一种左心室辅助装置流量控制系统的仿真实验
2016-06-20 01:58:44作者王宗涛靳立军颜世平傅泽粮广东药学院附属第一医院广州市50080广东省人民医院广东省心血管病研究所广东省医学科学院广州市50080湖南埃普特医疗器械有限公司湘潭市4400
中国医疗器械杂志 2016年2期
【作者】王宗涛,靳立军,颜世平,傅泽粮 广东药学院附属第一医院,广州市,50080 广东省人民医院,广东省心血管病研究所,广东省医学科学院,广州市,50080 湖南埃普特医疗器械有限公司,湘潭市,4400
一种左心室辅助装置流量控制系统的仿真实验
【作者】王宗涛1,靳立军2,颜世平3,傅泽粮3
1 广东药学院附属第一医院,广州市,510080
2 广东省人民医院,广东省心血管病研究所,广东省医学科学院,广州市,510080
3 湖南埃普特医疗器械有限公司,湘潭市,411400
【摘 要】目的 检测新研发的新型经皮插入式左心辅助装置流量控制系统的准确性、可靠性、稳定性。方法 应用AMEsim软件建立仿真模型,分别调节心脏和左心房的节流阀大小,分析模型中电机转速、流量和压力变化,并结合体外模拟实验,验证模型准确性。结果 仿真实验中,电机转速能随A阀大小变化而改变,泵的流量也随之改变,泵出口压力维持在1.1×105Pa~1.2×105Pa。B阀大小的改变,也能早期识别及改变电机转速,自动调节流量,泵入口压力维持在-0.25×105Pa 至-0.10×105Pa。体外实验中,随A阀、B阀大小的改变,泵可通过电压改变实现自身调节,维持泵出入口压力的相对稳定,最终实现流量控制。结论 通过增设压力传感器控制电机的转速,可精确控制流量,稳定性强,响应速度快。
【关 键 词】左心室辅助装置;流量控制;仿真分析
0 引言
根据《中国心血管病报告2013年》[1],由于心血管病危险因素的流行,我国心血管病的发病人数仍在持续增加,相当于每5个成年人中就有1个心血管病患者。无论是高血压、冠心病、心律失常,最终都逃不过心力衰竭的终末期,而患者生活质量也因此受到严重困扰,甚至危及生命。随着循证医学的发展,药物对心力衰竭患者治疗的局限性受到了大家的关注,新型的辅助装置对心力衰竭患者的治疗开始受到重视,尤其在应对急性心力衰竭方面,单纯药物治疗的疗效非常有限。心脏辅助装置作为一种心力衰竭的治疗方法,近年来受到了大家的关注。左心辅助装置(Left Ventricular Assist Devices, LVAD)作为一类新型的辅助装置,一些临床研究证实了其有效性。其原理是利用泵血装置驱动左心室的血液流入主动脉,可部分或完全替代心脏泵血功能,维持患者的血液循环。自从1962年DeBakey和Liotta报道的启动隔膜血泵发展至今,左心室辅助装置已经衍生出多个产品,如主动脉内球囊反搏(IABP)、Tandem Heart系统、Impella系统、Ecmo系统等。其中,连续性泵血装置(Impella系统)是目前临床应用较多的左心室辅助装置[2],其经皮植入的方式使其在临床操作中有很大的优势,但其昂贵的费用,使国内临床使用受到限制。本研究所涉及的左心辅助装置是一种自主研发的经皮植入式左心辅助装置,拟通过模拟测试与体外测试,实现对左心辅助装置流量更为精确和有效的控制,并最终实现经皮植入式左心辅助装置的国产化。
关于精确控制流量的问题,早在1898年,德国生物学家Otto Frank就提出了著名的弹性腔(Windkessel)模型[3],从此,利用心血管建模仿真得到迅速发展,后来建模成为解决精确控制心室辅助装置的有效途径。常用模型有物理模型、动物模型和数学模型,其中的数学模型方法因可通过变量参数反应血流变化情况,发展尤为突出,如电网络模型、系统辨识方法、有限元分析法、键合图法等[4[5]。随着生物医学工程学的发展,专家控制、神经网络[6]、模糊控制等智能控制也应用到左心室辅助设备中来,缺点是专家控制和神经网络都需要训练样本量,无法选取通用的样本量,而且模糊控制响应速度慢[7]。根据临床应用实践,在临床手术时,压力是关键参数,所以,在左心室辅助导管上增加压力传感器,采集压力信号,利用压力信号与电机转速、流量之间的关系,控制血泵电机的转速,从而可有效控制流量。前期的研究已经证实了左心辅助装置在体外实验及动物实验中的有效性和可操作性[8]。
1 左心室辅助系统
左心室辅助系统包括:导管、轴流泵、压力传感器、控制系统,接口,其结构如图1所示。压力传感器B固定在猪尾导管上,由信号线通过导管连接到接口上,工作时位于左心室内;压力传感器A固定在导管近端,也由信号线通过导管连接到接口上,工作时位于主动脉内。压力传感器B和压力传感器A位于轴流泵的两边。轴流泵通过信号线连接到接口。
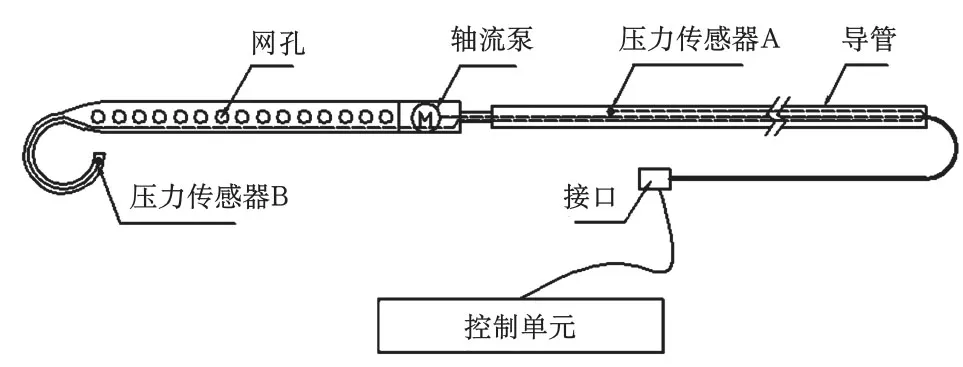
图1 左心室辅助装置结构Fig.1 The structure of LVAD
控制原理:工作时,导管经皮植入,远端有网孔部分置于左心室内,轴流泵置于主动脉瓣位置,近端置于主动脉内,接口外接控制系统。将左心室内血液通过导管远端上的网孔吸入导管内,再从轴流泵出口将血液排出到主动脉内,实现辅助供血,形成压力。压力传感器A和B采集压力信号,根据信号大小,输入轴流泵驱动信号,驱使轴流泵旋转,通过设置控制系统,可预设定压力传感器A的值,也可直接输入轴流泵电流控制转速,从而可根据患者的实际情况,如睡眠阶段或患者体格较小时,适当降低流速,见图2。

图2 控制原理图Fig.2 Control schematic
为解决轴流泵抽吸力度过大,导致左心室结构及功能受损;或主动脉压力过高,形成高血压;同时,为解决轴流泵抽吸力度过小,导致血压偏低,无法起到辅助循环的作用,所以,在压力传感器B和A设定合适压力,该压力依据数据模型相关参数设定[9],同时考虑到大气压,设收缩压1.173×105Pa(880 mmHg)为理想值,低于1.133×105Pa(850 mmHg)为低血压,电机需加快转速,高于1.2×105Pa(900 mmHg)为高血压,电机需减慢转速,建立函数如下:

为防止心脏壁贴合网孔,心室内压强不低于大气压1.013×105 Pa(760 mmHg),以大气压为基准,建立函数如下:

2 仿真模型
为实现左心室辅助设备抽吸速率可自动调节,在心室和主动脉间建立合理的血液流量。预设某成年患者,突然心跳停止,根据成人正常心跳时所需血量为5 L/min,用AMEsim软件建立模型(图3)。
根据人体血液特性,相关参数设置见表1[9]。

图3 模型结构图Fig.3 The structure of model

表1 液体特性Tab.1 The characteristic of blood
轴流泵采用1 mL/转,电机选用可调速电机,主信号设为单位阶跃信号。根据正常人体所需流量5 L/min,电机正常转速为5 000 r/min。在泵的输出端设立压力传感器A和可控节流阀A,可控节流阀A模拟不同人体的动脉血管特征。在泵的输入段放置压力传感器B和可控节流阀B,可控节流阀B模拟人体的左心室压力特性。将式(1)、式(2)、表1中的参数写入模型,执行仿真。
模拟工作流程:当输入初始阶跃信号5 000时,可调速电机接收5 000信号,转换为电机转速5 000 r/min,驱动泵旋转,理论输出流量为5/min。在泵抽吸端(模拟左心室内),受抽吸负压,形成负压腔,压力传感器加压力信号经传感器B反馈到可调速电机的信号输入端。在泵的排出端(模拟主动脉),液体经过管道和节流阀A形成正压,经传感器A反馈到可调速电机的信号输入端。初始阶跃信号、信号A、信号B共同控制可调速电机旋转,直到达到平衡值,实现自主控制。
为查看电机自动调控情况,设置初始输入量为5 000,可控节流阀A和B的输入信号为阶跃函授,控制节流阀开孔从小到大,再从大到小的变化过程,仿真结果如下:
图4中,输入信号保持不变,当B口压力值固定时,调节压力大小,电机能自动调节转速,并最终维持A处压力恒定。同理,反应了随着A、B处信号固定时的变化,调节压力大小,电机能自动调节转速,并最终维持B处压力恒定。从响应曲线可知:系统可通过检测A、B处压力的改变,通过流量的调节,最终实现电机转速的自动控制,并维持其压力恒定。即系统可自动识别A、B处压力变化,最终实现流量的控制。
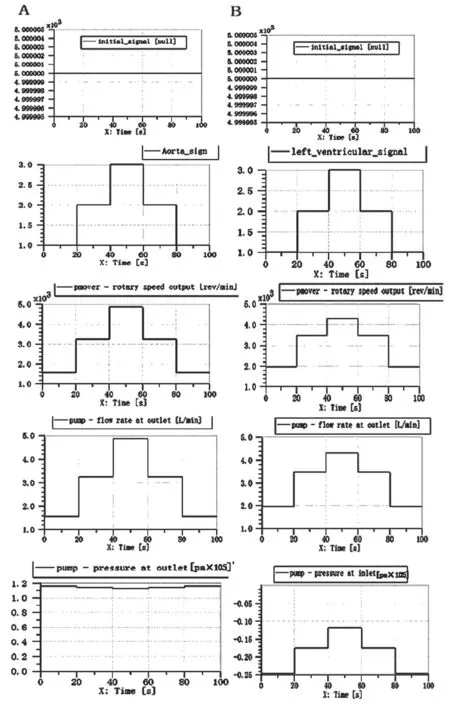
图4 随着输入信号的改变,A、B阀处压力的变化Fig.4 The A and B valve pressure change with the variation of signal
3 体外模拟实验
为进一步验证控制系统的可行性,选用甘油和水的混合物模拟人体血液,选用改进的左心室辅助导管,导管近心端网孔段用大硅胶管套住,靠近轴流泵处密封,另一端接球阀A和压力表A,并侵入盛有甘油和水的混合物容器中;导管远心段(轴流泵出口)同样用大硅胶管套住,轴流泵一端密封,在硅胶管上开个小孔过导管,硅胶管另一端接球阀B和压力表B,抽出液体体积用量筒测量。接通控制器电源(额定电压为36 V),控制器通过接头与左心室辅助导管连接,控制电机旋转。
设定电机初始输入信号为36 V,然后调节开关A口大小,实现压力的调节,此时开关B全开,记录相关数据;同样的方法实现对B口大小的调节,实现压力控制,并记录相关数据,详见表2。

表2 压力改变与流量测定值(n=15)Tab.2 The variation of pressure and fl ow(n=15)
A、B口大小不同所导致的压力值之间比较达到统计学差异,因A、B口压力变化所导致左心辅助装置流量改变的大小亦有统计学差异。
4 讨论
安全、有效是医疗器械临床应用的基础,最大限度增加左心室辅助器械的安全性、有效性是目前临床应用的目标。因此,针对临床不同需求,左心辅助装置应具备相应的调节能力,在治疗的同时尽量减少并发症的发生。本研究通过仿真模拟实验和体外实验,拟提高自主研发的左心辅助装置的安全性和有效性。
目前,广泛应用于临床的心脏辅助装置,其流量控制的原理大致可分为基于心率和基于血压两种类型。因缺乏对辅助装置的监控,或因其对左心辅助装置检测的相关指标灵敏度受限等问题,无法满足临床需求[10]。本研究通过改进左心室辅助装置和系统,在传统左心室辅助装置的导管上增加压力传感器,外接控制系统,将压力信号输入控制系统并用数学模型处理信号,再用处理后的信号控制电机转速,最终控制流量。除了能监测血压心率之外,通过对左心辅助装置本身的压力检测,更好地实现对流量的管理。利用AMEsim软件和数学模型进行仿真,验证了该方法的可行性。仿真实验中,通过对信号的改变,即实现左心辅助装置出血口与入血口压力的改变,最终实现对流量的控制。图4中可见,当出入血口压力变化时,电机可自动识别压力的变化,并调节电机转速,从而实现流量的控制,同时维持相对恒定的压力。这充分证明了该控制系统的可行性。
对于仿真实验的结果,拟通过体外实验验证其可行性及有效性。体外实验中,通过改变出入口的大小,实现压力控制,传感器识别压力控制系统后,仍可以自主调节转速,并最终对流量进行调节。该实验结果表明,左心辅助装置的控制系统可精确控制流量,并维持压力相对恒定,其方法简单实用,具有简单、响应速度快、稳定性强的特点,可提高左心室辅助装置临床应用的安全性和有效性。
5 结论
仿真模拟实验和体外模拟实验过程中均证实了控制系统的良好效果,再通过进一步的动物实验和临床实验再次验证该控制方法的有效性并加以改进,希望此LVAD成为一种精确度高、灵敏度高的心脏辅助控制装置。
参考文献
[1] 国家心血管病中心.中国心血管病报告2013[R]. 临床荟萃, 2015(10): 1091.
[2] 刘苓苓. 叶轮式左心室辅助装置LVAD的仿生控制理论研究[D].镇江: 江苏大学, 2012.
[3] 鄂珑江, 吴效明, 胡玉兰. 心血管系统建模的研究进展[J]. 现代生物医学进展, 2008, (8): 1545-1548.
[4] 冯忠刚, 吴望一. 心血管系统体循环后负荷的集中参数模型[J].中国生物医学工程学报, 1997, (3): 212-218.
[5] 刘信, 刘晓军, 蔡玉文. 基于模糊免疫PID的左心室辅助装置控制系统仿真[J]. 计算机与数字工程, 2014, 42(2): 190-192.
[6] Liang F, Liu H. Simulation of hemodynamic responses to the valsalva maneuver: an integrative computational model of the cardiovascular system and the autonomic nervous system[J]. J Physiol Sci, 2006, 56(1): 45-65.
[7] 王芳群, 王志宾, 吴雯珏, 等. 左心室辅助装置控制系统的建模与仿真[J]. 微特电机, 2013, 41(7):15-17.
[8] 王宗涛, 靳立军, 严红, 等. 一种经皮植入式左心辅助装置的流量,溶血及植入性实验研究[J]. 岭南心血管病杂志, 2014, 20(6): 770-773.
[9] 陈珺. 人体血液流动的物理特性[J]. 物理教学, 2008, (5): 64-65.
[10] 张涛, 胡兆燕, 陈正龙, 等. 心脏辅助与替代装置中血泵的控制及监测方法[J]. 中国医疗器械杂志, 2013, 37(6): 432-436.
The Simulation Experiment of Control System for Left Ventricular Assist Device
【Writers】WANG Zongtao1, JIN Lijun2, YAN Shiping3, FU Zeliang3
1 The First Affi liated Hospital of Guangdong Pharmaceutical University, Guangzhou, 510000
2 Guangdong People’s Hospital, Guangdong Cardiovascular Institute, Guangdong Academy of Medical Science, Guangzhou, 510080
3 Hunan Access Point Medical Devices Co. Ltd., Xiangtan, 411400
【Abstract】Objective To test the accuracy, the reliability and the stability of fl ow-controlling method of a new percutaneous left ventricular assist device. Methods With the AMEsim to set up a simulation model, analysis the variations of motor speed, flow and pressure by adjusting the size of valve. and we test the improved-theoretical model with outside experiment. Results In the simulation experiment, with the variations of pressure from A, the system can regulate the motor speed to maintain the pump outlet pressure 1.1×105Pa~1.2×105Pa and control the fl ow. With the B valve size changes, the fl ow-controlling by the system identify and change the motor speed, to maintain the pump inlet pressure from -0.25×105Pa to -0.10×105Pa. In outside experiment, with the variations of the size of valve A and valve B, the pump can change the voltage by self-regulation, maintain the entrance and exit of pressure is relatively stable and control the fl ow. Conclusions It is a fast-responding and better robust way, by adding the pressure sensor to adjust the speed of motor, to control the fl ow accurately.
【Key words】left ventricular assist device, fl ow controlling, simulation
【中图分类号】R318.6
【文献标志码】A
doi:10.3969/j.issn.1671-7104.2016.02.021
文章编号:1671-7104(2016)02-0143-04
收稿日期:2015-04-16
基金项目:广东省科技计划资助项目(2011A030300001)
通信作者:靳立军,E-mail:lijun-jin@163.com
猜你喜欢
水泵技术(2022年1期)2022-04-26 14:20:04
防爆电机(2021年5期)2021-11-04 08:16:40
昆明医科大学学报(2021年4期)2021-07-23 01:22:00
中国生物医学工程学报(2019年5期)2019-07-16 07:56:44
设备管理与维修(2016年6期)2016-03-16 02:22:09
中外医疗(2015年16期)2016-01-04 06:51:39
山东医药(2015年38期)2015-12-07 09:12:28
医学研究杂志(2015年12期)2015-06-10 06:57:46
医学研究杂志(2015年4期)2015-06-10 06:42:43
河南科技(2014年4期)2014-02-27 14:07:12