
电传式前轮转弯系统建模与仿真
2016-06-13 10:01李闯
科技视界 2016年13期
李闯

【摘 要】当前飞机前轮转弯功能逐步采用电传操纵技术,为了深入的研究电传操纵技术,本文以典型的电传式前轮转弯系统为研究对象,根据电传式前轮转弯功能模块建立了转弯系统仿真模草要求。
【关键词】电传;转弯系统;仿真
0 引言
民机安全是民机事业的生命线[1],起落架设计是飞机设计中最基础的领域之一,设计和集成的过程中涉及各种各样的工程领域,并且在最近的几十年中变得越来越复杂[2]。大量的统计表明有50%以上的安全事故发生在飞机的起飞和着陆阶段。飞机前轮操纵系统是实现飞机滑行机动和起降控制的关键部件,在改善刹车使用寿命,抗侧风起降、轮胎偶然爆破事故中纠正飞机航向以及减少飞机起降事故方面发挥着非常重要的作用[3-4]。
目前国外在大型民用飞机上普遍使用电传式前轮转弯系统,相比而言,目前国内对这方面应用并不成熟,本文对电传式前轮转弯系统进行了建模仿真,为进一步研究电传式前轮转弯系统提供技术支持。
1 原理
电传式前轮转弯系统的工作原理是控制器输出命令控制伺服阀,伺服阀驱动前轮转弯作动器,从而实现前轮转弯功能。在转弯过程中控制器对比输入命令与实际前轮转弯角度,实现闭环控制。
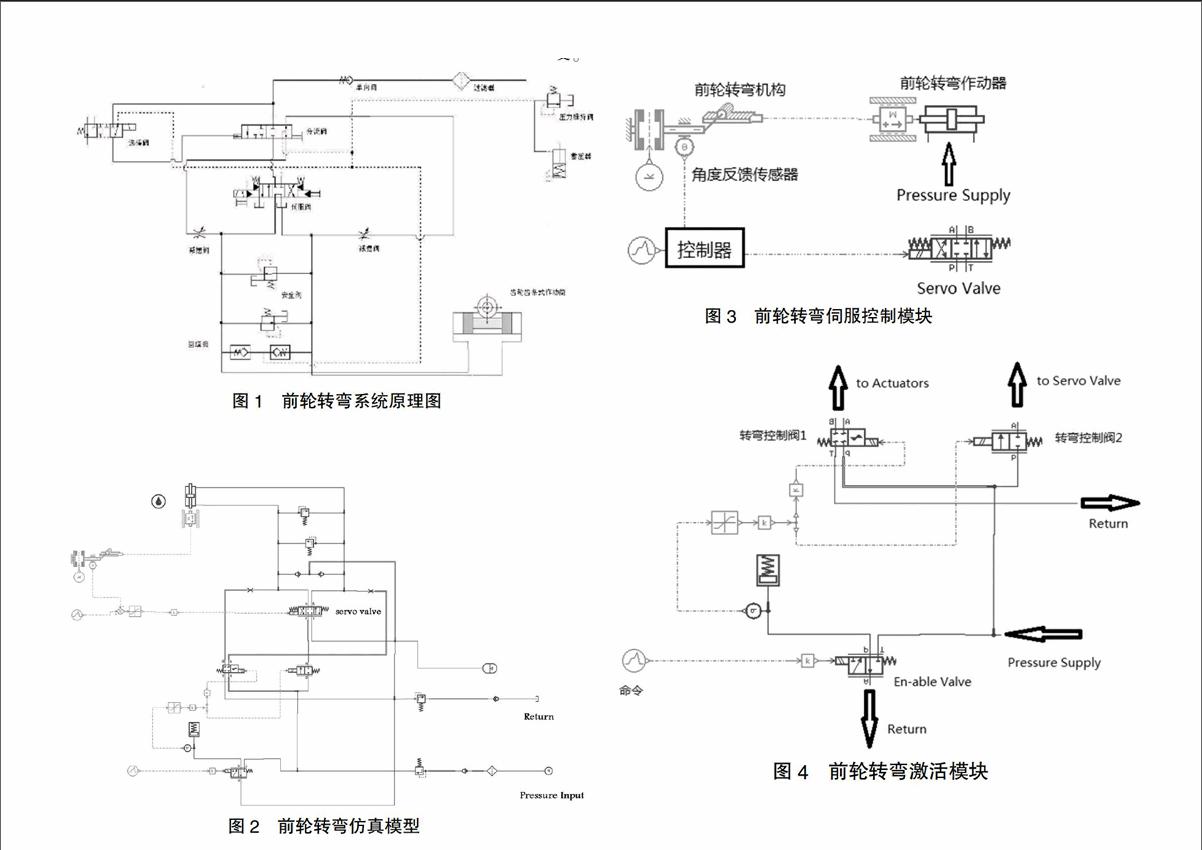
图1 前轮转弯系统原理图
如图1所示,前轮转弯控制系统主要包含选择阀、液压伺服阀、减摆阀、前轮转弯作动机构等。
2 建立仿真模型
基于前轮转弯系统原理,在LMS Imagine.lab AMESim软件平台中建立了控制系统仿真模型。
图2 前轮转弯仿真模型
如图2所示,前轮转弯系统主要包含伺服控制模块、前轮转弯激活模块以及减摆模块。
2.1 前轮转弯伺服控制模块
前轮转弯伺服控制模块主要作用是根据转弯指控制前轮转弯角度。
图3 前轮转弯伺服控制模块
如图3所示,前轮转弯伺服控制模块由伺服控制器、转弯角度反馈传感器、伺服控制阀组成。当伺服控制系统接收到前轮转弯角度命令时,控制器比较当前前轮转弯角度与命令角度,从而控制伺服阀驱动前轮转弯机构运动。
2.2 前轮转弯激活模块
前轮转弯机构在正常工作情况下提供转弯功能。当飞机被牵引时,牵引车驱动前轮转弯机构,因此前轮转弯还需要能够使得转弯机构处于自由转向状态。前轮转弯激活模块用于控制前轮转弯处于激活状态或者自由转向状态。
图4 前轮转弯激活模块
如图4所示,前轮转弯激活模块未收到激活控制命令时,En-able阀不被激活,转弯控制阀1将作动器两端连通,使得作动器内液压油处于内循环状态。当前轮转弯激活模块被激活时,En-able阀被激活,从而使得液压压力通过转弯控制阀2传输到伺服控制阀,控制器根据要求控制伺服阀开度,从而实现前轮转弯功能。
2.3 减摆模块
当飞机在地面滑跑阶段,由于外界干扰会导致前轮转弯处于摆振状态,为了降低摆振对起落架机构的伤害,前轮转弯处于自由转向状态时需要有减摆功能。
图5 减摆模块
如图5所示,飞机前轮转弯减摆功能是利用小孔节流原理实现起落架减摆。减摆时,作动器两端液压源处于连通状态,当外界扰动驱动前轮转弯作动器时,作动器两端液压油相互流动,当液压油经过节流孔时产生一定的阻尼,从而实现前轮减摆功能。
3 仿真结果
3.1 前轮转弯仿真结果
图6 前轮转弯仿真结果
如图6所示,为测试前轮转弯的跟随性,在0到15s内连续改变前轮转弯角度命令,仿真过程中前轮转弯角度始终随者前轮转弯角度变化而变化。
3.2 减摆模式仿真结果
图7 转弯机构受到的力
如图7所示,在1s时,在前轮转弯机构上施加10000N的力,用于模拟前轮转弯机构在地面滑跑时受到的地面扰动,在1.2s时地面扰动力减小为0。
图8 作动器腔内压力
如图8可知,当前轮转弯机构受到地面扰动时,作动器腔内压力很快增大到设定压力,阻碍作动器的运动,从而起到减摆作用。
4 结论
本文建立了电传式前轮转弯系统,并对主要功能进行了测试。
(1)该仿真模型能够实现预期的前轮转弯功能,并具有良好的动态性能。
(2)该模型实现了前轮减摆功能,当转弯机构受到地面扰动时能够起到减摆作用。
【参考文献】
[1]王敏芹,郭博智.民用飞机事故/事故征候统计与分析手册[M].航空工业出版社.
[2]聂宏,魏小辉.大型民用飞机起落架关键技术[J].南京航空航天大学学报.
[3]毕振翰,许峰.民机起落架转弯性能分析研究[J]科技创新与应用.
[4]王占林.近代电器液压伺服控制[M].北京航空航天出版社,2005.
[责任编辑:汤静]
猜你喜欢
装备环境工程(2022年9期)2022-10-13
科学与财富(2020年30期)2020-12-14
大众科学·中旬(2020年6期)2020-06-29
山东工会论坛(2020年3期)2020-06-10
科技风(2020年5期)2020-02-22
航空兵器(2020年6期)2020-01-25
科技资讯(2016年18期)2016-11-15
