适老化智能坐便器机械结构设计研究
2016-06-13 07:23:48余志鹏余志祥
顺德职业技术学院学报 2016年2期
余志鹏,余志祥,吴 卓
(1.顺德职业技术学院电子与信息工程学院,广东佛山528333;2. Monash University,College of art design and architecture,Australia;3.顺德职业技术学院科技处,广东佛山528333)
适老化智能坐便器机械结构设计研究
余志鹏1,余志祥2,吴卓3
(1.顺德职业技术学院电子与信息工程学院,广东佛山528333;2. Monash University,College of art design and architecture,Australia;3.顺德职业技术学院科技处,广东佛山528333)
摘要:实现适老化智能坐便器座板垂直升降以及一定角度倾斜的功能,设计通过步进电机、梯形丝杆、推杆电机,复合滚轮轴承等机械零部件所构成的机械结构,实现将座板平稳快速提升到指定高度,且能在一定角度范围内倾斜座板平面。
关键词:坐便器;升降;倾斜
根据民政部统计公报显示,截至2013年年底,内地60岁及以上老年人口超过两亿,占总人口的14.9%。2014年,65岁及以上人口达1.38亿,占总人口的10.1%。而到2050年前后,内地每3个人中就有一位超过60岁的老人。专业人士还结合全国人口普查数据作出估算,目前,我国处于失能、半失能、失智状态,或超过80岁以上、确需照料的老人约有5000万人[1]。
随着中国老年化现象的日益增长,解决老年人生活中的困难成为了一个值得重视的问题,开发相应的辅助产品也就成为了当今产品设计研发主题之一。“具有物联功能适老化智能坐便器”是一款专门针对行动不便,如厕有困难的老年人群所设计的卫浴产品。该产品结合了智能检测、机械结构、物联网三大技术板块,通过技术手段解决老年人因独自如厕时发生危险情况的问题。
1 方案构思
为满足“具有物联功能适老化智能坐便器”辅助使用者完成如厕动作的功能,本研究需要找到实现承载使用者进行升降和使座板在一定角度范围内倾斜这两大功能的机械结构。因此从座板升降和座板倾斜这两个方面进行构思。
1)座板升降。
坐便器的使用者存在身高、体重的区别,因此升降结构的升降行程,承载能力的对应值应当要在一定范围内可调。市面上现有的升降式坐便器款式较少,且现有产品的可调行程都较短,座板抬升的离地高度不高,很难满足使用者站立使用的需求。
考虑到需要实现垂直方向的大行程升降且位置可调,参考线性模组的设计思路设计垂直升降座板的机械结构。线性模组是一种直线传动装置,具有高刚度、高精度、高速度、可控制、可靠性强等诸多特点。其主要由丝杠螺母传动机构、直线导轨以及伺服电机组成。丝杠螺母机构又称螺旋传动机构。它主要用来将旋转运动变换为直线运动或将直线运动变换为旋转运动。线性模组中一般选用滚珠丝杠和直线滑轨,但本产品对精度要求不高,也需要丝杠具有一定的自锁力起保护作用,防止装置失效导致座板的下跌造成事故发生,同时考虑这是一款卫浴产品其成本不应太高,因此考虑用梯形丝杠代替滚珠丝杠,用复合滚轮轴承组合件代替直线导轨。复合滚轮轴承是由轴向和径向两个滚轮轴承组装而成的,减小轴承体积,简化安装结构,从而降低了制造成本。复合滚轮轴承径向和轴向的承载能力都比较大,各配件可替换性强。所以,在控制系统的设计过程中要综合考虑控制要求、成本等多方面的因素,选用适当的控制电机[2]。步进电机能满足设计需要且成本较低,因此选择使用步进电机作为升降机构的执行电机。
2)座板倾斜。
坐便器座板抬升到使用者下阴高度后,将座板倾斜约0至10度的角度范围将更有利于使用者感受到座板平面,且一般人实现坐下这一动作时都会先弯曲膝盖使臀部与水平面产生一定角度后再坐下,因此座板的倾斜将会大大优化使用者的使用体验,对于腰腿力量不足的长者更是能让他们能减轻弯曲膝盖的负担,轻松坐到座板平面上。
座板是用步进电机带动丝杠螺母机构进行抬升,为了确保步进电机的输出力矩尽可能多的承载使用者的体重,确保不会因为过重出现的超载故障,应尽可能地减轻座板倾斜机构的重量,以电动病床为参考,使用推杆电机将座板抬起一定角度。推杆电机驱动简图如图1所示。
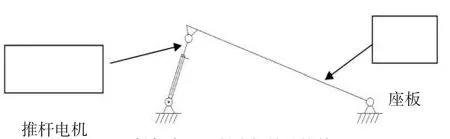
图1 推杆电机倾斜座板的结构简图
2 主要零部件的选型及设计
对实现升降座板和倾斜座板机械结构的主要零部件进行选型和设计。升降机构包括丝杠螺母传动机构的校核、步进电机的选型、丝杠两端轴承座的选择、复合滚轮轴承的选择。倾斜机构主要是推杆电机的选择。
1)丝杠螺母传动机构的校核。
丝杠螺母传动机构的校核步骤参照文献[3]中螺旋传动、摩擦轮传动中的设计例2进行。
设计承载的使用者体重不超过150 kg,将座板倾斜机构重量及安全余量综合考虑,将总负载设为300 kg。本设计者身高约1 700 mm,下阴高度约为750 mm,为了使本产品满足于大部分使用者的需求,设满足最高身高为1 900 mm,即下阴高度约为950 mm,而坐便器本体高度为400 mm,因此最大有效行程应大于550 mm,设最大有效行程为600 mm。设运行最大行程时,座板下降时间不超过10 s,因此承载使用者后下降平均速度为不低于60 mm/s。材料采购以及加工的难易程度,梯形丝杠螺母机构用45#钢加工而成通过涂抹进口黄油进行油封达到防氧化及润滑的效果。
45#钢调制处理:σs= 360 MPa;
σp=σs/(3~5)= 72~120 MPa,取σp= 75 MPa;
σbp=(1~1.2)σp,取σbp=σp= 75 MPa;
τp= 0.6σp= 45 MPa;
查机械设计手册[3]表12-1-9,钢对钢低速Pp= 7.5~13 MPa,本设计为快速因而Pp取1 MPa
①按耐磨性计算螺纹中径。
查机械设计手册表[3]12-1-4,整体式螺母取ψ= 2.5,

由GB/T 5796.3—1986可选d= 32 mm、P= 6 mm、d2= 29 mm、D4= 33 mm、d3= 25 mm、D1= 26 mm,螺旋副标记为Tr32X6—7H/7e。
螺纹圈数:n = H/P = 73/6 = 12.2圈;螺母高度:H=ψd2= 2.5×29 = 72.5 mm,取H=73 mm
②自锁性验算。
单头螺纹:S = P = 6 mm,故螺纹升角为

查机械设计手册表[3]12-1-7,钢对钢f = 0.15~0.17,取f = 0.16

λ<P',故自锁可靠。
③因螺母与螺杆材质相同,由机械设计手册表12-1-4可知只需校核螺杆螺纹强度。
由机械设计手册表[3]12-1-3可得,螺纹摩擦力矩

带入机械设计手册表12-1-4中式(4)

螺杆及螺母的螺纹满足强度校核。
2)步进电机选型。
由于这款坐便器的动力来源是电力,使用过程停电也是时有发生的事,因此除了丝杠的自锁能力,希望步进电机在断电情况下也有一定的保持力矩,因此选用带刹车步进电机。
负载转矩计算如下:
设定载荷为300 kg,所以有F= mg =300×9.8 N= 2 940 N;
升降平均速度为v = 60 mm/s = 3 600 mm/min,所以有n=v/P = 600 r/min;
参考文献[4]中负载转矩据算公式:T=(PF/ 2πη)+T1,T1为丝杠螺母的摩擦转矩,在本设计因为已经将其考虑在加大载荷值内。设传动效率η= 0.5,所以有:

步进电机T-n曲线应满足n = 600 r/min时,T= 5.6 N·m。
3)丝杆两端轴承座设计。
由于本设计的梯形丝杆不是标准化产品,两端轴承座参考滚珠丝杠轴承座。根据丝杠公称直径为32 mm,分别选用FK25和FF25作为固定侧(靠近电机侧)轴承座和支撑侧轴承座。
以已选轴承座为基础,设计梯形丝杠两端轴肩尺寸如图2所示。

图2 丝杠轴肩设计
4)复合滚轮轴承选择。
线性模组常用直线导轨作为导向和承载零件。本产品要承载一个成年人的重量进行升降,对直线导轨的力矩要求过高,一般直线导轨无法满足,要使用滚柱式直线导轨才可实现,但滚柱式直线导轨成本是滚柱式直线导轨的三倍以上,成本过高。与本设计结构类似的产品有升降式叉车,其门架升降系统中所用的复合滚轮轴承可复合本设计需求。复合滚轮轴承是由轴向和径向两个滚轮轴承组装而成的,减小轴承体积,简化安装结构,从而降低了制造成本。复合滚轮轴承径向和轴向的承载能力都比较大,各配件可替换性强,越来越多的应用在各种门架升降系统中。
扭矩参数计算:T = FL = mg·L = 300×9.8×0.5= 1.47 kN·m。可知型号为4.053的复合滚轮轴承即可满足设计需求。
5)推杆电机的选择。
将座板倾斜10°时推杆电机实现最大行程,由于座板尺寸不变,因此可将座板起始位置和最终位置以及推杆最终伸长量简化为一个最小角为10°的等腰三角形,最短边的长度可近似为推杆电机行程。座板长度约为450 mm,座板安装的支架会比座板长度稍长,推杆电机与支架直接连接,因此应以支架长度为准,设支架长度约为500 mm。
拖杆电机行程:S = 2×(500×sin5°)= 87.15 mm
因为参数只是估算,且依靠了活动余量,选择行程为100 mm。选择睿拓传动系统有限公司的VT600推杆电机,其推力范围为750~6 000 N,满足设计需求。
3 结论
1)坐便器机械部分构思的总装效果。
根据上面数据计算和选取的主要零部件参数,构思出如图3所示的坐便器机械部分的总装图。
如图所示,机械部分分为升降和倾斜两部分。升降部分的机架通过挂墙的形式安装在墙体或其他形式的安装立面上,由于与坐便器本体是分离的,因此可根据坐便器实际安装位置定位升降部分的安装,容易调节。倾斜部分与升降部分连接,图中所示由推杆电机来进行角度的调节。
图4是俯视的总装图。由图中可见机架,滚轮的滑槽等大部分结构件采用了钣金拼装的形式,大大减轻了整机的重量也降低了加工成本。滑轮滑槽是通过钣金拼装的形式,可根据滚轮轴承实际安装时的误差进行一定程度调节后焊接牢固,因此可靠性更高。

图3 机械部分总装图

图4 俯视总装图
2)本设计特点。
本设计构思参考了大量现有机械结构的设计思路,以安全可靠、低成本、稳定性强为前提将这些结构进行融合或改进,广泛利用比较普及的标准化零配件,提高了设计的可行性。
梯形丝杠螺母副与复合滚轮轴承结合的升降机构,在步进电机的控制下成为了一套低成本、可控性强、负载能力强的直线运动系统,在其他机械领域也能广泛应用。以推杆电机为基础设计的倾斜机构,将本设计与医疗设备生产靠近,使日后批量生产成为可能。
参考文献:
[1]李新玲.养老产业或需5年启蒙期[N].中国青年报,2015-04-23(6).
[2]王勇.步进电机和伺服电机的比较[J].西部煤化工,2010(2):47-49.
[3]成大先.机械设计手册:第5版:第3卷[M].北京:化学工业出版社,2008.
[4]杨振辉.大型重载机床驱动系统交流伺服电机的选择[J].机械工程师,2010(8):150-151.
科技与应用
[责任编辑:吴卓]
On the Design of the Mechanical Structure of Intelligent Pedestal Pan for the Elderly
YU Zhipeng1,YU Zhixiang2,WU Zhuo3
(1. School of Electronics and Information Engineering,Shunde Polytechnic,Foshan Guangdong 528333,China;2. College of Art Design and Architecture,Monash University,Australia;3. Department of Science and Technology,Shunde Polytechnic,Foshan Guangdong 528333,China)
Abstract:In order to meet the needs of the elderly and realize the function of vertical lift of the seat plate of intelligent pedestal pan and the seat plate could form a certain angle as necessary,the mechanical structure is formed by the stepper motor,trapezoidal screw rod,motor,composite roller bearing and other mechanical parts. Such design could achieve steady and rapid lift to the designated seat height,and the seat plate could form a certain slope as desired.
Key words:pedestal pan;vertical lift;slope
中图分类号:TP273
文献标志码:B
文章编号:1672-6138(2016)02-0013-04
DOI:10.3969/j.issn.1672-6138.2016.02.004
收稿日期:2016-04-04
基金项目:佛山市机电专业群工程技术开发中心2015年第二批开放课题(2015-KJZX134)。
作者简介:余志鹏(1981—),男,广东顺德人,副教授,研究方向:控制理论与控制工程。