地波雷达组网探测高空目标优化布站
2016-06-28 08:01陈朝晖郭徽东
指挥控制与仿真 2016年3期
陈朝晖,郭徽东
(1.东海舰队参谋部海情中心,浙江宁波 315122;2.海军92403部队51分队,福建福州 350007)
地波雷达组网探测高空目标优化布站
陈朝晖1,郭徽东2
(1.东海舰队参谋部海情中心,浙江宁波315122;2.海军92403部队51分队,福建福州350007)
摘要:针对高空无人机等目标,建立基于高频地波雷达为主的2D雷达探测网,以目标高度估计和协同补盲为约束条件,对2D雷达网的优化布站问题进行理论计算和实例仿真,实验结果证明布站方法的有效性。
关键词:地波雷达;高度估计;盲区;布站
美“全球鹰”、“捕食者”等无人机在全球开展各种侦查任务,尤其在我沿海抵近侦查任务越趋频繁;高空无人机外形和横截面设计自由度大,采取了雷达和红外隐身等技术,对一般的地面雷达而言,其RCS只有0.1m2,探测难度大[1]。高频地波雷达工作波段长、电磁波绕射超视距探测,对隐身目标具有较好的探测性能,如何利用地波雷达和其他常规警戒雷达进行优化组网布站,并对其进行较为准确的定位,从而引导其他传感器对其准确定位和连续跟踪,对高空隐身无人机目标的预警具有重要意义[2]。
1雷达组网类型
高频地波雷达利用垂直极化电磁波沿海面绕射传播衰减较小的特点,能够探测数百千米外的海上飞行目标,其工作频率在短波段,超出了隐形飞机设计频率范围,使雷达所呈现的雷达截面积增大,如厘米波条件下的隐形目标的雷达截面积为0.01m2,同一目标在米波条件下的0.1-0.3m2,提高10-35dB;然而高频地波雷达只能直接测量到目标的距离和方位信息,无法直接得到飞行目标高度信息,忽略高度信息直接在二维平面上对飞行目标进行跟踪将造成较大的定位误差[3]。为充分利用高频地波雷达反隐身特点,将高频地波雷达、常规对空警戒雷达等不同频段和不同体制的雷达进行优化布站,形成对空2D雷达组网,组网类型主要为:高频地波雷达和常规对空雷达网形成的2D雷达网。
2布站分析
由于高频地波雷达与其他2D雷达组成反隐身探测网时,主要考虑其他雷达对隐身目标来袭方向上的补盲系数和对空域隐身目标的高度定位,为从战术配置上同时兼顾上述考虑,需分析区域补盲系数和高度定位的布站优化问题。
2.1高度估计
高频地波雷达只能直接测量到目标的距离和方位信息,无法直接得到飞行目标高度信息。通过多部雷达合理布站数据融合,综合利用来自多部雷达的资源和相关冗余信息,可以获得比运用单部、孤立的雷达更加详细而精确的目标位置[4-5],如图1所示。

图1 双站地波雷达测高示意图
可得目标高度表达式为
(1)
高度估计方差为σH,有
(2)
其中,
(3)
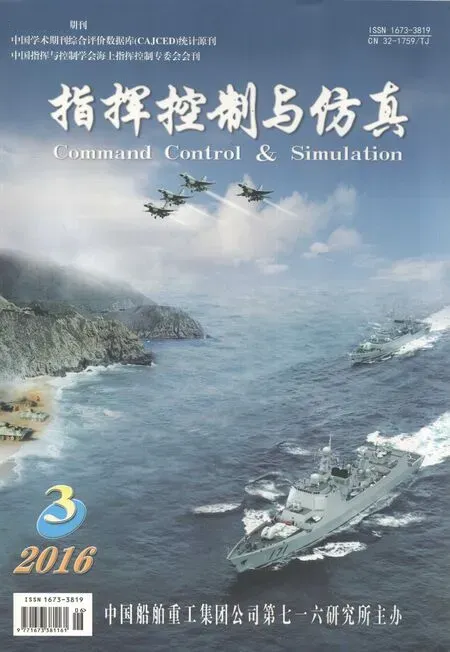
综合文献[3]高频地波雷达仿真参数,假设高频地波雷达1[X1,Y1]=[0km,0km], 高频地波雷达2[X2,Y2]=[80km,0km]距离量测均方误差为200m,角度均方误差为1°,前置雷达[X,Y]=[40km,40km],距离量测均方误差为100m,角度均方误差为0.5°,无人机目标高度19000m;前置雷达与两套高频地波雷达成等腰三角形配置。由图2知,双站地波雷达组网对高空目标的高度估计误差较大,距离30km时高度估计误差约13%;引入哨舰部署的前置雷达组网后(见图3),以等腰三角形配置时,对高空目标高度估计有显著改善,前出雷达平台附近30km内目标高度估计误差约3%;即在地波雷达主要方向上配置1部常规警戒雷达对组网地波雷达的高空目标估计具有明显战术作用。
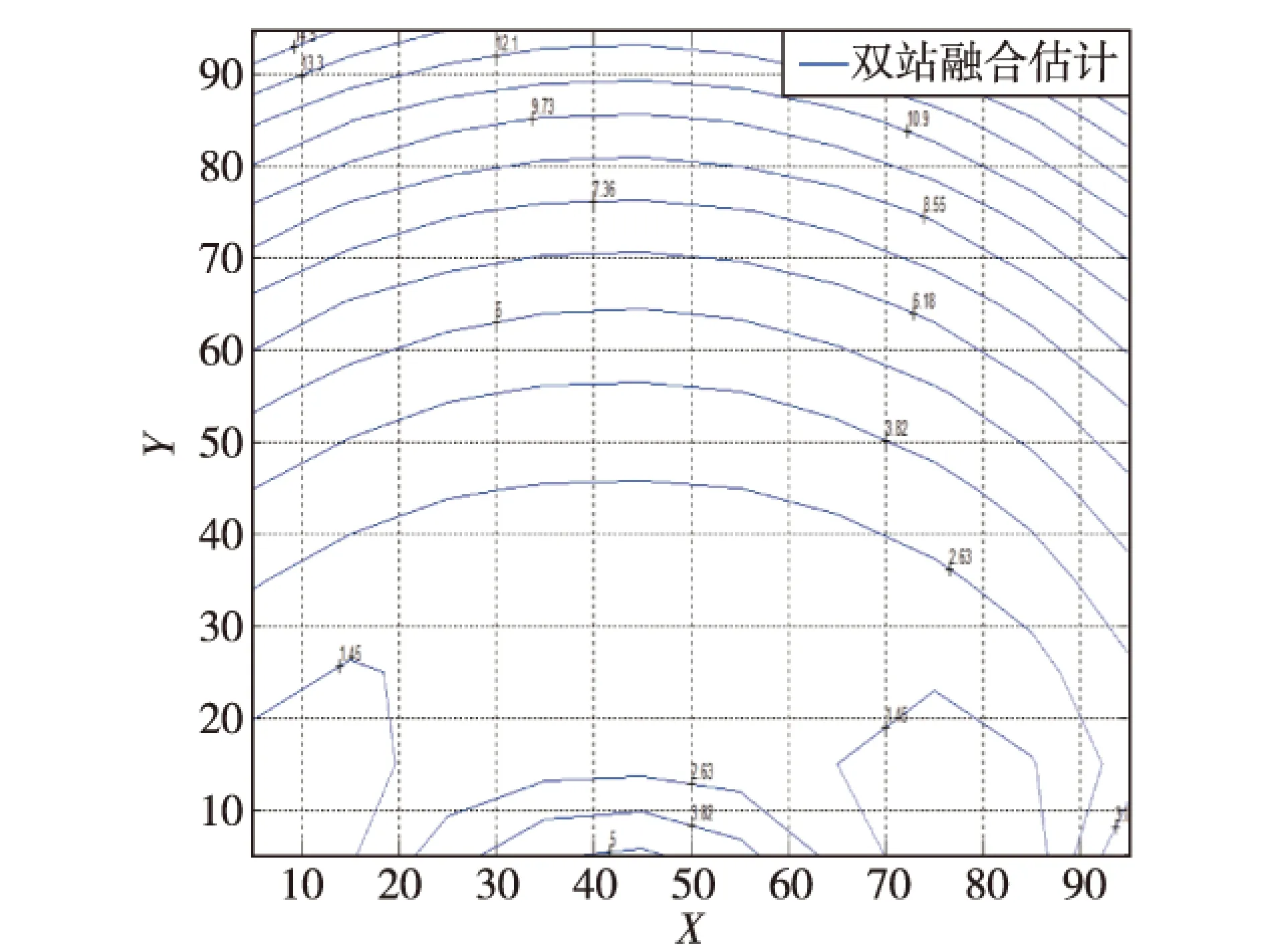
图2双站地波雷达测高
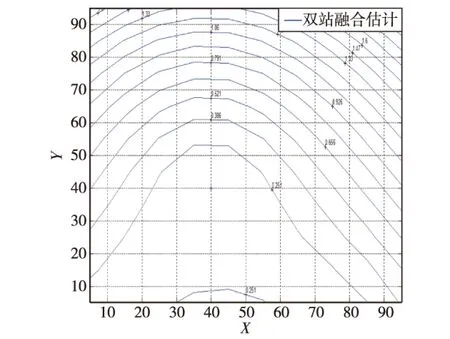
图3 地波雷达与前置雷达组网测高
2.2补盲系数
研究结果表明[6-7],在空间上隐身飞机的隐身设计主要针对其机头机尾方向,隐身飞机在鼻锥方向和尾后方向一定角度范围内RCS缩减明显,而在其它方向缩减不多。将隐身目标的RCS作如下处理[1]:机头±45°方向和机尾±45°方向的RCS很小或接近为零,其它方向的RCS等同于普通飞机,单基雷达对隐身目标的稳定跟踪范围如图4所示。高频地波雷达与常规对空警戒雷达组网时,网内雷达均为2D雷达,前置雷达平台部署首先考虑对空警戒雷达的补盲系数问题,组网形式主要为1部前置常规对空2D警戒雷达在重点方向上进行协同补盲。

图4 雷达对隐身目标的跟踪范围
双站地波雷达补盲:假设地波雷达性能相同,最大探测距离均为Rmax(图5),雷达O2对雷达O1进行凹口补盲,d为雷达间距,隐身飞机入侵方位角为w。

图5 双站地波雷达补盲
(4)
(5)
(6)
O1C=dsin(π/4-w)
(7)
SABO1C≈BO1·O1C·sin(π/2)
(8)
(9)
(10)
补盲系数由式(10)计算。其中,
(11)
入侵方向为-10°、0°、10°时两雷达的最佳布站距离分别为0.5Rmax、0.55Rmax、0.6Rmax,补盲系数为分别为0.23、0.26、0.28(见图6)。

图6 不同配置距离时双站地波雷达补盲系数
前出雷达与地波雷达补盲:由图6知,双站地波雷达组网的共同盲区为圆弧ACD,为保证对空观察的区域覆盖,前出雷达O3的协同补盲区域为ACD。由于单基雷达对隐身目标的盲区为机首方向±45°,补盲区域ACD应纳入前出雷达的观察范围内,前置雷达对地波雷达盲区ACD补盲后,补盲区域为A′B′CC′和D′DE′G′,补盲系数和补盲面积按双站雷达补盲关系计算。由几何关系得
(12)
DE′=CC′=d′sin(π/4-w)
(13)
AC′=rmax-CC′
(14)
SA′B′CC′≈CC′·AC′
(15)
SD′DE′G′≈DD·DE′
(16)

图7 前置雷达补盲

图8 0.5Rmax时前置雷达对双站地波雷达的补盲面积曲线
双站地波雷达补盲仿真态势为:沿岸部署2套高频地波雷达,地波雷达对空中隐身目标最大探测距离Rmax=150km,假设前置雷达对空中隐身目标最大探测距离Rmax=60km,地波雷达间配置间距、前哨雷达与地波雷达盲区端点的配置间距由式(10)计算;空中目标相对地波雷达的入侵角w=-10°,0°,10°。
由图6知,当w=-10°,0°,10°,双站地波雷达对来袭方向上隐身目标探测时,最佳布站距离分别为0.51Rmax、0.53Rmax、0.58Rmax;入侵角ω小,补盲系数低,入侵角ω增大,补盲系数加大,组网效果较好。图8为前置雷达与双站地波雷达共同盲区凹口点C(图5)不同距离时,前置雷达对双站地波雷达的补盲面积值,由图8可知,0.68倍RAC距离时,补盲面积最大,约为2100km2。
3实例计算
在上文仿真参数和补盲配置基础上,对地波雷达和前置雷达对高空隐身目标进行组网估计;高频地波雷达O1[X1,Y1]=[0km,0km],高频地波雷达O2[X2,Y2]=[120km,0km],假设其最大探测距离Rmax=200km,距离量测均方误差为200m,角度均方误差为1°,前置雷达O3最大探测距离rmax=60km,距离量测均方误差为100m,角度均方误差为0.5°;无人机目标高度15000m。
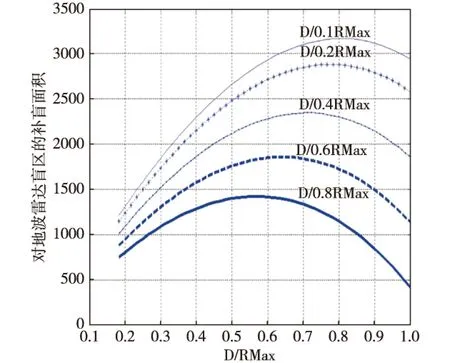
图9 前置雷达对地波雷达盲区的补盲面积

图10 前置雷达入网后目标的高度估计
由探测高空隐身目标组网布站流程,计算地波雷达最佳部署距离和补盲面积。图9为前置雷达对地波
雷达盲区的补盲面积,图10为前置雷达入网后目标的高度估计。由图9知,地波雷达间距越小,地波雷达共同盲区越大,需前置雷达进行补盲的面积越大,最大可达3200km2。综合图6、图9,入侵角w=0时,地波雷达最佳间距约为0.5-0.6Rmax,此时,前置雷达对地波雷达共同盲区的最佳间距约为0.6-0.7Rmax,补盲面积约为1800km2。地波雷达间距小于0.5Rmax时,前置雷达应配置在距地波雷达凹口盲区点0.7-0.8Rmax附近,此时补盲面积较大;地波雷达间距大于其最佳间距时,前置雷达应配置在距地波雷达凹口盲区点0.5-0.6Rmax左右附近,此时补盲面积较大。
根据图9的仿真结果,配置前置雷达入网,其配置阵位为距地波雷达凹口盲区点右侧0.6Rmax。由图10知,前置雷达入网后目标的高度估计明显提升,入侵角方向50km内,前置雷达对高空目标的高度估计误差小于1km,30km内,高度估计误差小于500m;重点地波雷达2探测范围100km内,高度估计误差小于800m;地波雷达1探测范围50km内,高度估计误差小于1km。
4结束语
基于地波雷达组网布站是以理想2D雷达组网探测高空隐身目标为应用背景,综合隐身目标RCS特性和多站2D雷达高度估计等因素,对地波雷达、前置雷达的布站方法进行计算和仿真,对发挥组网雷达大范围观察预警具有较强的现实意义;关于前置雷达的机动部署和隐身目标入侵角等因素的考虑有待进一步研究。
参考文献:
[1]季华益.“全球鹰”及其对抗策略思考[J].航天电子对抗,2012(1):26-30.
[2]马井军,赵明波,等.飞机隐身技术及其雷达对抗措施[J].国防科技,2009(5):38-44.
[3]赵孔瑞,周共健,于长军,等.高频地波雷达飞行目标高度估计[J].系统工程与电子技术,2012(8):1571-1575.
[4]雷雨,冯新喜,等.2D雷达组网几何定位融合算法[J].系统工程与电子技术,2011(5):1151-1156.
[5]郭冠斌.两坐标雷达组网测高的可能性[J].雷达科学与技术,1996(4):6-11.
[6]张彬,王韬,吴志文.空域反隐身的雷达优化布站与仿真[J].雷达与对抗,2003(3):5-7.
[7]卢盈齐,祝长英.雷达组网反隐身的一种优化布站方法[J].系统工程理论与实践,2007(6):166-169.
Optimized Deployment on Networked Surface Wave OTHR for Airtarget Detection
CHEN Chao-hui1, GUO Hui-dong2
(1.The Joint Naval Intelligence Center of the East China Sea Fleet Command, Ningbo 315122;2.Team 51,Unit 92403 of Navy,Fuzhou 350007, China)
Abstract:To detect the high altitude target,the model of high-frequency groud wave radar netting is established based on altitude estimation and notch blind area,The optimal deployment of radars netting is discussed when the orientation of target varies.the simulation results evaluate the performance of the proposed method.Some useful conclusions are achieved.
Key words:groud wave radar; high estimation; notch blind area; deployment
文章编号:1673-3819(2016)03-0055-04
收稿日期:2016-01-08
作者简介:陈朝晖(1975-),男,浙江金华人,工程师,研究方向为雷达信息处理。 郭徽东(1976-),男,博士,工程师。
中图分类号:TN958;E91
文献标志码:A
DOI:10.3969/j.issn.1673-3819.2016.03.010
修回日期: 2016-02-16
猜你喜欢
趣味(数学)(2022年4期)2022-07-02
中国生殖健康(2020年5期)2021-01-18
教书育人(2020年11期)2020-11-26
当代陕西(2020年13期)2020-08-24
家庭影院技术(2020年6期)2020-07-27
电子制作(2019年15期)2019-08-27
小雪花·初中高分作文(2019年2期)2019-06-27
小学生学习指导(低年级)(2018年12期)2018-12-29
雷达学报(2017年1期)2017-05-17
为了孩子(3~7岁)(2016年5期)2016-05-14