
基于SADOA和TDOA的双模数据融合定位研究*
2016-06-16 08:53赵全军张媛媛张志森涂朴
广东通信技术 2016年5期
[赵全军 张媛媛 张志森 涂朴]
基于SADOA和TDOA的双模数据融合定位研究*
[赵全军 张媛媛 张志森 涂朴]
摘要文章结合双模终端的特点对传统的数据融合模型进行了一定的改变,选择了双模终端能获得的到达信号强度差(SADOA)和到达时间差(TDOA)等测量参数,并给出了一种三层定位数据融合模型,并将其应用于基于双模终端的定位中,通过假想终端位于小区中的近、中、远三个位置区域进行仿真分析验证了其性能。
关键词:双模终端到达时间差数据融合到达信号强度差
赵全军
男,硕士研究生学历,2008年毕业于重庆邮电大学通信与信息系统专业,现为四川文理学院物理与机电工程学院教师。主要从事电子信息专业的教学和科研工作,研究方向:移动通信技术、OFDM、无线资源管理以及WIMAX网络等。
张媛媛
四川文理学院,物理与机电工程学院。
张志森
四川文理学院,物理与机电工程学院。
涂朴
四川文理学院,物理与机电工程学院。
引言
在蜂窝移动通信系统中,系统对终端的定位通常采用TDOA、TOA、SOA和AOA等多种定位技术来估计移动终端的位置。进二十年来学术界对定位技术做了大量的研究,不同的技术由于应用场景不同都存在自身的缺点。由
当双模终端收到临近三个或三个以上基站的信号时,可以测量到较多的定位参数,可以采用多参数数据融合方法来进行定位。基于到达信号强度差(SADOA)的定位就是以多个基站位置为参照,通过测量移动终端到达多个不同基站的信号强度差值来估算出终端的具体位置。和到达时间差定位算法(TDOA)和信号到达角度定位算法等方法相比,基于信号强度定位方法易于实现,且对现有通信系统的设备影响较少,成本较低。
1 基于SADOA/TDOA的混合定位方法
混合的TDOA/SADOA定位算法的核心就是线性化SADOA和TDOA的测量方程。我们采用文献[10]中提出的LOP方法,来得出移动终端的估计位置。通过分析可以看出,移动终端位于以移动终端到两个基站的距离比定义的圆上:

其中。



根据上节所得的TDOA线性化矩阵,构造多用户情况下的混合方法的线性矩阵,可得:


2 基于SADOA和TDOA的双模数据融合定位
当双模终端同时收到来自三个或三个以上基站的信息时,就可以SOA定位算法得到该位置下的信号强度值,然后通过计算不同基站间的到达信号强度差值得到SADOA值;通过测量达到时间差定位算法可得到应需要的测量参数。假设每个终端模块都可以收到三个或三个以上基站的信息,则每个模块都可以得到一个定位结果,然后通过加权处理把TD-SCDMA模块得到的定位结果和CDMA2000模块得到的定位结果进行融合,就可以得到相对更加准确的定位结果。下面详细介绍其过程。
2.1数据融合模型
结合双模终端的特点,对Kleine-Ostmann模型[11]进行了一定的改变,给出了基于到达时间差和到达信号强度差的数据融合模型,如图1,在融合模型中,CELL-ID主要作为先验信息。模型的主要特点有:
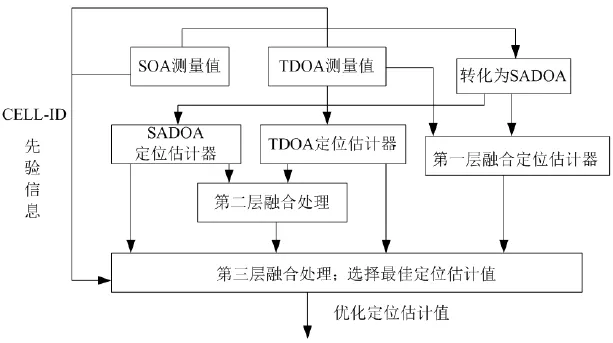
图1 多基站情况下数据融合模型
① 该融合定位技术首先基于2种基本的定位技术,即SOA定位和TOA定位。系统根据这两个技术得到被定位终端到周围基站的信号到达强度值和信号达到时间,通过系统的进一步计算得出终端到达各个基站的型号强度差和信号到达时间差,通过系统进一步估计最终得得三种估计值:SADOA、TDOA、SADOA/TDOA。
② 第一层融合
由SOA定位算法得到所测参数通过转化得到的SADOA数据,将SADOA数据与TDOA算法测得的数据按照文献[2]的融合技术进行处理,进一步得到SADOA/ TDOA融合后的数据。
③ 第二层融合
将SADOA与TDOA的定位结果(方差,均值)分别采用贝叶斯推论按方差加权,产生1种新的定位估计值。

④ 第三层数据融合
第三层融合处理SADOA测得值、第一层估计结果、第二层估计结果进行再一次融合出来,选择最恰当的位置估计作为系统模型输出。在第三层的融合估计中主要考虑的因素有:基站几何位置的先验信息,对各估计器输出的观测值,误差分布的概率等。一般地说,系统可将具有最小方差的估计认为是最可靠的估计值,但第三层的选择不仅要考虑到方差值,还应考虑MS靠近不同基站过程信号质量相对较差的情况,这是可能具有最小方差的估计也不予与考虑。
2.2双模定位的数据融合
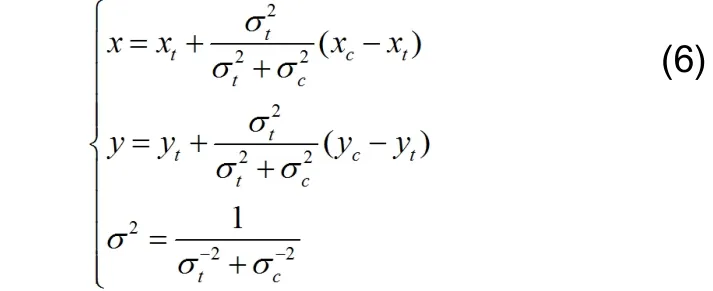
假定通过第三层数据融合处理,TD-SCDMA模块得到的定位结果的均值为,方差为,CDMA2000模块得到的定位结果所得的方差为、均值为。分别将两个系统得到的均值和方差采用贝叶斯推论按如下公式(6)方式进行方差加权,可得双模终端最终的定位结果。加权方程为:
3 仿真结果
为了验证算法的性能,我们仿真的网络布局采用理想的正六边形蜂窝结构,如图2。BS1作为服务基站,基站BSi(i=2,3,4,5,6)作为定位信息基站,相邻两基站距离2R。其中R为小区半径,当小区半径为1m时,七基站坐标分布如下:BS1:(0,0)、BS2:(0,)、BS3:(-1.5,)、BS4:(-1.5,)、BS5:(0,)、BS6:(1.5,)、BS7:(1.5,)。为了便于仿真分析,我们假设移动终端位置固定在服务基站所在的小区中。
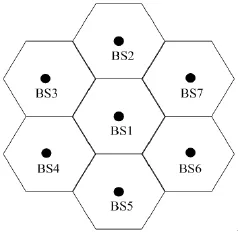
图2 基站分布图
在仿真中,假设小区半径为2km,由系统造成的测量误差服从均值为0,标准差为60m的高斯分布。信道环境为繁华市区环境,非视距误差服从指数分布[12],指数分布概率密度函数为:

数据融合模型过程中,连接终端MS的服务BS及临近2个BS完成终端的各种参数值的测量。当终端MS提出一次定位请求时,假定可以对各种测量值进行200次测量,再分别按不同的定位方法和融合方法,产生SADOA、TDOA、第一层融合数据(1f)、第二层融合数据(2f)共4种定位估计值,供第三层融合进行最佳选择。为了分析MS在小区内所处的位置不同会对融合技术造成的影响。在性能分析过程中,我们重点考察MS靠近服务BS附近,即(50,50);MS与服务基站距离接近小区半径一半位置,即(500,)和MS靠近小区边界位置,即(800,550)三个典型位置系统性能,得出融合模型中四种定位估计值的平均定位误差、均方根误差RMSE的概率等,并对他们进行了比较分析。从图1的模型框图我们容易看出,融合系统的整体定位输出是根据SADOA、TDOA、第一层融合数据(1f)、第二层融合数据(2f)四个估计值中选择最优的作为最终定位结果的输出。
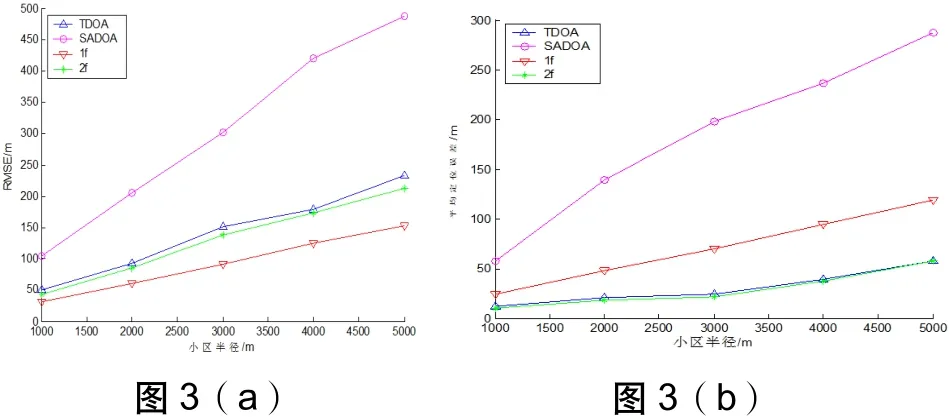
图3 MS靠近BS附近时的性能比较
图3的两图分别是MS靠近服务BS(50,50)时模型中得到的四种估计值的平均定位误差和均方根误差RMSE的概率。从图3(a)中可以看出,通过第一层和第二层融合后的数据比直接得到的定位数据在均方根误差RMSE的更优,尤其是第一层融合后的均方根误差优于其他三种。从图3(b)中虽第一层融合后的定位精度比第二层或者TDOA略低,但是差别不大,而且第一层融合后的线性更好,因此当MS靠近服务BS(50,50)附近时,定位结果可以选择第一层的数据融合结果。

图4 MS与服务BS距离接近小区半径一半位置时的性能比较
图4的两图分别是MS与服务BS距离接近小区半径一半位置(500,)时的模型中得到的四种估计值的平均定位误差和均方根误差RMSE。从仿真的结果来看,第二层融合的均方根误差和平均误差都最小,因此选择第二层融合的结果作为最后输出。

图5 MS靠近小区边界位置时的性能比较
图5显示的是MS靠近小区边界位置(800,550)时的四种估计值的平均定位误差和均方根误差RMSE。仿真结果显示,第一层融合定位均方根误差比第二层融合的稍大,但第二层融合的平均定位误差最小,综合两种因素考虑,因此仍然选择第二层融合的结果作为最后输出。
4 小结
从以上分析我们可以看出,在定位中采用数据融合技术可以结合小区信息的先验信息,根据终端的事实信道或使用环境情况,选择多种有利于当前状态的定位结果,从而取得比单一技术性能更好的数据输出。本文详细介绍了基于SADOA和TDOA的双模数据融合定位方法,通过仿真可以看出,该方法可以充分利用双模终端能测量到的定位参数,有效的提高了定位精度。
参考文献
1Tawan Panichcharoenrat ,Wilaiporn Lee.Two hybrid RSS/TOA localization techniques in cognitive radio system[J].2014 6th International Conference on Knowledge and Smart Technology (KST)2014:23-28
2R.T.Juang,D.B.Lin ,H.P.Lin. Hybrid SADOA/TDOA mobile positioning for cellular networks[J].IET Communications .2007,(2):282-287
3JuYong Do,Rabinowitz M,Enge.P. Robustness of TOA and TDOA positioning under suboptimal weighting conditions[J].IEEE Transaction.2007,43(3):1177-1180
4Mohammad Reza Gholami,Sinan Gezici,ErikG.Strom,etal.Hybrid TW-TOA/TDOA positioning algorithms for cooperative wireless networks.The direction of IEEE communications society subject matter experts for publication in the IEEE ICC 2011 proceedings.PP.1-5
5Saleh Al-Jazzar,Mounir Ghogho,and Desmond McLernon.A joint TOA/AOA constrained minimization method for locating wireless devices in Non-Line-of-Sight environment[J].IEEE transactions on vehicular technology, 2009,58(1): 468-472
6L.Cong ,W.Zhuang.Hybrid TDOA/AOA mobile user location for wideband CDMA cellular systems[J].IEEE Trans.Wireless Communications.2002: 439-447
7Ali Broumandan,Tao Lin,John Nielsen,etal.Practical results of hybrid AOA/TDOA geolocation estimation in CDMA wireless networks.Vehicular Technology Conference,2008.VTC 2008-Fall.IEEE 68th .21-24 Sept.2008:1-5
8孙国林,郭伟.基于数据融合的蜂窝无线定位算法研究[J].通信学报,2003,24(1):137-142
9D.L.Hall,J.Linas.An introduction to multisensor data fusion Proceding[J].IEEE.1997,85:856-23
10J.Caffery.A new approach to the geometry of TOA location in Proc.IEEE Vehicular Technology Conf.(VTC’00).2000.:1943-1949
11T.Kleine-Ostmann,A.Bell.A data fusion architecture for enhanced position estimation in wireless networks[J].IEEE communications letters.2001,5(8):343- 345
12L.J.Greeenstein et.al.A new path-gain /delay-spread propagation model for digital cellular channels[J].IEEE Trans.on VT.1997,46:477-484
13邓平.蜂窝网络移动台定位技术研究[D].西南交通大学博士学位论文.2002,5
DOI:10.3969/j.issn.1006-6403.2016.05.006
基金项目:四川省教育厅一般科研项目《移动WiMAX通信系统多层协作资源分配技术的研究》 (项目编号:12ZB119);四川文理学院重点项目《无线双模数据融合定位技术研究》 (项目编号:2010A04Z)于终端的移动特性,往往终端在较短的时间内会经历多个应用场景。在定位过程中,若采用单一的定位技术几乎不可能在不同信道和网络环境下都能始终达到满意的定位效果。因此,基于多个定位算法融合后的混合定位方法,比如TOA/RSS[1],TDOA/SADOA[2],TOA/TDOA[3,4],TOA/ AOA[5],TDOA/AOA[6,7],数据融合[8,9]等得到了广泛的研究。
收稿日期:(2016-03-24)
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
中成药(2022年1期)2022-01-27
中学生数理化·高一版(2019年12期)2019-12-31
飞天(2019年6期)2019-07-08
中国钢铁业(2018年6期)2018-07-26
现代测绘(2018年1期)2018-03-06
自动化学报(2017年2期)2017-04-04
测绘通报(2016年9期)2016-12-15
新高考·高二数学(2015年2期)2015-05-27
新高考·高二数学(2014年7期)2014-09-18
