(5)
式(5)减去式(2)得
(6)
由式(6)得出如下结论:
(1) 调平后,在支腿受力均匀的情况下,风载荷沿y轴的变化将导致蠕动滑移。
(2) 调平后,如果受力极不均匀或已经产生虚腿,风载荷沿y轴的变化将导致蠕动滑移,同时风载荷沿x轴的变化也将导致蠕动滑移,增加了蠕动滑移的强度。
然而,实际雷达车系统中,地面与支腿间存在摩擦力,调平系统是存在装配间隙的,支撑腿存在一定的柔性。如果装配间隙和支撑腿的柔性变形能够抵消式(6),则不会产生蠕动滑移。这将在下一节中进行分析证明。
2.2.2柔性梁与柔性支腿模型计算
模型同2.1节。假设一种中间平衡状态,当风载荷Fwv=0、Fwh=0时,如图2所示。图2(a)为平衡状态示意图,横梁处于弯曲状态,地面支撑力和摩擦力使得支腿处于受压缩状态,支腿上无弯矩。图2(b)为支腿1的受力图,图2(c)为支腿2的受力图。

(a)平衡状态 (b)支腿1与地面接触力 (c)支腿2与地面接触力
各变量含义同2.2.1节的定义和计算,当Fwv≠0、Fwh≠0时,图2(b)和(c)中,
(7)
先假设摩擦系数μ=0,并忽略支腿与横梁连接处弯矩对梁的变形影响,则有
(8)
用L1vh表示受风载荷后两个支腿与地面接触点的距离,有
同2.2.1节,化简得
(9)
用△L1vh表示受风载荷后两只支腿与地面接触距离的变化值,用式(9)减去式(2)得
(10)
分析式(10),可得出如下结论:
(1) 当支腿未脱离地面时,支腿与地面接触的摩擦力将引起支腿的弯曲变形。如果两个支腿的弯曲变形挠度之和需等于△L1vh就能避免蠕动滑移,因此需要优化出较大的地面摩擦系数和较小的支腿完全刚度。
(2) 当支腿脱离地面后,在同样的风载荷下,△L1vh增大,同时只有一条腿着地,需靠一条腿与地面的接触摩擦力导致的弯曲变形挠度来抵消△L1vh的变化,增加了难度。
综上所述,风载荷可能导致调平系统在发生整体倾覆或者滑移前发生蠕动滑移。如果支腿的变形量能够抵消风载荷导致的变形量,则可以有效避免蠕动滑移。消除支撑“虚腿”,优化支撑力分布,可有效提高调平系统的抗蠕动滑移性能。
3结束语
本文针对某雷达车在风载荷作用下的滑移现象进行了分析,提出一种蠕动滑移现象并分析了其发生的机理,根据理论推导过程得出了提高雷达车调平系统支撑稳定性的方法;进行了简化的定性分析,复杂的定量分析及应用留待下一步工作研究。本文的主要结论如下:
(1) 雷达车调平系统在风载荷作用下除了发生整体倾覆、滑移外还可能发生蠕动滑移,在设计过程中需予以考虑。
(2) 雷达车调平系统的蠕动滑移通常发生在整体倾覆、滑移之前,提高支腿与地面的摩擦力、提高雷达车底盘刚度、适当降低调平支腿的刚度和优化支撑力分布均匀性,都有利于提高雷达车的抗蠕动滑移性能。
参考文献:
[1]冯大成.某米波雷达天线车液压起竖及调平系统的设计与研究[D].北京: 北方工业大学硕士论文,2010.
[2]万其.雷达载车双闭环调平系统设计[C].中国电子学会电子机械工程分会2007年机械电子学学术会议论文集,2007.
[3]凌轩.雷达天线车自动调平系统设计[J].液压与气动,2008(4):1-4.
[4]刘鸿文.材料力学[M].北京: 高等教育出版社,2011:22-25.
Qualitative analysis of a sliding phenomenon for leveling system of radar vehicle under wind load
ZHUANG Wen-xu, ZHOU Hong
(No.724 Research Institute of CSIC, Nanjing 211153)
Abstract:In view of a phenomenon that the supporting legs of the leveling system of the radar vehicle may slide under the designed wind load, the supporting stability of the leveling system is analyzed. Based on the structural and elastic mechanics, a sliding phenomenon named wriggling is proposed and the mechanism of this phenomenon is also proved. The results indicate that the supporting stability of the radar vehicle can be improved by increasing the friction between the ground and the legs, increasing the stiffness of the chassis of the radar vehicle and reducing the rigidity of the supporting legs properly under the wind load, which can provide a theoretical basis for the supporting stability design of the leveling system.
Keywords:radar vehicle; leveling system; sliding; wriggling; supporting stability
收稿日期:2016-01-20;修回日期:2016-02-29
作者简介:庄文许(1985-),男,高级工程师,博士,研究方向:机电系统设计;周泓(1970-),女,工程师,研究方向:机电一体化设计。
中图分类号:TN957.8
文献标志码:A
文章编号:1009-0401(2016)02-0046-04
