
疏水表面冷凝的毛细力微操作液滴动态分配
2016-06-28 01:18范增华荣伟彬王乐锋孙立宁
哈尔滨工业大学学报 2016年7期
范增华, 荣伟彬, 王乐锋, 孙立宁
(机器人技术与系统国家重点实验室(哈尔滨工业大学), 哈尔滨 150080)
疏水表面冷凝的毛细力微操作液滴动态分配
范增华, 荣伟彬, 王乐锋, 孙立宁
(机器人技术与系统国家重点实验室(哈尔滨工业大学), 哈尔滨 150080)
摘要:为实现毛细力操作液滴获取,提出基于疏水表面冷凝的毛细力微操作液滴分配方法,研究微对象转移进程中(拾取-释放)所需的操作液滴条件. 针对操作液滴分配任务,建立液桥拉伸进程中的模型. 基于VOF(volume of fluid)方法,建立平面-平面、平面-球面配置模式下的动态模型,分析操作液滴的动态获取过程. 仿真结果表明:接触角和提升速度均对辅助液滴的获取率和断裂距离起到重要作用,液滴趋向于接触角小的端面,提升速度可促使液滴在两平面均分. 液桥体积对辅助液滴获取率的影响较小,液桥断裂距离与液桥体积成正比变化. 实验研究了平面-平面、平面-球面配置下的操作液滴动态分配进程,验证了所提出方法的可行性.
关键词:微操作;毛细力;液滴;动态液桥;分配
可靠、无损、柔顺的微对象转移方法是微操作机器人的关键技术[1-4],基于操作液滴的毛细力微对象操作方法具有特有的柔顺性[5-8],能够避免微对象操纵中产生的表面应力集中,避免潜在的破坏和操作失效. 基于毛细力操作的微液滴获取方式可概括为3种:蘸取式[9],毛细管式[10]和浸润式. Obata等[11]提出利用操作探针分配后的液滴作为拾取介质,用于抓取微对象,并在待释放位置分配辅助液滴用于辅助释放,从理论角度证明了所提出方案的可行性. Wang等[12]利用毛细管末端产生的弯月面实现微对象的柔顺拾取和转移,需添加外源供液装置提供毛细管路液体,并通过外源压力调节毛细管末端弯月面的形态. Fuchiwaki等[13]通过将操作探针浸润在液体管道内,利用探针伸出管道后的末端残留液滴作为毛细力夹持的操作液滴条件,但只能被动地改变操作探针的尺寸和形状来获取所需操作液滴.
为实现操作液滴的分配,在前述疏水表面冷凝的毛细力柔顺拾取方法研究工作的基础上[14-15],本文提出基于疏水表面冷凝的毛细力微操作液滴分配方法. 确立毛细力操作液滴分配的实施方案,建立了操作液滴分配模型,并对分配过程进行VOF动态求解,分析影响操作液滴获取能力的因素. 最后通过实验验证所提出方法的可行性.
1疏水表面冷凝的毛细力操作液滴分配原理
毛细力操作液滴的分配在拾取阶段对应于操作探针上的拾取液滴,在基于液滴的辅助释放阶段则是指分配在基底上的辅助液滴. 疏水表面冷凝的毛细力操作液滴分配的基本原理如图1所示. 经过表面刻蚀和氟化处理的操作探针具有疏水功能,一方面有利于产生椭球形液滴;另一方面可保证初始分配液滴在微操作探针端面的稳定性[16],避免发生侧移.

(a)初始形成 (b)接触基底 (c)液桥拉伸 (d)分配完成
在制冷模块的作用下操作探针端面冷凝产生初始分配液滴,如图1(a)所示. 冷凝初始液滴形成后,操作探针下移直至与操作基底接触,并形成液桥,如图1(b)所示. 待液桥稳定后,操作探针以一定的速度提升,拉伸液桥,如图1(c)所示. 液桥继续拉伸,直至其断裂,此时可在操作探针和操作基底分配相应体积的操作液滴,如图1(d)所示. 操作基底上分配的液滴相对于分配前的冷凝液滴比为基底分配液滴的获取率. 该操作液滴的获取方式不需外源辅助装置,且可实现整个操作进程中微液滴的控制,保证了毛细力操纵中微液滴的获取需求.
2操作液滴分配模型
以曲率半径分别为R1和R2的操作基底和操作探针间的液桥为分析对象,研究基底辅助液滴的获取能力,图2为液桥断裂时的模型示意图.

图2 分配液桥断裂模型
液桥两端的极限位置坐标分别为(0,y1)和(x2,y2),断裂点的坐标为(xc,yc),断裂距离为s. 若操作基底和操作探针末端轮廓等效为球形,则左右两侧的体积v1、v2分别为
式中:h1、h2分别为液桥包围左右对象的球缺高度,Y1(x)、Y2(x)分别为左右液桥轮廓方程.
判断液桥断裂的准则,可用断裂点前后液桥表面积相等判定,即液桥的表面积与分离后两对象上获取液滴的表面积之和相等,可表示为
式中:dc为液桥断裂距离,S1和S2分别为断裂后两液滴的表面积.
基底辅助液滴的获取率vratio表示分配后基底占有操作液滴的能力,可表示为
本文采用基于VOF(Volume of Fluid)的方法求解气-液界面动态变化,分析液桥的动态断裂过程. 在Fluent环境下建立液桥的多相流VOF模型,仿真分析毛细力操作液滴获取的动态变化过程. VOF求解下的守恒方程为

液桥在操作探针与基底间形成,待液桥稳定后,操作探针施加分离速度v,直至液桥被拉断. 液桥分离过程中,待分配辅助液滴的基底约束为固定端面. 本文针对微操作探针-操作基底的配置方式,建立了相应的平面-平面和平面-球面动态模型,进行毛细力操作液滴获取能力的影响因素分析. 图3为两平面间毛细力操作液滴的动态分配过程,主要包括液桥的初始化和液桥的动态拉伸. 示例中的液体介质为去离子水,探针和操作基底与拉伸液体介质的接触角均为30°,拉伸速度为0.1 m/s,液体的体积为50 pL.
随着初始化进程的进行,气液界面不断进化,直至满足所设置的参数条件,在t=1.9e-4 s时达到平衡. 初始化进程完成后,采用动网格(Dynamic Mesh)方法对初始化后的液桥进行拉伸操作,以此分析操作液滴的获取能力. 在t=2.7e-4 s时液桥断裂,操作探针和基底分别获取相应体积的液滴. 通过基于VOF模型的液桥动态模拟方法,能够映射液桥形成及拉断进程中的液桥轮廓的变化,为进一步分析毛细力操作液滴的获取能力提供了必要前提条件.

t=0 s t=2.5e-6 s t=1.9e-4 s t=2.6e-4 s t=2.7e-4 s t=2.8e-4 s
图3操作液滴动态分配过程
3 操作液滴动态分配分析
3.1平面-平面配置动态分配
动态仿真结果分析中,液桥的体积、断裂距离等参数均对操作探针的半径(R=100 μm)进行量纲一化处理,量纲一的体积用V表示.
3.1.1操作探针接触角的影响
操作基底的接触角θ1=45°,在此基础上变化操作探针的固-液接触角θ2,图4为操作探针接触角对辅助液滴获取率和断裂距离的影响. 随着操作探针接触角的增加,操作基底上辅助液滴的获取率增加. 同时,液桥的断裂距离则是先增大后减小,两接触角相等时(θ1=θ2=45°),断裂后的液桥基本均分,且断裂距离最大.

(b) 断裂距离
3.1.2提升速度的影响
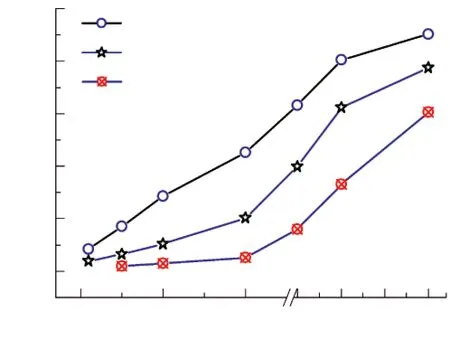
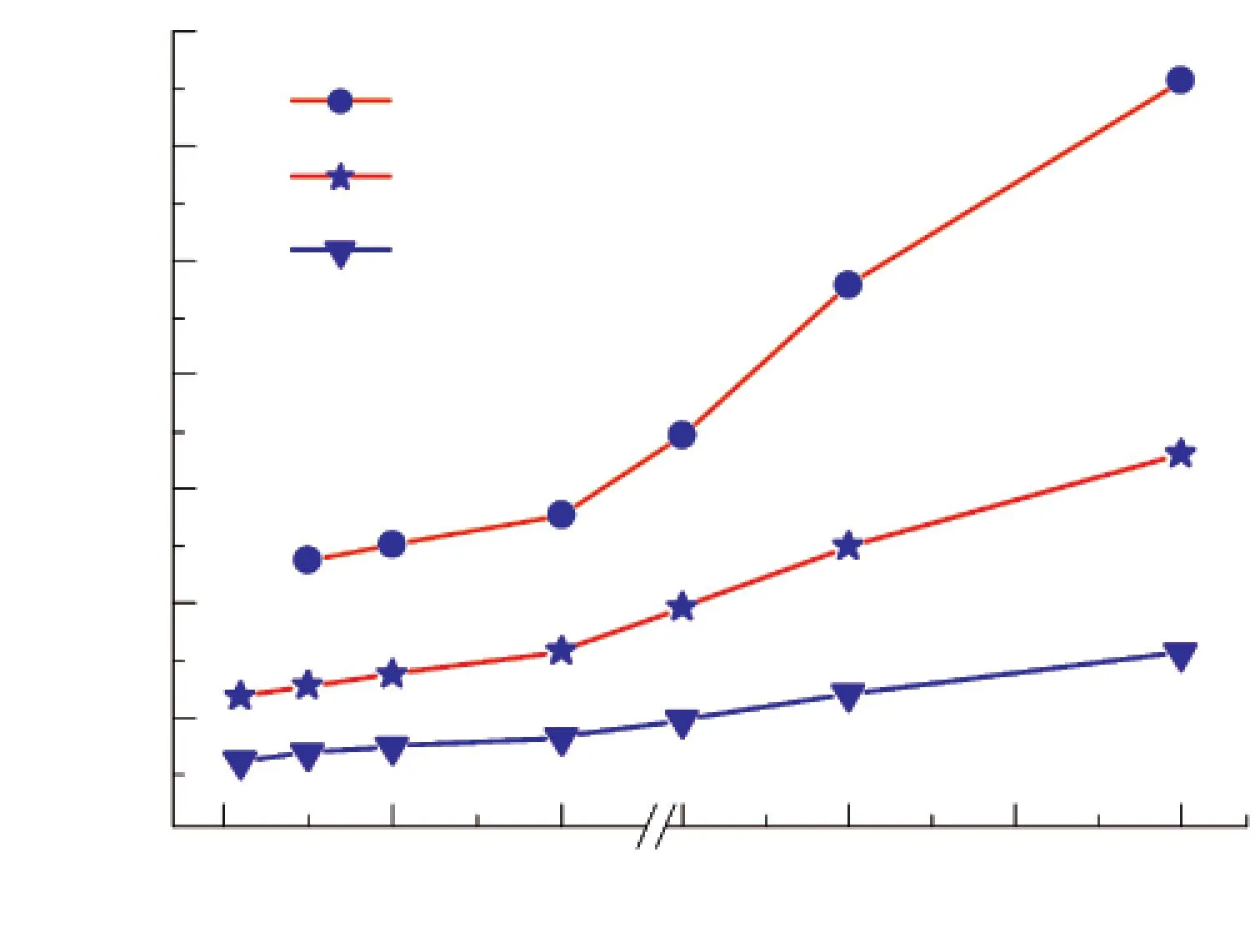
图5分析了提升速度对基底辅助液滴获取能力的影响. 实验结果表明,当θ2<θ1(θ1=45°,θ2=40°)时,辅助液滴的获取率在初始阶段随着提升速度的增大而增加,随后逐步趋向平衡;断裂距离则一直增大. 相反,当θ2>θ1(θ1=45°,θ2=50°)时,基底辅助液滴的获取率则随着提升速度的增大而减小,并趋于平衡;但断裂距离则与提升速度成正比变化,如图5 (b) 所示. 两端面接触角的变化主导了不同提升速度下辅助液滴获取率的变化趋势,促使操作液滴在两表面均分.

(a) 辅助液滴获取率

(b) 断裂距离
3.1.3液桥体积的影响
图6所示为不同液桥体积对辅助液滴获取能力的影响. 相差5倍体积的液桥,在提升速度0.01 m/s时,其辅助液滴获取率相近,没有显著性影响,断裂距离则与液桥体积成正比变化.

(a) 辅助液滴获取率

(b) 断裂距离
3.2平面-球面配置动态分配
3.2.1基底曲率半径的影响
图7为基底曲率半径对辅助液滴获取率和断裂距离影响的动态仿真结果.
(a) 辅助液滴获取率
(b) 断裂距离
断裂距离通过分别相对应的曲率半径(Rs)进行量纲一化. 在均等固-液接触角的情况下(θ1=θ2=60°),基底的曲率半径越大,辅助液滴的获取率持续增加. 与此同时,液桥的断裂距离则随着曲率半径的增大而减小,如图7 (b)所示,且操作基底半曲率径越小,提升速度对断裂距离的影响越大.
3.2.2基底接触角的影响
动态模拟进程中,操作探针的接触角恒为50°,基底的曲率半径Rs=0.1 mm,液桥的量纲一的体积V=0.05. 动态仿真结果表明(图8),随着操作基底接触角的增大,辅助液滴的获取率逐渐减小. 液桥断裂距离的最大值并非发生在两接触角相等处(θ1=θ2),因为操作基底曲率梯度产生的影响,故其实际接触角包括表征接触角和基底曲率引起的倾斜度. 在所述参数条件下,其最大断裂距离发生在θ1=30°处,且较大的提升速度对应大的断裂距离.

(a) 辅助液滴获取率

(b) 断裂距离
动态分配仿真结果表明:接触角和提升速度对操作液滴的分配具有显著影响,直接影响了初始液滴在基底上分配辅助液滴的能力. 动态分配过程中,两对象间的液桥趋向接触角小的端面,提升速度的增大则使断裂后的液桥趋向均分.
4操作液滴分配实验
4.1实验装置
在操作液滴分配动态模拟研究的基础上,构建操作液滴分配实验装置. 主要包括六自由度电动平台、光学显微镜、温度传感器、加湿器、温度控制模块、探针夹具、制冷片和水冷组件. 六自由度电动平台实现操作进程中的精密位姿调整;相互垂直安装的光学显微镜可实时获取动态分配中的液滴信息;加湿器、温度传感器和温度控制模块共同控制冷凝环境条件;制冷片和水冷组件提供制冷源;探针夹具固定冷凝操作探针. 通过上位机控制,可实现操作液滴分配实验中的液滴形成和动态分配.
4.2操作液滴动态分配实验
图9为平面-平面配置方式下操作液滴的分配过程,上位机控制制冷模块和环境湿度可实现操作探针末端冷凝液滴的获取,作为初始待分配液滴,如图9(a)所示. 操作探针下移,直至冷凝液滴与待分配辅助液滴的基底接触,两对象间形成液桥,如图9(b)所示. 液桥稳定后,操作探针上移拉伸液桥,如图9(c)所示. 液桥最终断裂,并实现液滴在基底上的分配,如图9(d)所示. 该动态分配过程中操作探针的提升速度为50 μm/s,液桥与探针和基底的接触角分别为70°和53°. 实验结果表明基底分配液滴的占有率达到90%,因为基底的接触角小,且提升速度较小,故拉断后的液滴大部分趋向基底面. 与前述仿真分析中接触角的主导作用效果一致.

(a)液滴形成 (b)液桥形成 (c)液桥拉伸 (d)液桥断裂
图10为提升速度对基底辅助液滴获取率的影响. 实验结果表明,基底辅助液滴的获取率随着提升速度的增大而减小,断裂后的液桥趋向均分(基底辅助液滴的获取率为0.5). 实验结果的变化趋势与图5(θ2>θ1)中仿真分析结果一致.

图10 提升速度对基底辅助液滴获取率的影响
虽然提升速度可控制分配后的基底辅助液滴获取率,但当两接触角相等,即液桥两端的材料属性一致时,提升速度的改变不会影响动态分配后的操作液滴占有比,初始分配液滴则均分在两端面上. 由图11中不同提升速度下的实验结果可知(液滴在两端面的接触角θ1=θ2=40°),初始分配液滴基本均分在两接触端面,与动态仿真实验结果一致. 且由图11(a)液桥断裂前的轮廓信息可知,液桥凹月面上下对称分布,断裂点在液桥中心处.

(a) v=10 μm/s (b) v=50 μm/s (c) v=500 μm/s
虽然在均等接触角下提升速度对操作液滴的分配率没有影响,但由图11断裂瞬间的图像信息可知,断裂距离随着拉伸速度的增加而增大. 此外,液桥体积对断裂距离具有主导作用,图12为操作探针的提升速度50 μm/s下,不同初始液滴体积对液桥断裂距离的影响. 实验结果表明,断裂距离随着液桥体积的增加而增大,与图6的动态仿真分析结果一致.

图12 液桥体积对断裂距离的影响
此外,针对平面-球配置方式进行了操作液滴的分配实验研究,如图13所示,直径500 μm的微球对象胶粘在基底平面上. 操作探针和微球对象间形成液桥(图13(a));操作探针以200 μm/s的提升速度拉伸液桥,图13(b)为液桥断裂前的轮廓信息,液桥断裂点靠近微球处;断裂后分配在微球上的液滴微小(图13(c)),且在室温下快速消失. 因为球体表面曲率对液桥接触角产生较大影响,如图13(a)中的球面实际接触角约为123°,远大于该时刻下的探针接触角53°,故断裂后的液桥几乎不能分配在球面基底上,与动态仿真结果一致.

(a)液桥形成 (b) 断裂前 (c) 分配后
操作液滴的动态分配实验表明,疏水表面冷凝的毛细操作液滴动态分配方法可实现液滴的可靠分配,通过控制接触角、提升速度和液桥体积可实现对基底分配液滴量的控制. 实验和动态仿真研究中参数影响的一致性证明了基于VOF法的液滴动态分配模拟的有效性.
5结论
1)本文提出一种疏水表面冷凝的毛细力操作液滴分配方法,通过冷凝控制获取初始操作液滴,保证了毛细力操作液滴分配所需的先决条件,可实现基底辅助液滴的分配.
2)针对操作液滴的分配,基于VOF计算方法模拟液桥的拉断进程,并以基底辅助液滴的获取率分析动态分配后操作液滴的获取能力. 建立了平面-平面、平面-球面模式下的动态液桥进化模型,分析了接触角、提升速度、液桥体积等因素对基底辅助液滴获取率和断裂距离的影响. 实际接触角的差异对基底辅助液滴获取率影响较大,液桥趋向接触角较小的端面,最大断裂距离发生在两接触角相等处. 提升速度增大促使断裂后的液桥趋向均分,断裂距离则一直增大.
3)构建实验平台,完成了所提出方法的动态实验分析,可实现操作液滴的分配. 分配后的液滴趋向接触角小的端面,提升速度的增大促使分配在两表面的液滴均分,与动态仿真结果一致,验证了所提出方法的可行性和有效性. 下一步将改变基底表面曲率半径和操作探针形状,开展进一步的实验研究.
参考文献
[1] WASON J D, WEN J T, GORMAN J J, et al. Automated multiprobe microassembly using vision feedback[J]. IEEE Transactions on Robotics, 2012, 28(5): 1090-1103.
[2] LI X, CHEAH C C, HU S, et al. Dynamic trapping and manipulation of biological cells with optical tweezers[J]. Automatica, 2013, 49(6): 1614-1625.
[3] CHEN Haoyao, SUN Dong. Moving groups of microparticles into array with a robot-tweezers manipulation system[J]. IEEE Transactions on Robotics, 2012, 28(5): 1069-1080.[4] LENDERS C, GAUTHIER M, COJAN R, et al. Three-DOF microrobotic platform based on capillary actuation[J]. IEEE Transactions on Robotics, 2012, 28(5): 1157-1161.[5] DOPFER D, PALZER S, HEINRICH S, et al. Adhesion mechanisms between water soluble particles[J]. Powder technology, 2013, 238: 35-49.
[6] FANTONI G, HANSEN H N, SANTOCHI M. A new capillary gripper for mini and micro parts[J]. CIRP Annals-Manufacturing Technology, 2013, 62(1): 17-20.
[7] AL A A, JAGTIANI A, VASUDEV A, et al. Soft microgripping using ionic liquids for high temperature and vacuum applications[J]. Journal of Micromechanics and Microengineering, 2011, 21(12): 125025-125032.
[8] VASUDEV A, ZHE J. A capillary microgripper based on electrowetting[J]. Applied Physics Letters, 2008, 93(10): 103503-103505.
[9] LUTFURAKHMANOV A, LOKEN G K, SCHULZ D L, et al. Capillary-based liquid microdroplet deposition[J]. Applied Physics Letters, 2010, 97(12): 124107-124109.
[10] LAMBERT P, SEIGNEUR F, KOELEMEIJER S, et al. A case study of surface tension gripping: the watch bearing[J]. Journal of Micromechanics and Microengineering, 2006, 16(7): 1267-1276.
[11]OBATA K J, MOTOKADO T, SAITO S, et al. A scheme for micro-manipulation based on capillary force[J]. Journal of Fluid Mechanics, 2004, 498: 113-121.
[12]WANG Lefeng, CHU Zhaoqi, FAN Zenghua, et al. Simulation of liquid meniscus and microdrop formation of a capillary gripper for microparts transfer[J]. Advanced Materials Research, 2014, 971: 915-919.
[13]FUCHIWAKI O, KUMAGAI K. Development of wet tweezers based on capillary force for complex-shaped and heterogeneous micro-assembly[C]//2013 IEEE International Conference on Intelligent Robots and Systems. Tokyo: IEEE, 2013: 1003-1009.[14] 范增华, 荣伟彬, 王乐锋, 等. 疏水表面冷凝的可控毛细力微对象操作方法与实验[J]. 机器人, 2015, 37(6): 648-654.
[15] FAN Zenghua, WANG Lefeng, RONG Weibin, et al. Dropwise condensation on a hydrophobic probe-tip for manipulating micro-objects[J]. Applied Physics Letters, 2015, 106(8): 084105-084108.
[16] FAN Zenghua, RONG Weibin, WANG Lefeng, et al. A single-probe capillary microgripper induced by dropwise condensation and inertial release[J]. Journal of Micromechanics and Microengineering, 2015, 25(11): 115011-115020.
(编辑杨波)
Dynamic distribution of capillary microdroplet using water condensation on hydrophobic surface
FAN Zenghua, RONG Weibin, WANG Lefeng, SUN Lining
(State Key Laboratory of Robotics and System (Harbin Institute of Technology), Harbin 150080, China)
Abstract:A microdroplet distribution method based on water condensation on hydrophobic surface is presented to obtain micromanipulation droplet for capillary gripping. Accordingly, the droplet condition required in micro-objects transfer (pick-and-place) is investigated. Model of liquid bridge stretching is established during microdroplet dispensing. Two configurations (plane-plane, plane-sphere) of dynamic liquid bridge is modeled using VOF (Volume of Fluid) method to analyze the acquisition process of capillary micromanipulation droplet. Simulation results demonstrate that the contact angle and drawing velocity have a significant influence on the acquisition fraction of auxiliary droplet and rupture distance. The initial liquid bridge moves toward the surface with small contact angle after the formed liquid bridge rupture. Micromanipulation probes with big drawing velocity enable manipulation droplet to split on two surfaces equally. The impact of droplet volume on the acquisition fraction of auxiliary droplet is relatively small, but is proportional to the rupture distance. Configurations (plane-plane, plane-sphere) of dynamic liquid bridge are experimental investigated to verify feasibility of the proposed method.
Keywords:micromanipulation; capillary; droplet; dynamic liquid bridge; dispensing
doi:10.11918/j.issn.0367-6234.2016.07.002
收稿日期:2016-01-05
基金项目:国家自然科学基金创新研究群体科学基金(51521003); 机器人技术与系统国家重点实验室(哈尔滨工业大学)自主研究课题(SKLRS201602C)
作者简介:范增华(1986—),男,博士研究生; 荣伟彬(1972—),男,教授,博士生导师;孙立宁(1963—),男,博士生导师,长江学者特聘教授
通信作者:荣伟彬,rwb@hit.edu.cn
中图分类号:TP24
文献标志码:A
文章编号:0367-6234(2016)07-0014-06
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
力学学报(2022年2期)2022-03-20
生物工程学报(2020年7期)2020-07-29
高校化学工程学报(2020年2期)2020-06-10
原子能科学技术(2020年1期)2020-03-30
铁道通信信号(2020年9期)2020-02-06
汉语世界(The World of Chinese)(2019年3期)2019-07-01
数学大王·趣味逻辑(2019年5期)2019-06-13
小学科学(学生版)(2019年5期)2019-05-21
原子能科学技术(2015年1期)2015-03-20
