
一种基于多传感器的步态相位实时检测系统*
2016-06-13 09:09周小华李伟达李春光胡海燕张虹淼
传感器与微系统 2016年2期
关键词:传感器
周小华, 李 娟, 李伟达, 李春光, 胡海燕, 张虹淼
(苏州大学 机电工程学院 江苏省机器人技术与系统重点实验室,江苏 苏州 215021)
一种基于多传感器的步态相位实时检测系统*
周小华, 李娟, 李伟达, 李春光, 胡海燕, 张虹淼
(苏州大学 机电工程学院 江苏省机器人技术与系统重点实验室,江苏 苏州 215021)
摘要:对人体步态相位进行准确实时的判断是智能假肢等康复机器人控制的基础,提出并建立了一种实时状态相位检测系统。该系统包含了4只压力传感器和2只姿态传感器,能够准确地区分出平地行走时足跟着地、足放平、足跟离地、足尖离地、摆动弯曲以及摆动伸展等五种状态相位,实验表明:该系统能够适应不同测试者的不同步幅和步速,并能够应用在假肢的实时控制中。
关键词:智能假肢; 步态相位; 状态判断; 传感器
0引言
人工假肢、助行机器人以及康复训练机器人等是中风、偏瘫、截肢患者等恢复行走能力和生活能力的主要手段。机器人的控制方法是保证其穿戴者行走更自然和安全的重要因素。由于人体运动时具有典型的步态特征,基于状态的控制方法受到广泛的关注,有限状态机[1]、映射控制方法[2]、模糊自适应控制方法[3]等相继出现。步态相位判断是基于状态的机器人控制方法的基础[4]。
现有的步态相位判断系统大多采用各种传感器及其组合来实现,较为典型的有力传感器[5]、角速度传感器[6]、加速度传感器[7]。多种传感器及其不同组合方式逐渐成为步态相位判断方法的发展趋势。
本文基于力传感器和姿态传感器给出一种状态相位检测系统,该系统原理简单、减少了计算成本,具有较好的实时性,能够适应不同的穿戴者、不同的行走速度和步幅,并能成功应用于在假肢的控制中。
1人体下肢运动规律分析与步态相位划分方法
人体行走过程是一个典型的节律性运动,根据图1(a)所示的一个步态周期内的踝关节力矩与角度关系以及图1(b)所示的膝关节角度曲线,本文将人体行走的一个周期划分为5个相位,即 CP(controlled plantar-flexion)相、 CD(controlled dorsi-flexion)相、 PP(powered plantar-flexion)相、 SF(swing flexion)相以及SE(swing extend)相。各相位特点如下:CP相,该相位下,踝关节力矩较小且基本不变,对应于足的位置即足跟着地状态至足放平状态;CD相,踝关节角度力矩与角度都逐渐增大,直至达到最大背屈角度,对应于足的位置为足放平状态至足跟离地状态;PP相,踝关节力矩与角度又同时减小,直至踝关节力矩减小到0,此时站立相结束,进入足离地阶段,即摆动相,足的位置从足跟离地状态到足尖离地状态;SF相,从足位置处于足尖离地开始,终止于膝关节弯曲到最大位置,该相位膝关节角速度大于0;SE相,紧接于SF相,终止于下一周期的足跟着地状态,该相位下膝关节伸展,角速度小于0。
2状态相位判断系统与实验
本文采用足底力传感器与姿态传感器相结合的方式对步态相位进行判断。
足底压力传感器模块由4只FSR 402型压力传感器(Interlink Electronics公司)、一块Arduino Uno R3开发板及其电路组成。2只力传感器分别安装在足跟、足尖处,由于人在行走过程中的非对称性,为了增加判断的准确性,在第一跖骨和第四跖骨处增加2只传感器,用来判断CP相、CD相以及PP相(图2)。开发板以100 Hz频率采集4路足底压力电压信号,用阈值表征各个传感器的通断情况(当压力传感器有信号时,输出为1;反之,输出为0),开发板实时地将整合后的相位信息通过串口发送至计算机。
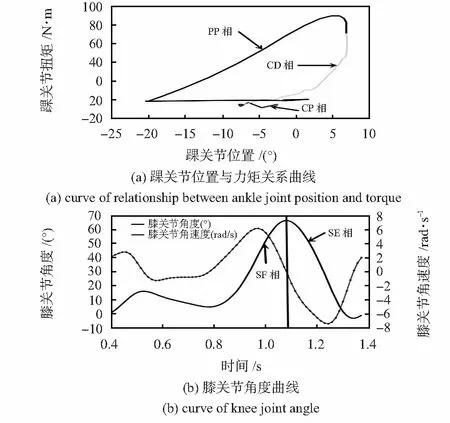
图1 步态曲线Fig 1 Gait curve
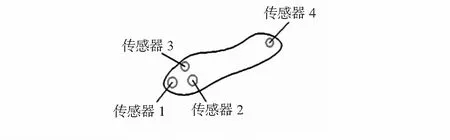
图2 足底力传感器安装示意图Fig 2 Placement diagram of plantar force sensors
姿态传感器模块则是由2只Xsens Technologies公司的高精度Xsens姿态传感器和运动捕捉模块组成,通过摆动相下膝关节角速度的正负关系准确地区分出SF相和SE相。2只姿态传感器按图3方式分别安装在大腿和小腿上,运动捕捉模块同样以100 Hz的采样速度采集姿态信息,从串口将角度信息实时发送至计算机处理。

图3 姿态传感器安装示意图Fig 3 Placement diagram of attitude sensors
步态相位判断系统(图4)基于MFC编程框架编写人机交互界面,完成整个系统的数据实时采集任务。
状态相位判断实验的目的是验证该系统能否适应不同测试者、不同步速以及不同步幅,完整实时地输出相位判断结果(为方便起见,实验结果中1,2,3,4,5分别代表CP相、CD相、PP相、SF相和SE相), 图5为步态相位判断程序的流程。

图4 步态相位判断系统Fig 4 Gait phase judgement system
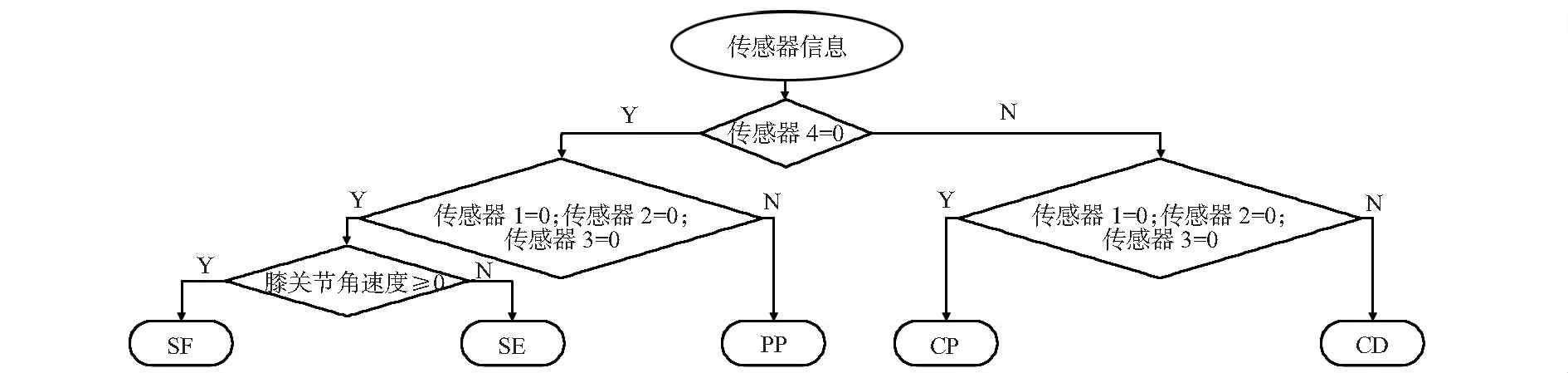
图5 步态相位判断流程图Fig 5 Flow chart of gait phase judgement
3名实验者完成以下几个任务:
1)实验者A以正常步速水平行走,改变步幅大小,以较大步幅、正常步幅、较小步幅分别行走。
2)实验者A以正常步幅水平行走,改变步速大小,以快速、正常速度、慢速分别行走。
3)实验者A,B,C以正常步速、正常步幅分别行走。
实验中的步速(步态周期)变化范围为1.2~1.8 s,步幅变化范围为65~85 cm。
选取一组数据进行分析,从各个传感器信号和步态相位判断结果(图6)以及一个步态周期的百分比与相位的关系(图7)可以看出:站立相(CP相,CD相,PP相)大概占据了一个步态周期的60 %(足尖离地时的约为63 %),摆动相(SE相,SF相)则为一个步态周期的40 %左右,这与理论结果一致。从实验者以不同步速、步幅行走的数据结果可以得出:步幅、步速变化不会影响站立相和摆动相所占的百分比。实验结果表明了本文提出的步态相位判断方法能够适应不同的步速范围和不同的步幅范围,并在不同的实验者身上都得到验证。

图6 步态周期为1.8 s的步态判断结果Fig 6 Gait phase judgement result while gait cycle is 1.8 s
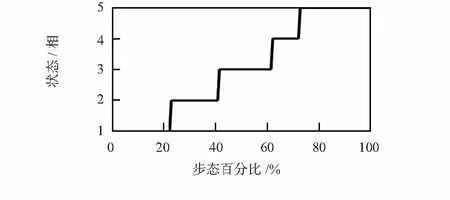
图7 步态周期为1.8 s的步态百分比图Fig 7 Gait percent while gait cycle is 1.8 s
3假肢控制实验
假肢膝关节控制系统硬件平台包括了假肢膝关节模型,固高GT运动控制器、驱动器、光栅、驱动电源、桌面PC以及相应的电气系统。
本文基于固高运动控制器提供的C语言函数库和Windows动态链接库,利用MFC框架式编程方式编写了特定的控制系统软件。
本实验旨在验证测试者穿戴下肢状态相位判断系统以不同的步速行走,能使得假肢跟随健肢侧行走的步速范围,假肢实验控制系统框图和控制流程分别如图8和图9所示。考虑到实验的安全性和稳定性,在整个实验过程中,假肢样机模型均固定于支架上。实验过程中测试者步速(步态周期)变化范围为1.2~2.0 s。

图8 假肢控制系统实验框图Fig 8 Experimental block diagram of prosthesis control system

图9 膝关节假肢控制流程图Fig 9 Flow chart of knee joint prosthesis control
图10是步态周期为1.6,1.8 s的假肢规划运动曲线和实际运动曲线图。从图中可以看出:在健肢侧以一定的步速范围水平行走,假肢可以较好地按照规划曲线运动,但同时存在着抖动和迟滞现象,这将在后续的研究工作中改进,实验表明:当步态周期在1.2~2.0 s之间,假肢能够较好地跟随健肢侧运动。

图10 步态周期为1.6 s和1.8 s的假肢运动曲线Fig 10 Motion curve of prosthesis while gait cycle are 1.6 s and 1.8 s
4结论
本文提出了一种实时步态相位判断方法并阐述了其实现形式,通过足底力传感器和姿态角度传感器,以实时的形式将步态相位信息提取出来,减少了传感器的使用数量,去除了繁琐的数据整合计算,通过实验验证了不同步速、不同步幅下步态相位的完整判断,并验证了该方法可应用于假肢的控制中。
参考文献:
[1]Bar A,Ishai G,Meretsky P,et al.Adaptive microcomputer control of an artificial knee in level walking[J].Journal of Biomedical Engineering,1983,5(2):145-150.
[2]Borjian R,Khamesee M B,Melek W.Feasibility study on echo control of a prosthetic knee:Sensors and wireless communica-tion[J].Microsystem Technologies,2010,16(1/2):257-265.
[3]Joshi D,Mishra A,Anand S.ANFIS-based knee angle prediction:An approach to design speed adaptive contra lateral controlled AK prosthesis[J].Applied Soft Computing,2011,11(8):4757-4765.
[4]喻洪流,关慎远,钱省三,等.膝上假肢的智能控制方法[J].中国康复医学杂志,2008,23(2):145-147.
[5]王人成,董华,黄昌华,等.低成本人体步态在线检测系统[J].清华大学学报:自然科学版,2002,42(2):165-167.
[6]Catalfamo P,Ghoussayni S,Ewins D.Gait event detection on level ground and incline walking using a rate gyroscope[J].Sensors,2010,10:5683-5702.
[7]李爽,罗志增,孟明.基于加速度传感器的下肢运动信息获取方法[J].机电工程,2009,26(1):5-7.
A real-time gait phase detection system based on multi-sensors*
ZHOU Xiao-hua, LI Juan, LI Wei-da, LI Chun-guang, HU Hai-yan, ZHANG Hong-miao
(School of Mechanical and Electric Engineering, Soochow University,Key Laboratory of Robotics and System of Jiangsu Province,Suzhou 215021,China)
Abstract:Accurate and real-time gait phase detection is basis of control of intelligent prosthesis and other rehabilitation robot,a real-time phase detection system is proposed.Four foot force sensors and two attitude sensors are used in the system,which can detect phases of heel strike,foot flat,heel off,toe off,swing flexion and swing extend during walking on level ground.The experimental results show that the system can adapt to different walking velocities,different stride length of different subjects,and the experiment of prosthesis control is performed to prove the gait phase detection system can be used to real control of prosthesis.
Key words:intelligent prosthesis; gait phase; state judgement; sensor
DOI:10.13873/J.1000—9787(2016)02—0091—03
收稿日期:2015—04—28
*基金项目:国家自然科学基金资助项目(51475314)
中图分类号:TP 242
文献标识码:B
文章编号:1000—9787(2016)02—0091—03
作者简介:
周小华(1990-),男,江苏南通人,硕士研究生,主要研究方向为康复机器人。
李娟,通讯作者,E—mail:lijuan@suda.edu.cn。
猜你喜欢
小学科学(2022年8期)2022-09-07
商品与质量(2021年43期)2022-01-18
纺织科学研究(2021年1期)2021-12-03
食品安全导刊(2021年20期)2021-08-30
纺织科学研究(2021年7期)2021-08-14
舰船科学技术(2021年12期)2021-03-29
汽车维修与保养(2021年8期)2021-02-16
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
电子制作(2019年7期)2019-04-25
