欠驱动板球系统的自适应模糊滑模控制
2016-06-22 07:55苏和堂
滁州学院学报 2016年2期
苏和堂
欠驱动板球系统的自适应模糊滑模控制
苏和堂
摘要:针对板球系统中存在的非线性、欠驱动等特点,提出了一种自适应模糊滑模控制方案。首先根据板球系统的数学模型设计等效滑模控制律;其次为了消除等效滑模控制的抖振现象,利用自适应模糊滑模控制算法模糊逼近等效滑模控制系数以实现小球期望运动的鲁棒跟踪,保证轨迹误差在有限时间内收敛于零;最后通过Lyapunov理论严格证明了控制系统的稳定性。仿真和实验结果表明自适应模糊滑模控制能有效地改进球板系统的轨迹跟踪性能。
关键词:自适应模糊滑模控制;等效滑模控制;欠驱动系统;球板系统
板球系统(Ball and Plate System)是一个典型的多变量、不确定、强耦合的非线性欠驱动动力学系统,是球杆系统(Ball and Beam System)的二维扩展,具有时变、时间延迟等特性,故很难建立精确数学模型。自适应控制、模糊控制、滑模控制、反演设计法和神经网络等现代控制技术对因无精确数学模型而难以建立准确控制的系统具有良好的控制效果[1]。
国内外许多学者针对板球系统的非线性欠驱动特征,进行了大量的研究,取得许多重要的成果。滕树杰等依据分层模糊控制器的表达式,提出了设计参数的模型参考自学习方法以解决板球系统的轨迹跟踪问题[2]。BAI Ming等通过研究基于反馈线性化的板球系统智能切换控制来确保全局稳定性[3]。D.LIU等从补偿不确定项的角度,采用滑模控制和不确定项观察补偿算法研究板球系统的轨迹跟踪问题[4]。Miad Moarref等将滑模控制和监督模糊控制相结合以控制板球系统的轨迹跟踪[5]。Yeong-Hwa Chang等将蚁群算法运用于解耦的模糊滑模控制算法中,实现了球杆系统的控制策略[6]。
针对板球系统的数学模型,本文提出了一种自适应模糊滑模控制方案。该方案在抑制外部扰动和消除抖振现象的同时,能促使小球运动轨迹误差在有限时间内收敛于零。
1板球系统的数学模型
板球系统是一个2输入2输出具有8个状态变量的非线性欠驱动系统,其结构如图1所示[4]。从图中可知,小球在平板上的运动轨迹由摄像机实时采集并反馈给控制系统。
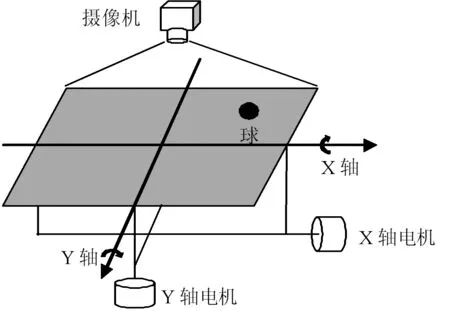
图1板球系统结构简图
板球系统的数学模型由欧拉-拉格朗日方程推出:
(1)



(2)

因在板球系统中,一般对小球的运动提出了只有滚动而无滑动的约束条件,即平板转动的角速度必须足够小(式(2)中x4x5x8和x1x4x8两项可以忽略),故系统可以近似分解成两个完全独立的相同控制系统(相互垂直的x方向和y方向两个子控制系统)。为此本文仅以x方向为例研究板球系统的自适应模糊滑模控制器。
解耦的x方向和y方向的状态方程分别是:
(3)
(4)
将式(3)变换成标准形式[10]:
(5)
(6)
为了保证x1→xd(x1为摄像机采集的小球运动实际位置,xd为小球运动期望位置),式(6)必须满足以下前提条件[10]:


前提3当x3→0和x4→0时,f1(0,0,x3,x4)→0。
2滑模控制设计
为了保证小球的运动轨迹误差在有限时间内收敛于零,滑模控制的切换函数设计如下:
s=c1e1+c2e2+c3e3+e4
(7)
式中:ci>0,i=1,2,3是常数。s的导数:
(8)
令误差方程为:
(9)
对式(9)求导得:
(10)
等效滑模控制律设计为:
(11)
式中:ueq是等效控制;usw是切换控制;k≥0是等效滑模控制系数。
将式(6)和式(10)代入式(8)得:
(12)
假定切换控制usw为:
(13)

定义Lyapunov函数:
则
(14)
3自适应模糊滑模控制器设计
等效滑模控制的鲁棒性由切换控制usw保证,但控制中所产生抖振现象的原因也是由usw产生的。为了消除抖振现象,通过自适应模糊滑模控制对式(11)的k进行模糊逼近以促使usw足够小进而消除抖振现象。
设计模糊推理规则:
(15)

采用乘积推理机、单值模糊器和中心平均解模糊器设计模糊系统,得模糊系统的输出:
(16)
(17)
(18)

自适应律设计为:
(19)
式中:γ>0是一常数。
(20)
将式(16)代入式(11)中得自适应模糊滑模控制律:
(21)
证明:定义最优参数为:

(22)
将式(12)和式(13)代入式(22),得:


(23)
假设
(24)
选取Lyapunov函数为:
(25)
则
从而证明自适应模糊滑模控制是稳定的且在有限时间内逐渐收敛于s=0处。
4仿真和实验结果
板球系统实验平台采用深圳元创公司的板球系统如图2所示。

图2板球系统实验平台
为了验证板球系统的自适应模糊滑模控制算法,仿真对比实验采用深圳元创公司的板球系统数据并在Matlab平台上进行。板球系统参数:m=0.11kg,R=0.02m,g=9.81m/s2,b=1,J=1.76×10-5kg·m2;切换函数s的参数:c1=27,c2=27,c3=1;切换控制usw的参数: ρ=
1,λ=1;s的模糊隶属函数




(26)
式中:Δ=0.05是饱和函数的边界层厚度。
仿真对比实验设定的目标轨迹为“∞”字形路径轨迹[11]:
(27)
为验证控制系统的性能,令式(13)中的β分别取三个不同值:β=0.5、β=1和β=1.5。从图2~图4可知:虽然在传统滑模控制下,小球的位置和速度跟踪精度随着β值的增加而逐渐改善,但始终低于同一β值下的自适应模糊滑模控制的跟踪精度,并且自适应模糊滑模控制在β取上述三个值中任意一值时都很好地实现了小球的位置和速度跟踪,而传统滑模控制在β取较小值时,小球的位置和速度跟踪精度出现了较大的波动现象。
5结论
针对板球系统实验平台,提出了自适应模糊滑模控制方案并与传统滑模控制方案进行仿真对比和实验研究,研究结果表明本文所设计的系统在取不同的β值时,不仅能实现系统的高精度轨迹跟踪,而且还具有较好的动态响应性能、抗干扰能力和较强的鲁棒性,并能有效地消除控制信号中的抖振现象。
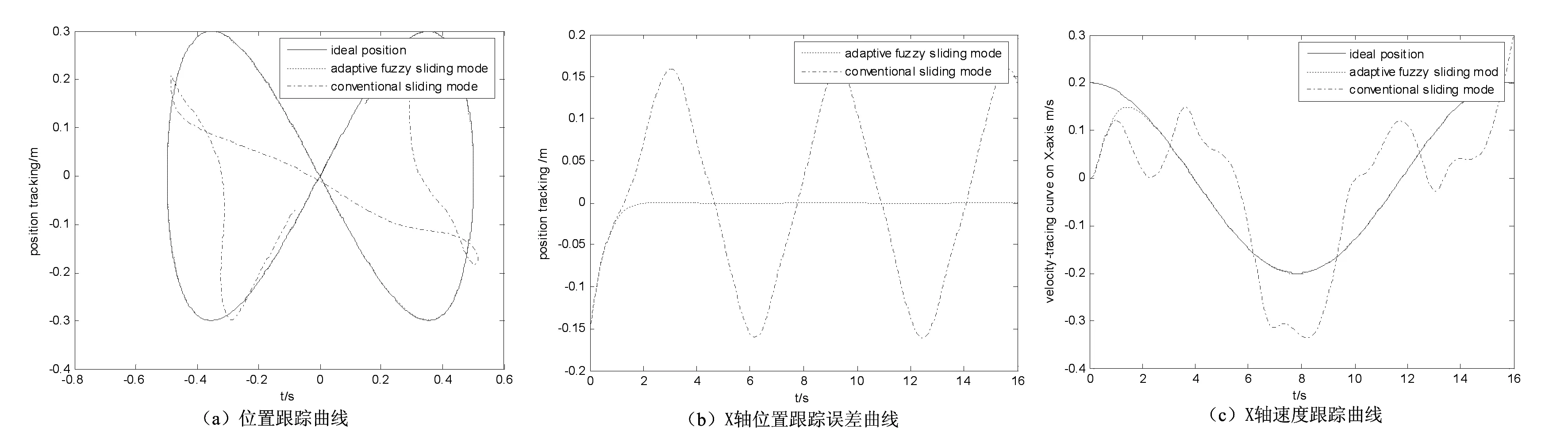
图3自适应模糊滑模与传统滑模性能比较(β=0.5)
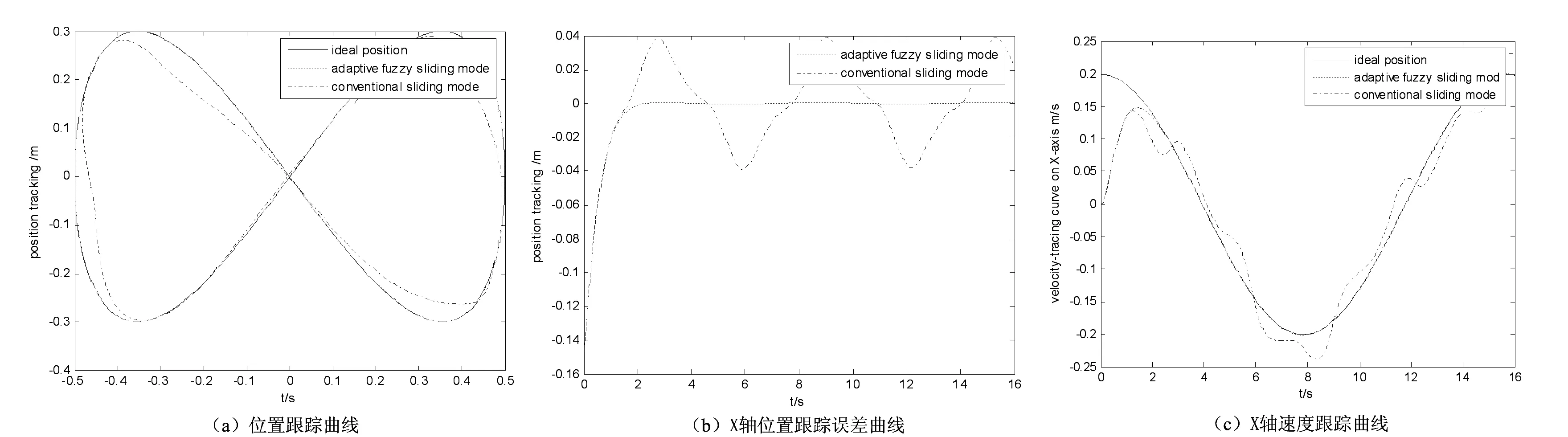
图4自适应模糊滑模与传统滑模性能比较(β=1)
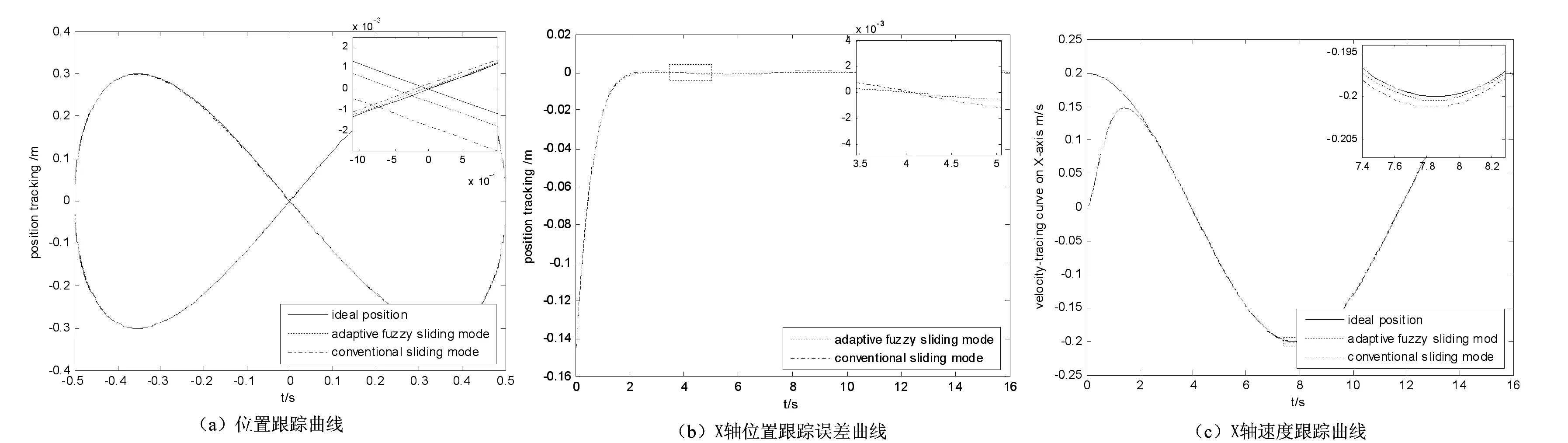
图5自适应模糊滑模与传统滑模性能比较(β=1.5)
[参考文献]
[1]朱齐丹,于瑞亭,夏桂华等.风浪流干扰及参数不确定欠驱动船舶航迹跟踪的滑模鲁棒控制[J].控制理论与应用,2012,29(7):959-964.
[2]滕树杰,张乃尧.分层模糊控制器的解析表达式及自适应控制方法[J].清华大学学报(自然科学版),2002, 42(9):1248-1252.
[3]BAIMing,TIAN Yantao, WANG Yongxiang. Intelligence Switching Control of Ball and Plate System Based on Feedback Linearization[C].Proceedings of the 30th Chinese Control Conference,2011:688-693
[4]D. LIU, Y. TIAN, H. DUAN. Ball and Plate Control System based on sliding mode control with uncertain items observe compensation[C].IEEE International Conference on Intelligent Computing and Intelligent Systems, 2009,2:216-221
[5]Miad Moarref, Mohsen Saadat, Gholamreza Vossoughi. Mechatronic Design and Position Control of a Novel Ball and Plate System[C]. IEEE 16th Mediterranean Conference on Control and Automation, 2008:1071-1076
[6]Yeong-Hwa Chang, Chia-Wen Chang, Chin-Wang Tao,et al. Fuzzy sliding-mode control for ball and beam system with fuzzy ant colony optimization[J]. Expert Systems with Applications, 2012, 39(3): 3624-3633.
责任编辑:王与
中图分类号:TP273
文献标识码:A
文章编号:1673-1794(2016)02-0044-05
作者简介:苏和堂,滁州职业技术学院副教授(安徽 滁州 239000)。
收稿日期:2015-11-07