
基于积分滑模的欠驱动UUV地形跟踪控制
2016-06-27 09:59严浙平于浩淼李本银周佳加
哈尔滨工程大学学报 2016年5期
严浙平,于浩淼,李本银,周佳加
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
基于积分滑模的欠驱动UUV地形跟踪控制
严浙平,于浩淼,李本银,周佳加
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
摘要:针对参数摄动以及外界环境扰动条件下欠驱动水下无人航行器(UUV)地形跟踪控制任务,提出了一种基于反步法(Backstepping)和积分滑模控制方法(ISMC)的地形跟踪控制策略。首先,利用航行器的运动学特性以及局部Serret-Frenet坐标系,建立UUV地形跟踪误差方程。然后,分别采用反步法和ISMC设计运动学控制(制导律)和动力学控制器。利用有限时间稳定性理论证明该地形跟踪控制策略作用下的闭环运动系统为全局有限时间收敛的。仿真结果表明,所提出的地形跟踪控制策略可以有效地实现地形跟踪任务,并且对于参数摄动以及外界干扰具有很强的鲁棒性。
关键词:欠驱动UUV;地形跟踪;参数摄动;有限时间稳定;积分滑模控制;反推法
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.U.20160411.0845.002.html
近年来,随着海洋开发的逐步深入,UUV越来越受到海洋工程领域专家们的关注。目前,UUV主要被应用于海洋科学调查、海底资源勘探、海底地形勘察等使命任务[1-2]。在执行上述使命任务时,UUV需要与海底保持恒定高度航行,亦即地形跟踪[3-6]。因此,精确的地形跟踪能力是保障UUV顺利完成上述任务的关键技术。在地形跟踪中,期望航迹通常是利用已知海底地形信息,或者航行器携带的多波束声呐获得,以及任务需求拟合出满足航行器动力学性能约束的定高路径。出于航行器的造价成本、总质量、推进效率等方面考虑,UUV的运动控制执行机构通常被配置为欠驱动模式[7]。由于本文所研究的UUV在垂向缺少直接的推进装置,所以其属于典型的欠驱动系统;该UUV也受到二阶非完整性约束。根据Brockett准则可知,欠驱动UUV无法被任何连续的时不变的状态反馈控制律镇定[8]。此外,欠驱动UUV运动系统还会受到参数摄动、海流等内外扰动的影响[9],使得欠驱动UUV的运动控制器的设计具有一定的挑战性。
目前,国内外学者对于欠驱动UUV的地形跟踪控制已经取得了一定的研究成果。Silvestre等将地形跟踪问题转化为线性误差参数方程镇定问题;进而,采用增益调度控制理论以及LMI设计预见跟踪控制器[10]。边信黔等提出了一种基于迭代滑模增量反馈的欠驱动UUV地形跟踪控制策略,有效地避免了航行器俯仰舵的抖振现象[3]。贾鹤鸣等在文献[4-6]中分别利用自适应神经网络、非线性反步法以及迭代滑模控制方法设计了欠驱动UUV地形跟踪控制器。Melo等分别采用线性回归算法以及卡尔曼滤波两种方法设计观测器用以估计航行器的高度以及纵倾角;分别将两种预估信号输入到跟踪控制器中,由结果可知,卡尔曼滤波观测器更适合于地形跟踪使命[11]。Adhami-Mirhosseini等采用傅里叶级数理论以及非线性输出调节理论设计出了一种输出反馈地形跟踪控制器[12]。在上述关于地形跟踪问题的研究中,航行器的运动模型均被假设为精确模型。然而,实际中UUV的水动力系数很难获得精确值;此外,当航行器航行于近水面或近海底面时,由于流场边界条件的改变,致使UUV的水动力系数产生摄动[13]。因而,欠驱动UUV的运动控制器的设计需要考虑对于参数摄动的鲁棒性。
本文提出一种基于反步法以及ISMC地形跟踪控制器。在期望参考路径上建立局部Serret-Frenet坐标系,引入虚拟航行器,进而建立起地形跟踪误差方程。然后,利用反步法设计欠驱动UUV的运动学跟踪控制器。接下来,利用ISMC将地形跟踪控制器从运动学层面扩展到动力学层面,从而实现欠驱动UUV的地形跟踪控制。最后,证明所设计的地形跟踪控制策略能够在有限时间内全局镇定跟踪误差。
1UUV地形跟踪问题描述
1.1UUV运动模型
欠驱动UUV的空间运动通常可以描述为6DOF的运动微分方程组[9]。这些运动方程具有很强的非线性和高度的耦合性。在工程中,为了简化控制器的设计,可以将航行器的空间运动模型解耦为两个弱相互作用的子系统:垂直面运动子系统和水平面子系统。由于本文仅研究欠驱动UUV的地形跟踪问题,在控制器设计过程中,可以仅考虑航行器的垂直面运动状态。由文献[9]可知,UUV的垂直面的运动学方程描述为
(1)
式中:ξ和ζ表示航行器的运动坐标系B的原点在固定坐标系I中的笛卡尔坐标;θ航行器的纵倾角;u和w分别为航行器的纵向速度和垂向速度;q为航行器的纵倾角速度。由于本文致力于欠驱动UUV的地形跟踪控制研究,因而航行器的动力学建模可以忽略横向运动、转艏运动以及横摇运动的影响。由文献[14]可知,欠驱动UUV的垂直面的动力学方程表示为
(2)

1.2跟踪误差方程
对于地形跟踪控制问题,其一般的解决方案为:通过引入适当的航行器运动状态误差空间,地形跟踪控制问题可以被转化为镇定问题。为了建立状态误差空间,需要在期望参考路径上引入局部Serret-Frenet坐标系F。该坐标系的原点通常选择为距离航行器的最近点;其坐标轴分别被选为{F}原点处参考路径的切线以及副法线。欠驱动UUV地形跟踪示意图如图1所示。设Serret-Frenet坐标系F在固定坐标系I下的位姿(位置+姿态)为pR=[ξRζRθF]T,航行器的当前位姿可以表示为p=[ξζθ]T,pe=[ξeζeθe]T表示航行器的地形跟踪误差。

图1 欠驱动水下无人航行器地形跟踪示意图Fig.1 The bottom-following schematic of Underactuated UUV
由图1的几何关系可知,航行器的位姿误差在Serret-Frenet坐标系F下被描述为
(3)

(4)
由于欠驱动UUV在垂向上缺少直接推进输入,因此航行器的纵向速度u通常远远大于垂向速度w(u≫w)。因而,航行器的垂直面运动学方程可以被简化为

(5)
根据攻角定义α=arctan(w/u)以及u≫w可知,攻角α及其各阶导数均可以近似为零。因此,可以得到如下跟踪误差动力学方程:
(6)
式中:θe=θ-θF;κ(s)表示Serret-Frenet坐标系F原点处的曲率。因而,欠驱动UUV地形跟踪控制问题被转化为如何镇定跟踪误差pe=[ξeζeθe]T。
2UUV地形跟踪制导律设计

对于地形跟踪控制而言,其核心问题是如何驱动航行器跟踪上期望参考路径(由单波束测深仪测得海底数据拟合获得的);也就是说,其核心问题是如何镇定位置误差ξe和ζe。为了实现上述控制目标,选取如下正定的二次型Lyapunov函数:
(7)
对式(7)求导,并代入式(6)可以得到:
(8)

(9)

(10)
(11)
考虑式(8),并对式(11)求导,可得
(12)
结合式(10)可知,选取如下期望纵倾角速度:
(13)
式中:λ3为待选定的正定制导律增益。在制导律(9)和(12)共同作用下,Lyapunov函数(11)的导数满足
3UUV地形跟踪控制器设计
在第2节中,全局有限时间收敛的欠驱动UUV地形跟踪制导律已被成功建立起来。为了驱使UUV的纵向速度和纵倾角速度能够跟踪上第2节中给出的期望值,需要设计适当的动力学控制输入。为了实现上述控制目标,引入如下跟踪误差变量:
(14)
3.1动力学控制器设计
为了镇定跟踪误差(14),利用积分滑模控制方法(ISMC)设计动力学跟踪控制器。首先,引入如下一阶积分滑模面:
(15)
进而,实现纵向速度误差ue的镇定。式中:λ4>0。在不考虑航行器参数摄动的情况下,对式(15)求导,可以得到:
式中:“^”表示欠驱动UUV水动力系数的标称值;航行器的水动力系数标称值可以通过实船试验法、自航船模实验法和约束船模实验法获得[17]。令上式等于零,可以得到等效控制律τ1eq:
(16)
然而,等效控制律并不能保证在参数摄动以及外界扰动存在情况下的控制效果;所以必须引入辅助控制律即趋近律进行补偿,用以克服内外扰动对于航行器的运动效果的影响。纵向速度控制器的趋近律选择如下形式:
(17)

式中:η1>0。由式(17)可知,航行器的纵向速度控制器为:
(18)

(19)
根据Lyapunov函数Vsurge的定义可知,其是正定的且径向无界的。那么,根据文献[16]中的定理2.2可知,纵向速度误差ue在有限时间T1内全局镇定;并且,T1满足:
类似于纵向速度误差ue的镇定,接下来,将引入如下一阶积分滑模面:
(20)
式中:λ5>0。在无参数摄动的情况下,S2导数为
令上式等于零,可以得到等效控制律τ3eq:
(21)
同理,构建如下趋近律
(22)
补偿内外扰动对于航行器的运动控制效果的影响。式中K2为控制增益,其定义为:
式中η2>0。进而,纵倾角速度控制器输入为
(23)

(24)
根据Lyapunov函数Vpitch的定义可知,其是正定的且径向无界的。由文献[16]中的定理2.2可知,纵倾角速度误差qe在有限时间T2内全局镇定,并且T2满足
3.2航行器运动控制系统稳定性分析
为了分析整个闭环系统的稳定性,选取如下正定Lyapunov函数:
(25)
显见,上述定义的Lyapunov函数为径向无界的。对Lyapunov函数(25)求导,可以得到:
根据文献[16]中的定理2.2可知,在地形跟踪控制器(18)和(23)作用下,跟踪误差ξe、ζe、θe、ue和qe能在有限时间内全局收敛到原点。
4UUV地形跟踪仿真结果及分析
为了验证本文所提出的地形跟踪控制策略的有效性,基于欠驱动UUV运动模型建立航行器地形跟踪虚拟仿真平台。在下面的数值仿真中,分别加入±10%的参数摄动、3级海况下的海流干扰以及0.5 m/s恒定未知海流(对于控制器而言)。本文的数值仿真实验中,采用“直线+斜线+正弦曲线”作为仿真的期望路径,其具体表达式为
(26)
(27)
设航行器的初始纵倾角以及初始纵向速度均为零,即θ=0°和u=0 m/s。在本次仿真中,航行器的期望速度被设定为2 m/s,即ud= 2 m/s。全局有限时间收敛的地形跟踪控制器的增益系数被分别设定为λ1=0.3、λ2=0.75、λ3=20、λ4=12、λ5=708、η1=0.4以及η2=0.3。
数值仿真结果如图2~6所示。图2中点划线表示实际的海底地形,它是由多波束声呐测得数据拟合得到;点虚线代表参考路径,为一条距离海底恒定高度的曲线(通常,根据任务需求确定高度)。
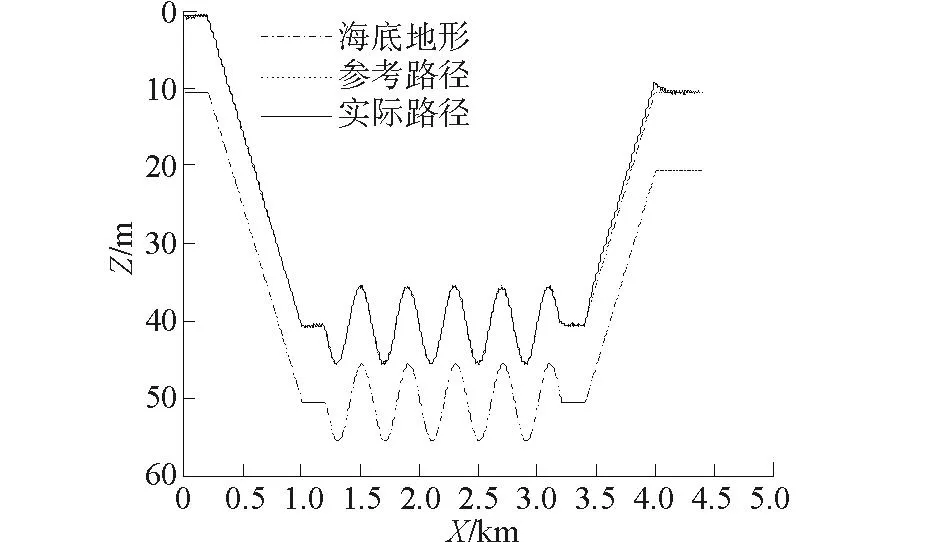
图2 地形跟踪中的参考路径与实际路径Fig.2 The reference path and actual path in the Bottom-following
由图2可以看出,本文所提出的控制策略可以很好的实现地形跟踪控制任务。深度跟踪误差如图3所示。由图2、3可知,本文所提出的基于积分滑模的地形跟踪控制器可以有效地实现地形跟踪控制目标。图4表示航行器的速度控制相应曲线,为更好的展现速度控制效果,本文仅给出前50s的响应曲线。可以看到,基于积分滑模的速度控制器可以实现无超调的、快速的速度跟踪控制。在欠驱动UUV地形跟踪控制中,纵向控制力以及纵倾控制力矩响应曲线如图5和图6所示。

图3 欠驱动UUV深度跟踪误差Fig.3 The depth tracking error for underactuated UUV

图4 欠驱动UUV速度控制响应曲线Fig.4 The velocity control response curve for underactuated UUV
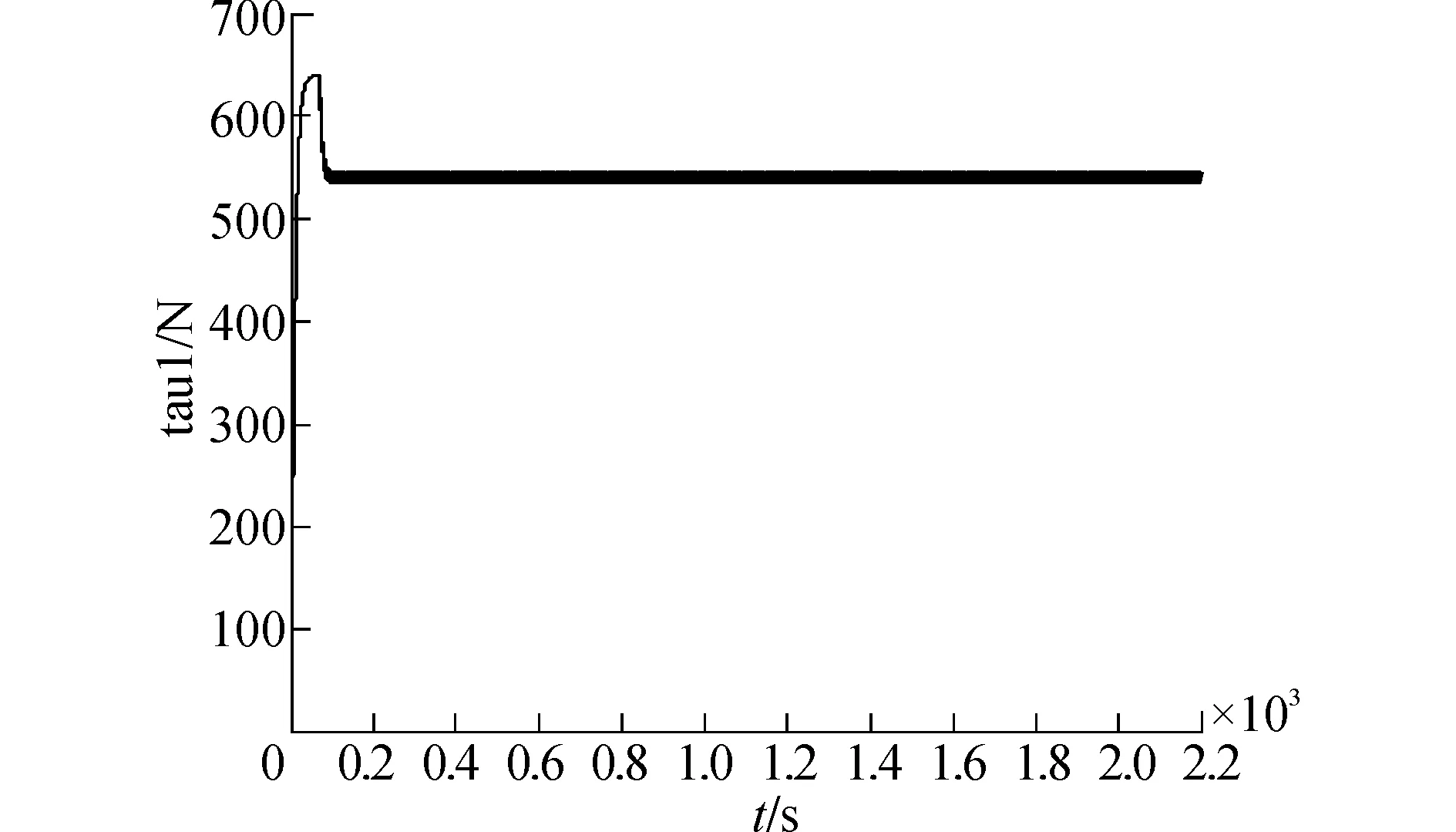
图5 欠驱动UUV纵向控制力响应曲线Fig.5 The surge force response curve for underactuated UUV

图6 欠驱动UUV纵倾力矩响应曲线Fig.6 The pitch torque response curve for underactuated UUV
4结论
针对欠驱动UUV轨迹跟踪控制问题,提出了一种基于Lyapunov直接法和ISMC的地形跟踪控制方法。经过稳定性分析以及数值仿真可知,该地形跟踪控制方法具有如下优点:
1)任意地形跟踪误差可以在有限时间内被镇定到原点;
2)该控制器对于参数摄动和 3 级以下的海浪扰动量具有强鲁棒性。
此外,由于采用局部Serret-Frenet坐标系建立地形跟踪误差方程,使得该地形跟踪控制器可以驱使航行器同时跟踪直线类型和曲线类型的路径。
参考文献:
[1]YUH J. Design and control of autonomous underwater robots: a survey[J]. Autonomous robots, 2000, 8(1): 7-24.
[2]陈强. 水下无人航行器[M]. 北京: 国防工业出版社, 2014: 1-27.
CHEN Qiang. Unmanned underwater vehicle[M]. Beijing: National Defense Industry Press, 2014: 1-27.
[3]边信黔, 程相勤, 贾鹤鸣, 等. 基于迭代滑模增量反馈的欠驱动AUV地形跟踪控制[J]. 控制与决策, 2011, 26(2): 289-292, 296.
BIAN Xinqian, CHENG Xiangqin, JIA Heming, et al. A bottom-following controller for underactuated AUV based on iterative sliding and increment feedback[J]. Control and decision, 2011, 26(2): 289-292, 296.
[4]段海庆, 贾鹤鸣, 周佳加, 等. 基于神经网络的欠驱动水下机器人地形跟踪控制[J]. 东南大学学报:自然科学版, 2012, 42(S1): 203-207.
DUAN Haiqing, JIA Heming, ZHOU Jiajia, et al. Bottom following control for underactuated AUV based on neural network[J]. Journal of southeast university, 2012, 42(S1): 203-207.
[5]贾鹤鸣, 宋文龙, 周佳加. 基于非线性反步法的欠驱动AUV地形跟踪控制[J]. 北京工业大学学报, 2012, 38(12): 1780-1785.
JIA Heming, SONG Wenlong, ZHOU Jiajia. Bottom following control for an underactuated AUV based on nonlinear backstepping method[J]. Journal of Beijing university of technology, 2012, 38(12): 1780-1785.
[6]JIA Heming, ZHANG Lijun, BIAN Xinqian, et al. A nonlinear bottom-Following controller for underactuated autonomous underwater vehicles[J]. Journal of central south university, 2012, 19(5): 1240-1248.
[7]王芳, 万磊, 李晔, 等. 欠驱动AUV的运动控制技术综述[J]. 中国造船, 2010, 51(2): 227-241.
WANG Fang, WAN Lei, LI Ye, et al. A survey on development of motion control for underactuated AUV[J]. Shipbuilding of China, 2010, 51(2): 227-241.
[8]BROCKETT R. W. Asymptotic stability and feedback stabilization[J].Differential geometric control theory, 1983, 27: 181-191.
[9]FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. New York: John Wiley and Sons Ltd, 2011: 1-31.
[10]SILVESTRE C, CUNHA R, PAULINO N, et al. A bottom-following preview controller for autonomous underwater vehicles[J]. IEEE transactions on control systems technology, 2009, 17(2): 257-266.
[11]MELO J, MATOS A. bottom estimation and following with the MARES AUV[C]//Proceedings of 2012 Oceans. Hampton Roads, VA, 2012: 1-8.
[12]ADHAMI-MIRHOSSEINI A, YAZDANPANAH M J, AGUIAR A P. Automatic bottom-following for underwater robotic vehicles[J]. Automatica, 2014, 50(8): 2155-2162.
[13]马骋, 连琏. 水下运载器操纵控制及模拟仿真技术[M]. 北京: 国防工业出版社, 2009: 29-33.
[14]陈子印. 欠驱动无人水下航行器三维路径跟踪反步控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2013. CHEN Ziyin. Research on three-dimensional path- following backstepping control of underactuated unmanned underwater vehicle[D]. Harbin: Harbin Engineering University, 2013.
[15]MOREIRA L, SOARES C G. H2and H∞designs for diving and course control of an autonomous underwater vehicle in presence of waves[J]. IEEE journal of oceanic engineering, 2008, 33(2): 69-88.
[16]HUANG Xianqing, LIN Wei, YANG Bo. Global finite-time stabilization of a class of uncertain nonlinear systems[J]. Automatica, 2005, 41(5): 881-888.
[17]李殿璞. 船舶运动与建模[M]. 2版. 北京: 国防工业出版社, 2008: 37-42.
本文引用格式:
严浙平,于浩淼,李本银,等. 基于积分滑模的欠驱动UUV地形跟踪控制[J]. 哈尔滨工程大学学报, 2016, 37(5): 701-706.
YAN Zheping,YU Haomiao,LI Benyin, et al. Bottom-following control for an underactuated unmanned underwater vehicle using integral sliding mode control[J]. Journal of Harbin Engineering University, 2016, 37(5): 701-706.
Bottom-following control for an underactuated unmanned underwater vehicle using integral sliding mode control
YAN Zheping,YU Haomiao,LI Benyin,ZHOU Jiajia
(College of Automation, Harbin Engineering University, Harbin 150001, China)
Abstract:The bottom-following problem of an underactuated unmanned underwater vehicle (UUV) is discussed with consideration of the effects of parameter perturbation and external disturbances. A bottom-following control law based on the backstepping method and integral sliding mode control (ISMC) is presented, which eliminates parameter perturbations and external disturbances. First, the bottom-following error equations were established using the kinematic properties of the vehicle and the local Serret-Frenet Frame. Then, the kinematic control law (guidance law) and dynamic control law were developed based on the backstepping method and ISMC. Thus, the closed-loop motion system under the proposed control law was proven to have global finite-time stability. These simulation results show that the bottom-following mission can efficiently be achieved, and there is strong robustness to the parameter perturbations and external disturbances.
Keywords:underactuated UUV; bottom-following; parameter perturbations; finite-time stability; integral sliding mode control;backstepping method
收稿日期:2014-12-08.
基金项目:国家自然科学基金资助项目( 51179038); 新世纪优秀人才计划资助项目( NCET-10-0053).
作者简介:严浙平(1972-), 男, 教授,博士生导师. 通信作者:严浙平, E-mail:yanzheping@hrbeu.edu.cn.
DOI:10.11990/jheu.201412020
中图分类号:TP242.6
文献标志码:A
文章编号:1006-7043(2016)05-0701-06
网络出版时间:2016-04-11.
猜你喜欢
导航定位学报(2022年2期)2022-04-11
疯狂英语·新读写(2021年6期)2021-08-05
中国惯性技术学报(2019年6期)2019-03-04
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
北京航空航天大学学报(2017年4期)2017-11-23
中学生英语(2017年6期)2017-07-31
青年歌声(2017年6期)2017-03-13
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
