家用服务机器人综述
2016-06-30 06:05梁荣健张涛王学谦清华大学自动化系北京100084
智慧健康 2016年2期
梁荣健,张涛,王学谦(清华大学 自动化系,北京 100084)
家用服务机器人综述
梁荣健,张涛,王学谦
(清华大学 自动化系,北京 100084)
摘要:近二十年来,家用服务机器人技术逐渐成为一个国际范围内的研究热点。本文对家用服务机器人的发展历程、分类、关键技术和发展趋势进行了梳理和总结,提供了一份较全面的综述。首先,介绍了家用服务机器人在各国的发展历程以及全球研发现状和市场规模。然后,从不同的角度对家用服务机器人进行了分类并介绍了各类型中的典型例子。进而分析了家用服务机器人的重要特点和关键技术。最后,总结了家用服务机器人的发展趋势。
关键词:家用服务机器人;发展历程;分类;关键技术;发展趋势
0 引言
随着机器人技术的发展,机器人的应用范围已经不仅仅局限在工业领域,在军事、医疗、公共服务、家庭劳务等领域也随处可见机器人的身影。家用服务机器人有着潜力巨大的需求,近二十年来,家用服务机器人技术逐渐成为一个国际范围内的研究热点。国内外的研究机构都在争相研发各种类型的家用服务机器人,并且已经推出了一些商业化的产品,如著名的NAO机器人[1]和iRobot公司的Roomba清洁机器人[2]等。机器人已经不仅仅局限于实验性的科学研究,而是渐渐走向实用化,进入人们的日常生活。比尔·盖茨在2007年曾撰文预计机器人将像个人电脑一样会走入千家万户[3]。工业机器人之父约瑟夫·恩格尔伯格也认为家用服务机器人拥有潜力巨大的市场[4]。机器人进入家庭领域已是一种必然趋势。
1 发展历程
家用服务机器人起步较晚,一直到1999年宠物机器人爱宝的推出[5],才标志着家用服务机器人第一次大规模地在商业市场中亮相。然而,二十一世纪以来,家用服务机器人的研发迅速成为一个热点,具有巨大潜在市场的家庭、个人服务机器人产业也逐渐发展壮大起来。不同国家对家用服务机器人的研发重点不一样,发展历程也不一样。
1.1日本
日本是最早进行家用服务机器人研发的国家之一,并制定了一系列推动家用服务机器人产业化发展的政策。日本在上世纪80年代就将“研发能在生活中与人类进行友好交互的机器人”作为具有重要社会意义的课题写入国家层面的发展规划当中[6]。其经济产业省为家用服务机器人科技发展做了详尽的战略规划,计划以仿人娱乐机器人为突破口,采用模块化和标准化道路,推进家用服务机器人的产业化[7]。
仿生、拟人,是日本家用服务机器人发展的一大特色[6]。1999年Sony公司推出会走、会判断环境、会与人交流的机器宠物狗爱宝。2007 年,东京早稻田大学与 20多个公司合作、花费十几年研制成功仿人机器人“Twendy-One”[8],如图1所示。“Twendy-One”极其灵巧,能实现从烤箱取面包,端盘子等操作。日本东京大学和丰田汽车公司等机构联合开发出家务帮手机器人“AR”(Assistant Robot)[9],如图2所示。AR接近人类体型,能根据褶皱区分衣物,会使用洗衣机、送餐、拖地,能帮助减轻家务负担。2014年,日本软银集团和法国Aldebaran Robotics联合推出全球首款配备情感识别功能的机器人Pepper[10],如图3所示。Pepper配备了语音识别技术以及基于表情和声调的情绪识别技术,并可以通过灵活的肢体语言可与人进行交流。 2015年6月-8月,Pepper正式面向普通顾客发售。
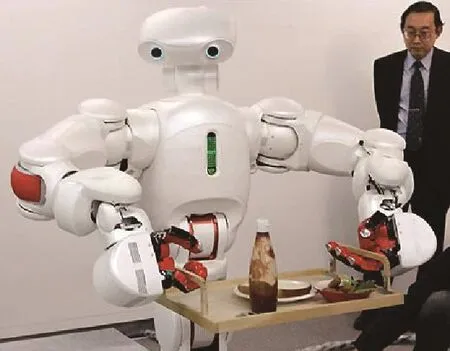
图1 Twendy-one 机器人

图2 AR机器人

图3 Pepper机器人
1.2美国
美国家用服务机器人发展起步早,是在服务机器人产业化方面做得最好的国家[11]。美国把家用服务机器人定位为解决老龄化、医保等重大社会问题的突破口,认为家用服务机器人将渗透到我们的生活当中,深刻改变人类社会的形态。
专用化[6]、产业化是美国家用服务机器人发展的一大特色。2002年,iRobot公司推出了家用清洁机器人Roomba,如图4所示。Roomba虽然功能单一,但是其以相对低廉的价格提供了相当实用的功能,实现了成本与功能之间一个较好的平衡,因此赢得了消费者的喜爱:至2014年Roomba 系列产品的销售量已经超过了1000万台[6]。图5所示的ROVIO[12]是由美国WOWWEE公司开发的一款安保机器人。ROVIO有两项基本功能:通过内置摄像机观看机器人周围环境并进行互动;通过Wifi控制对ROVIO进行远程遥控。

图4 Roomba机器人

图5 ROVIO机器人
建立统一标准[13]、推进家用服务机器人设计生产的模块化和平台统一化将有利于家用服务机器人的产业化发展[14]。一些反应敏捷的IT巨头看到了蕴含的巨大商机,如微软和谷歌公司凭借各自在IT技术上的雄厚实力,分别推出了机器人操作系统 Robotics Studio和ROS,并占据了相当高的市场份额。
1.3韩国
韩国把智慧型服务机器人产业定位为21世纪推动国家经济快速增长的十大引擎产业之一,把智慧型服务型的机器人产业作为“839”战略计划重要组成部分[15],希望通过开创新市场实现成为世界三大机器人强国目标[11]。2009年韩国知识经济部发布了《服务型机器人产业发展战略》,计划通过该战略让韩国机器人在世界机器人市场占有率从2009年的10%跃升到2018年的20%。
韩国机器人发展突出了服务机器人与网络相结合。2004年,韩国SK电信推出保安机器人Mostitech[7],如图6所示。该机器人能够在家庭的房间里走动,如果检测到失火、煤气泄露或者有不速之客进入家中等紧急情况,机器人会拍下室内照片并把相关信息发送到指定的手机用户,收到信息的用户还可以通过手机和互联网命令机器人对可疑的情况或者人进行调查。韩国Yujin Robotics公司推出iRobi[7]机器人,如图7所示。当家长外出时,通过跟网络连接iRobi,家长可以借助机器人上摄像头监看孩子们的活动,还可以通过显示屏跟孩子们进行交流。另外,iRobi还会念书和唱歌,因此也是教育孩子的新媒介。

图6 Mostitech机器人

图7 iRobi机器人
1.4中国
与日美等国家相比,中国在家用服务机器人领域的研发起步较晚。但是近年来,为了迅速缩小与发达国家的技术差距,抢占新兴服务机器人市场,中国制定了一系列有利于发展智能服务机器人的政策。2006年发布的《国家中长期科学和技术发展规划纲要(2006-2020年)》中,智能服务机器人被定位为重点发展的前沿技术和新的经济增长点。2012年,中国出台《智能制造科技发展“十二五”专项规划》和《服务机器人科技发展“十二五”专项规划》,发展智能服务机器人被写入国家发展战略[16,17]。
在政策利好和市场潜力巨大的背景下,中国的家用服务机器人产业开始萌发,并涌现了一些具有竞争力的公司,如全球领先的家用服务机器人企业科沃斯。2013年,科沃斯推出了“地宝九系”智能扫地机器人[18],如图8所示。“地宝九系”功能上跟美国iRobot公司的Roomba清洁机器人相近,但价格更加低廉。此外,科沃斯还推出了可以实时监测室内的空气质量和烟雾的浓度“家宝”系列机器人,和集远程控制、娱乐、教育、安保等功能于一身的“亲宝”系列机器人。目前,科沃斯公司的产品已成功出口到全球三十多个国家和地区,成为中国家用服务机器人企业走向世界的先驱。

图8 “地宝九系”扫地机器人
1.5全球家用机器人研发现状与市场规模
根据IFR(International Federation of Robotics)[19]统计数据,在2014年,全球市场共销售470万台个人/家用服务机器人,比2013年增长28%,总销售额高达22亿美元。IFR 预计,在2015-2018年期间,个人/家用服务机器人的销售额将会达到3500万台。目前应用较广泛的家用服务机器人为清洁机器人和割草机器人。但IFR 预计,随着机器人技术的发展,用于看护、陪伴、娱乐、多功能家务的拟人化智能家用机器人的市场份额将会逐渐提升。
家用服务机器人的迅猛发展与科技创新是密不可分的。中国科技部[20]对德温特创新索引(DII)专利数据库进行家用服务机器人相关的检索并对结果进行分析。截止于2010年5月,共检索到与家用服务机器人研究相关的专利4839件,专利数量随年度变化的情况如图9所示。从图中可以看出,近20年来,家用服务机器人专利申请数量持续高速增长(因为专利的公开和授权存在一定的滞后期,所以近3年数据仅供参考),这表明家用服务机器人相关技术受到越来越多关注,研发热度持续上升。
该机构还对家用服务机器人专利技术的国家/地区分布进行了分析。结果表明,在专利受理数量上,日本和韩国占有绝对优势,日本受理的专利数量最多,约占总量的42.5%,韩国约占总量的30%。其次是美国、中国和德国,各占总量的11%、7.3%和4%。家用服务机器人专利申请数量居前10位的申请人为三星、LG、丰田、松下、应用材料公司等韩、日、美大型企业。这说明,家用服务机器人的研发在日本、韩国、美国、中国、德国最为活跃,日、韩、美三国在引领着家用服务机器人技术的发展。

图9 家用服务机器人年度专利申请趋势
2 分类与典型例子
IFR按照从事的工作类型,把机器人分为工业机器人与服务机器人两大类[17]。家用服务机器人是服务机器人中的重要一类,指可以在家庭中为用户提供服务的机器人。可以从不同的角度对家用服务机器人进行进一步的分类,如表1总结所示。

表1 家用机器人的分类
3 重要特点与关键技术
3.1重要特点
家用服务机器人由于其工作场合、服务对象、从事任务的特殊性,其设计要求相对其他机器人有很多不同。
3.1.1工作在复杂的、半结构化或者非结构化的环境
家用服务机器人的工作场所——家庭,是一个比较复杂的环境,里面有各种家具、楼梯和台阶、狭长的走廊、移动的人类与宠物,甚至还有火炉等一些危险物品。与工业机器人往往工作在结构化的环境不同,家用服务机器人往往是工作在复杂的半结构化或者非结构化的环境[24]中。工作环境的复杂多变一方面对机器人的移动机构设计提出了严峻的挑战,另一方面也使得家用机器人的自主导航定位面临许多困难。
3.1.2长时间与人共处,服务对象大多未经过训练
家用服务机器人是为家庭和个人服务的机器人,往往跟长时间人类在同一个空间进行工作,工作过程中与人类有着密切的交互。而且不同于工业机器人往往由专门的操作员进行操作,家用服务机器人是由极平常的普通人,甚至是老人和病人来操作的[25]。因此家用服务机器人应具有自然、容易掌握、高效的人机交互界面。良好的人机交互一方面有助于机器人理解和执行用户的指令;另一方面,通过交互式学习[26]等方式,让用户参与到机器人的训练和学习环节,能促进人的智能与机器人智能的有机融合,大大延伸了机器人的服务能力。同时,为了保障人类的安全,家用服务机器人需要采用十分可靠的安全技术[27,28]。
3.1.3往往需要跟多种对象进行交互
一项服务任务往往包括多个步骤,不同步骤里往往需要家用服务机器人跟不同的对象进行交互。而且为了扩大服务范围以及实现自我维护,家用服务机器人可能还需要跟门把手、读卡器、电源开关等对象进行交互。因此,家用服务机器人需要较强的物体识别与操作能力。
3.2关键技术
3.2.1室内自主导航技术
实现在室内环境中的自主导航,是大部分家用服务机器人最基本的能力之一。室内移动机器人的自主导航通常涉及到三方面的问题:地图表示与创建、自主定位和路径规划。
(a)地图表示与创建
按照是使用绝对坐标系还是抽象出来的拓扑关系来描述环境特征,可以将机器人地图的表示方法分为三大类:度量表示、拓扑表示以及混合表示[29]。度量表示法使用绝对坐标系来描述环境特征,其又可以进一步分为栅格法[30]和几何表示法[31]等。拓扑表示法[32]使用抽象出来的拓扑关系来描述环境特征,将环境表示为一系列节点以及连接节点的边。每个节点对应于环境中一个特征位置或区域,而连接节点的边表示相应位置间的连通关系。混合表示法将度量表示和拓扑表示相结合。如可采用二级分层结构[33],第一层为使用拓扑表示法的全局地图,第二层为使用度量表示的以拓扑节点为核心的局部地图,这样既发挥了拓扑表示法简洁、有利于维护全局地图一致性的优点,又发挥了度量表示法容易实现局部精确定位的优势。
(b)自主定位
定位是指通过融合先验环境信息、机器人位姿的当前估计和传感器测量值等信息,来获取更准确的对机器人当前位姿的估计[34]。家用服务机器人的定位方法,可分为相对定位和绝对定位[35]。相对定位是指以初始位置为先验条件,在行进的过程中根据每一步的运动状态确定当前家用服务机器人在局部环境中的位置。绝对定位也可以称为全局定位,指根据预先确定好的环境地图或者传感器信息获取机器人在全局坐标系中位姿。
定位和地图创建这两个问题具有高度的相互依赖性,被人们形象地比喻成“鸡和蛋”的问题:机器人的定位需要依赖准确的环境地图,而为了创建地图机器人又要实现准确的定位。SLAM(Simultaneous Localization and Mapping)[36]技术,顾名思义,试图同时考虑机器人的定位和地图创建问题。SLAM指机器人从未知位置出发,在运动的过程中利用自身定位信息估计观测到的环境路标位置,建立环境地图,然后利用已经建立的地图来校正机器人的定位[37]。它的基本原理是基于概率统计的方法,通过多特征匹配来实现机器人定位与地图创建并减少误差。
(c)路径规划
传统的机器人路径规划算法研究的是从起始点运动到目标点的类型,期望输出是一条安全的在某种意义上最优或者较优的路径。常用的方法主要包括路线图法[38]、单元分解法[39]、势场法[40]、萤火虫算法[41]和遗传算法[42]等。家用服务机器人的许多应用场合需要该类型的路径规划。
传统的起始点-目标点型的路径规划并不适用于清扫地面、割草等任务。这些任务需要进行覆盖路径规划,即要求机器人必须通过环境中的每个不被障碍物占领的点,并且要避开障碍物和尽量避免重复遍历[43]。常用的覆盖算法有启发式算法、基于模板的方法、单元分解法等[44,45]。
3.2.2人机交互技术
强调与人的良好交互性是家用服务机器人的显著特征。为了实现自然、高效的人机交互,家用服务机器人的设计者引入了多种新型的人机交互方式。根据所采用的交互通道的不同,可以把目前应用到家用服务机器人上的人机交互方式分为四大类:基于视觉、基于听觉、基于力触觉以及其他,如表2总结所示。值得注意的是,家用服务机器人与用户之间的交互正呈现出多模化[46]的趋势,即机器人与用户同时利用多种而不是单一的交互通道进行交互,如pepper机器人可以根据用户的面部表情、肢体语言以及措辞来综合分析用户的情感。

表2 家用服务机器人中人机交互技术
针对家用服务机器人,控制方式已经不仅仅局限于近距离操控。随着基于GSM(Global System for Mobile Communications)/GPRS(General Packet Radio Service)网络的操控、基于WiFi无线网络的PC机操控、基于Internet的PC机操控、红外线操控等控制方式[57]的逐渐成熟和这些技术在家用机器人上的应用,用户可以在远距离与家中的机器人进行交互,这有利于家用服务机器人在我们生活中的普及。
3.2.3物体识别
为了完成服务任务,家用服务机器人需要识别的对象主要包括三类:服务对象(用户),操作对象(垃圾、碟子、水杯等)还有环境对象(墙、桌子等)[20]。这些对象往往具有相对固定的形状或者结构,因此基于模型的物体识别方法通常都行之有效,也是目前家用服务机器人物体识别技术中比较常用的方法。在基于模型的物体识别算法中,特征的提取和选择对识别结果有着至关重要的影响。传统的识别算法中,特征的选择往往是基于经验知识的。最近几年,有学者提出了深度学习[58]等自主特征提取算法。让机器人通过对海量样本进行学习来自主提取出有效的分类特征。结果表明这些新型特征提取算法在多个课题上都取得了让人惊喜的结果[59,60]。
为了识别物体,机器人需要获取跟识别对象相关的多方面信息。现在的家用服务机器人除了装备有相机外,还可能装有测距仪、红外传感器、声音传感器和力触觉传感器等多种类型的传感设备。通过对不同传感器采集的信息进行融合,能有效提高物体识别的鲁棒性和准确率。同时,借助于多种传感设备,机器人能更准确地获取操作对象的状态,这为机器人对物体的精细操作提供了条件。
4 发展趋势
基于对家用服务机器人发展历程和重要技术的分析,下面对家用服务机器人技术的发展趋势进行总结。
4.1人机交互多层次化、人性化
新一代家用服务机器人与用户之间的交互,呈现出多层次化的趋势。用户可以给机器人下达相对高层的指令,甚至机器人可以自动检测到用户的需求。用户也可以给机器人下达相对底层的指令,或者让机器人完全跟随用户的动作。用户可以跟机器人进行近距离的交流,也可以通过互联网等信息传输技术实现远程交互。用户跟家用服务机器人的交互将会越来越人性化,用户可以通过语音、手势等自然、直观的方式与机器人进行交互,机器人对用户的反馈也将更多元化。
4.2与环境的交互智能化
新一代的家用服务机器人将会配备更多样、先进的传感设备,以实现对环境中物体更鲁棒性的识别和对环境状态更精确的判断。家用服务机器人将可以对环境中物体进行更精细的操作,从而为用户提供更多的服务。
机器人进入家庭,不仅仅只是机器人本身的发展,家庭环境同样也在不断完善。通过对环境进行一些智能化改造,能强化其环境中机器人的功能[61]。在未来,家用服务机器人与家庭环境将会形成一个紧密的有机智能体。
4.3资源利用网络化
互联网与机器人相结合,是家用服务机器人一个重要的发展方向[11]。互联网相当于一个巨大的资源库,包含了大量的计算资源和信息资源,跟网络相结合的机器人则是一种有效利用这些资源的工具和手段。家用服务机器人作为一个智能终端和操作载体,本身具备移动、感知、决策和操作功能。互联网平台借助云计算、大数据、物联网等技术,能为机器人提供一个潜力巨大的信息收集和处理平台。跟互联网相结合,能在很大程度上延伸了家用服务机器人的感知、决策和操作能力。
4.4设计与生产标准化、模块化、体系化
建立广泛认可的家用服务机器人标准,设计并构建家用服务机器人模块化体系结构[62],已成为发展家用服务机器人亟需解决的课题。推进家用服务机器人设计生产的标准化、模块化和体系化,有利于减少重复性劳动,加快先进技术转化为产品的进程,提高产品质量,降低成本,推动家用服务机器人的产业化发展。
5 结论
得益于机器人技术的发展以及潜力巨大的消费市场,家用服务机器人逐渐成为一个国际范围内的研究热点并开始走向实用化,进入人们的日常生活。文中从家用机器人的发展历程、分类、关键技术和发展趋势等角度对家用服务机器人技术进行梳理和总结,这对希望了解家用机器人技术的研究人员有一定的参考价值。
参考文献
[1]Aldebaran Robotics .Robots.NAO.https://www.aldebaran.com/zh/ji-qi-ren-nao-shi-shui
[2]Jones J L.Robots at the tipping point:the road to iRobot Roomba[J].Robotics & Automation Magazine,IEEE,2006,13(1):76-78.
[3]Gates B.A robot in every home[J].Scientific American,2007,296(1):58-65.
[4]王俊玲,王铸.机器人之父瞄准家用服务机器人市场[J].机器人技术与应用,1999,5:005.
[5]博言.数字化时代的宠物——索尼智能机器狗 Aibo[J].电子世界,2004(2):9-10.
[6]沈应龙.国际服务机器人产业的趋势与未来[J].世界科学,2014,8:009.
[7]王田苗,陶永,陈阳.服务机器人技术研究现状与发展趋势[J].中国科学:信息科学,2012,42(9):1049-1066.
[8]Iwata H,Sugano S.Design of human symbiotic robot TWENDY-ONE[C]//Robotics and Automation,2009.ICRA'09.IEEE International Conference on.IEEE,2009:580-586.
[9]The University of Tokyo.Assistant Robot AR.http://www.jsk.t.utokyo.ac.jp/research/irt/ar.html
[10]Aldebaran Robotics .Robots.Pepper.https://www.aldebaran.com/zh/ji-qi-ren
[11]宋章军.服务机器人的研究现状与发展趋势[J][J].集成技术,2012,1(3):1-9.
[12]WOWWEE.Rovio.http://www.wowwee.com/en/products/tech/telepresence/rovio/rovio
[13]赵爽,吴蒙,陈文龙.国内外家庭服务机器人标准研究[J].家电科技,2014(1).
[14]张苹.服务机器人产业标准化问题探究[J].机器人技术与应用,2009(1):11-16.
[15]李良琦,麦军.韩国机器人产业政策研究[J].机器人技术与应用,2009(6):6-9.
[16]张琨.“云物”时代的家用机器人[J].高科技与产业化,2013,10:032.
[17]徐方,张希伟,杜振军.我国家庭服务机器人产业发展现状调研报告[J].机器人技术与应用,2009(2):14-19.
[18]科沃斯地宝九系.http://www.most.gov.cn/dfkj/js/zxdt/201311/t20131111_110266.htm
[19]International Federation of Robotics .Service Robots.http://www.ifr.org/service-robots/
[20]艳涛 .机器人专利分析[J].机器人技术与应用,2011,01
[21]Sahin H,Guvenc L.Household robotics:autonomous devices for vacuuming and lawn mowing[Applications of control][J].IEEE Control Systems Magazine,2007,2(27):20-96.
[22]Xu Y,Qian H,Wu X.Household Service Robotics[M].Academic Press,2014.
[23]Jardón Huete A,Stoelen M F,Bonsignorio F,et al.Task-oriented kinematic design of a symmetric assistive climbing robot[J].2011.
[24]杨娜,李汉舟.服务机器人导航技术研究进展[J].机电工程,2015,12:024.
[25]Gross H M,Mueller S,Schroeter C,et al.Robot companion for domestic health assistance:Implementation,test and case study under everyday conditions in private apartments[C]//Intelligent Robots and Systems(IROS),2015 IEEE/RSJ International Conference on.IEEE,2015:5992-5999.
[26]Cao T,Li D,Maple C,et al.Human interaction based Robot Self-Learning approach for generic skill learning in domestic environment[C]//Robotics and Biomimetics(ROBIO),2013 IEEE International Conference on.IEEE,2013:203-208.
[27]Tadele T S,de Vries T,Stramigioli S.The Safety of Domestic Robotics:A Survey of Various Safety-Related Publications[J].Robotics & Automation Magazine,IEEE,2014,21(3):134-142.
[28]Wassink M,Stramigioli S.Towards a novel safety norm for domestic robotics[C]//Intelligent Robots and Systems,2007.IROS 2007.IEEE/RSJ International Conference on.IEEE,2007:3354-3359.
[29]庄严.移动机器人基于多传感器数据融合的定位及地图创建研究[D].大连理工大学,2004.
[30]朱磊,樊继壮,赵杰,等.基于栅格法的矿难搜索机器人全局路径规划与局部避障[J].中南大学学报:自然科学版,2011,42(11):3421-3428.
[31]刘亚杰,王航宇,谢君.狭窄环境中基于几何法的全局路径规划新方法[J].海军工程大学学报,2010,22(4):82-86.
[32]Beeson P,Jong N K,Kuipers B.Towards autonomous topological place detection using the extended voronoi graph[C]//Robotics and Automation,2005.ICRA 2005.Proceedings of the 2005 IEEE International Conference on.IEEE,2005:4373-4379.
[33]庄严,徐晓东,王伟.移动机器人几何-拓扑混合地图的构建及自定位研究[J].控制与决策,2005,20(7):815-822.
[34]胡劲草.室内自主式移动机器人定位方法研究[J].机电产品开发与创新,2007,19(5):28-30.
[35]张本法,孟祥萍,岳华.移动机器人定位方法概述[J].山东工业技术,2014(22):250-250.
[36]Thrun S,Leonard J J.Simultaneous localization and mapping[M]//Springer handbook of robotics.Springer Berlin Heidelberg,2008:871-889.
[37]李秀才,郑志强,张辉.SLAM 问题中机器人定位误差分析与控制[J][J].自动化学报,2008,34(3):323-330.
[38]许斯军,曹奇英.基于可视图的移动机器人路径规划[J].计算机应用与软件,2011,3(28):220r236.
[39]顾国昌,张巧荣.移动机器人分层路径规划方法研究[J].哈尔滨工程大学学报,2001,22(5):31-34.
[40]朱毅,张涛,宋靖雁.非完整移动机器人的人工势场法路径规划[J].控制理论与应用,2010,27(2):152-158.
[41]白永珍.基于参数方差调节萤火虫算法的三维路径规划 ①[J].计算机系统应用2015,24(5):92-99.
[42]Menasri R,Oulhadj H,Daachi B,et al.A genetic algorithm designed for robot trajectory planning[C]//Systems,Man and Cybernetics(SMC),2014 IEEE International Conference on.IEEE,2014:228-233.
[43]简毅,张月.移动机器人全局覆盖路径规划算法研究进展与展望[J].计算机应用,2014,34(10):2844-2849.
[44]De Carvalho R N,Vidal H A,Vieira P,et al.Complete coverage path planning and guidance for cleaning robots[C]//Industrial Electronics,1997.ISIE'97.,Proceedings of the IEEE International Symposium on.IEEE,1997,2:677-682.
[45]Itai A,Papadimitriou C H,Szwarcfiter J L.Hamilton paths in grid graphs[J].SIAM Journal on Computing,1982,11(4):676-686.
[46]Jaimes A,Sebe N.Multimodal human-computer interaction:A survey[J].Computer vision and image understanding,2007,108(1):116-134.
[47]Pisharady P K,Saerbeck M.A robust gesture detection and recognition algorithm for domestic robot interactions[C]//Control Automation Robotics & Vision(ICARCV),2014 13th International Conference on.IEEE,2014:775-780.
[48]B.Gonsior,S.Sosnowski,C.Mayer,J.Blume,B.Radig,D.Wollherr,K.Kuhnlenz,Improving aspects of
[49]empathy and subjective performance for HRI through mirroring facial expressions,in:IEEE RO-MAN,2011,pp.350e356.J.Sung,C.Ponce,B.Selman,A.Saxena,Human activity detection from RGBD images.Plan,Activity,and Intent Recognition,2011.
[50]Pineau J,Montemerlo M,Pollack M,et al.Towards robotic assistants in nursing homes:Challenges and results[J].Robotics and Autonomous Systems,2003,42(3):271-281.
[51]M.L.Walters,et al.,Evaluating the robot personality and verbal behavior of domestic robots using video-based studies,Adv.Robot.25(18)(2011)2233e2254.
[52]Cruz F,Twiefel J,Magg S,et al.Interactive reinforcement learning through speech guidance in a domestic scenario[C]//Neural Networks(IJCNN),2015 International Joint Conference on.IEEE,2015:1-8.
[53]Janvier M,Alameda-Pineda X,Girin L,et al.Sound representation and classification benchmark for domestic robots[J].arXiv preprint arXiv:1402.3689,2014.
[54]K.Kosuge,T.Hayashi,Y.Hirata,R.Tobiyama,Dance partner robot-MS DanceR,IEEE Intell.Robot.Syst.(IROS)4(2003)3459e3464T.
[55]Yoshikai,M.Hayashi,Y.Ishizaka,T.Sagisaka,M.Inaba,Behavior integration for whole-body closeinteractions by a humanoid with soft sensor flesh,in:7th IEEE-RAS International Conference onHumanoid Robots,2007,pp.109e114.
[56]Tschakarow R,Grigorescu S M,Gräser A.FRIEND-a dependable semiautonomous rehabilitation[C]//Robotics(ISR),2010 41st International Symposium on and 2010 6th German Conference on Robotics(ROBOTIK).VDE,2010:1-7.
[57]李强.智能家用机器人[J].科技信息,2013(22):273-274
[58]Kuang P,Cao W N,Wu Q.Preview on structures and algorithms of deep learning[C]//Wavelet Active Media Technology and Information Processing(ICCWAMTIP),2014 11th International Computer Conference on.IEEE,2014:176-179.
[59]W.Hu,Y.Qian,F.K.Soong,Y.Wang.Improved mispronunciation detection with deep neural network trained acoustic models and transfer learning based logistic regression classifiers[J].Speech Communication,2015,67:154-166.
[60]Fang H,Hu C.Recognizing human activity in smart home using deep learning algorithm[C]//Control Conference(CCC),2014 33rd Chinese.IEEE,2014:4716-4720
[61]Khaliq A A,Saffiotti A.Stigmergy at work:Planning and navigation for a service robot on an RFID floor[C]//Robotics and Automation(ICRA),2015 IEEE International Conference on.IEEE,2015:1085-1092.
[62]舒畅,熊蓉,傅周东.基于模块化设计方法的服务机器人结构设计[J].机电工程,2010,27(2):1-4.
A Review of Home Service Robot
LIANG Rong-jian,ZHANG Tao,WANG Xue-qian
(Department of Automation,Tsinghua University,Beijing 100084,China)
Abstract:In the past two decades,home service robot is becoming a hot spot worldwide.We try to provide a comprehensive review of home service robot by summarizing its development,classification,key technologies and development trends.At first,we introduce the development of home service robot in different countries and summarize the global research status of home service robot as well as its market scale.Then further classification of home service robot has been provided from different perspective.In the following,the important features and key technologies for home service robot have been analyzed.Finally,we provide a survey of the development trends of home service robot.
Keywords:Home service robot;Development history;Classification;Trends
猜你喜欢
今日畜牧兽医(2022年10期)2022-12-23
今日农业(2021年8期)2021-11-28
今日农业(2021年13期)2021-11-26
落叶果树(2021年6期)2021-02-12
中国市场(2016年36期)2016-10-19
出版广角(2016年15期)2016-10-18
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14