
基于捷联稳定的低成本动中通天线设计
2016-06-12 02:42:04黄元庆
河北省科学院学报 2016年4期
黄元庆
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
基于捷联稳定的低成本动中通天线设计
黄元庆
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
针对MEMS惯导器件精度差、无法完成寻北以及漂移速度快的缺点,引进GPS/北斗速度信息,通过卡尔曼滤波算法进行误差估计,实现了惯导姿态的稳定输出。在捷联稳定的基础上,叠加主面圆锥扫描,利用同步卫星信标进一步进行误差修正。通过实验验证,该方法能够在大动态情况下完成天线的稳定跟踪。
MEMS;GPS/北斗;卡尔曼滤波;捷联稳定;主面圆锥扫描
随着卫星通信技术的发展以及移动通信的应用,移动载体卫星通信系统的需求量逐年增加[1]。动中通天线作为通信系统的前端,完成信号的发射和接收。因此,如何保证天线在载体移动过程中始终指向卫星,成为动中通天线的研究重点。传统的动中通天线普遍使用单脉冲、副面圆锥扫描等平台稳定方式,其优点是跟踪精度高、对惯导依赖性低,但是由于复杂的网络结构以及副面圆扫机构,使得天线的复杂度大幅提高,必然造成可靠性的降低。捷联稳定方式是另一种常用的动中通天线跟踪方式,其优点是结构简单,可靠性高,但是对惯导的精度要求很高,常用的激光惯导或光纤惯导的价格就有几十甚至上百万,造成整个动中通天线价格异常昂贵。为了降低成本,本文采用低精度的MEMS惯导,引入GPS/北斗信息进行姿态修正,结合动中通天线系统中自身特有的信息与惯导进行信息融合,实现动中通天线的稳定跟踪。
1 基于GPS/北斗的MEMS组合惯导
由于MEMS陀螺、加速度计的精度以及零偏问题,单纯的MEMS惯导存在不可避免的误差及漂移问题。为解决该问题,引入GPS/北斗的东向、北向、天向速度作为观测量,通过卡尔曼滤波器对陀螺、加速度计等惯性器件进行误差补偿,结合捷联惯性导航解算算法得到高带宽的角速度、加速度、位置、速度、航向、姿态信息。
图1为基于GPS/北斗的MEMS组合惯导原理图。
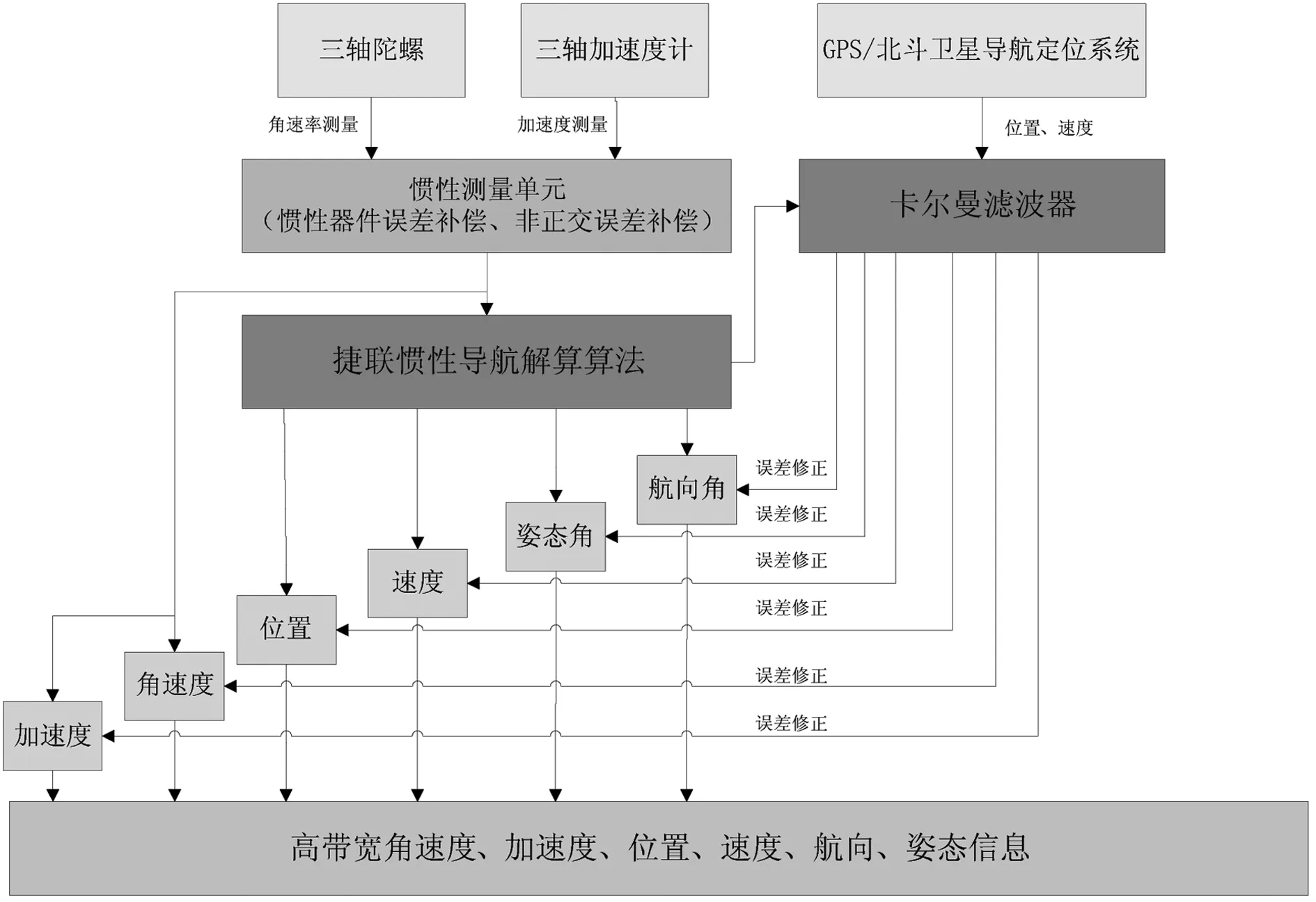
图1 基于GPS/北斗的MEMS组合惯导原理图
2 捷联稳定的指向跟踪
对于安装在动载体上的方位-俯仰式座架天线系统来说,载体坐标系与天线坐标系是一致的,首先约定载体姿态信息的定义如下:
航向角H:动载体行进方向与正北的夹角,以正北为基准,顺时针为正;
横摇角R:以水平为基准,行进方向作参照,载体右倾为正;
纵摇角P:以水平为基准,载体正前方向上为正;
地理方位角A:在地理坐标系中,天线指向卫星时的方位角度;
地理俯仰角E:在地理坐标系中,天线指向卫星时的俯仰角度;
通过地理系与载体系的坐标变换,利用载体姿态信息H、R、P得到动载体坐标系中的指向角[2]Aj和Ej:
(1)
(2)
sinEj=sinRcosEsin(A-H)-cosRsinPcosEcos(A-H)+cosRcosPsinE
(3)
Ej=arcsin[sinRcosEsin(A-H)- cosRsinPcosEcos(A-H)+ cosRcosPsinE]
(4)
在天线跟踪过程中,通过伺服机构实时控制天线的Aj和Ej就能使天线实时对准卫星。
3 基于主面圆锥扫描的修正技术
在天线跟踪过程中,由于惯导的精度问题、惯导随时间漂移导致的误差、安装误差、标校误差以及卫星漂移带来的误差,通过单纯的坐标变换基本无法实现天线精确对准目标。为此本文引入主面扫描的方式修正上述各方面原因带来的指向误差。
主面扫描通过驱动天线方位、俯仰在空间上偏开波束中心后,利用扫描过程中不同位置的信标功率差计算出扫描中心与波束中心的距离,以此修正指向跟踪过程中不可避免的指向偏差。
在具体实现过程中,在天线指向卫星并且信标锁定的情况下,在方位地理角上叠加正弦变量 Asin(ωt),在俯仰地理角上叠加余弦变量 Acos(ωt)(扫描幅度A由跟踪精度确定,ω一般选择1Hz)。为保证扫描结果尽量接近规则的圆形,在扫描过程中对方位、俯仰上叠加的正余弦变量进行微分,将微分结果作为前馈速度输入到环路控制中去。扫描过程如图2所示。
在扫描过程中,记录每个位置点的信标功率电平,每一个周期扫描完成后,计算扫描路径(方位正弦、俯仰余弦,由于环路滞后问题,可能需要调整相位值,将正余弦信号进行平移)上半部分与下半部分的功率差,作为方位、俯仰差电压。
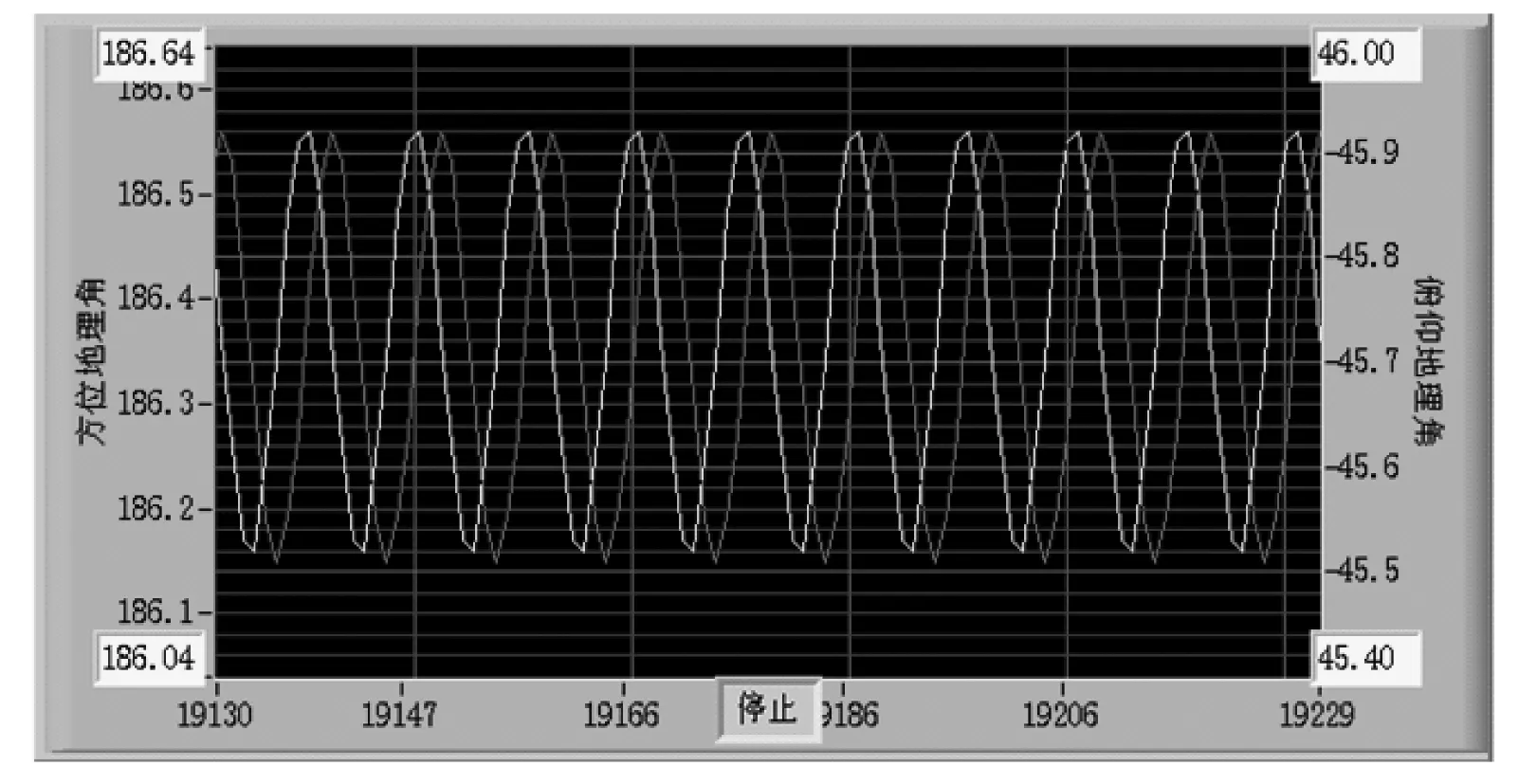
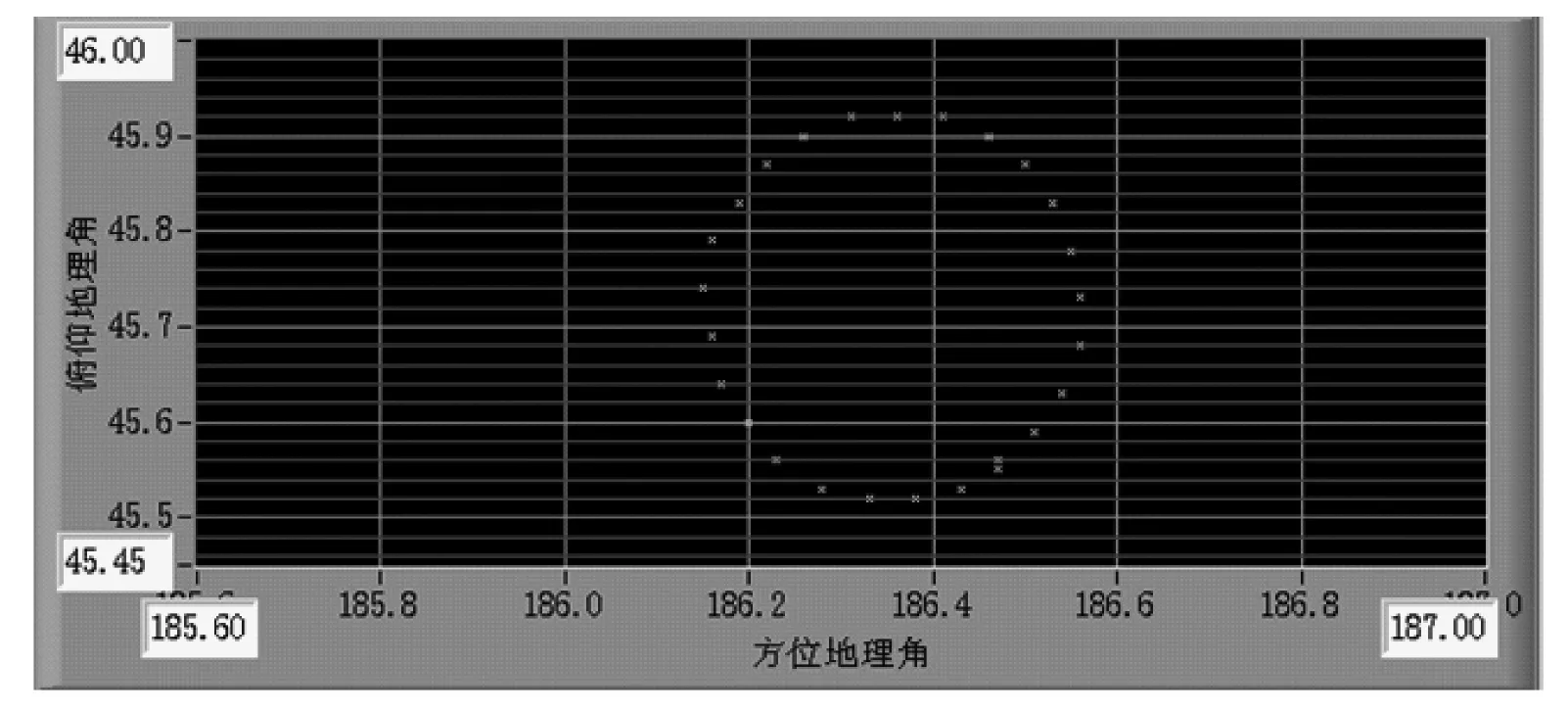
图2 主面圆锥扫描过程图
利用方位、俯仰差电压对指向进行修正,指向修正时分为两档,粗调档和精调档,当差电压较大时按粗调档进行修正,此时修正幅度大,利于快速搜索指向中心。当差电压较小时进行精修正,此时修正幅度很小,原因在于当前主面扫描过程中还有扫错状况,但大概率事件是扫正确,因为每秒的调整步距十分小,走错步也不会影响跟踪。
图3是主面圆锥扫描的修正效果图,从天线接收到的卫星信标功率可以看出在很短的时间内通过差电压修正,可以引导天线精确对准卫星。
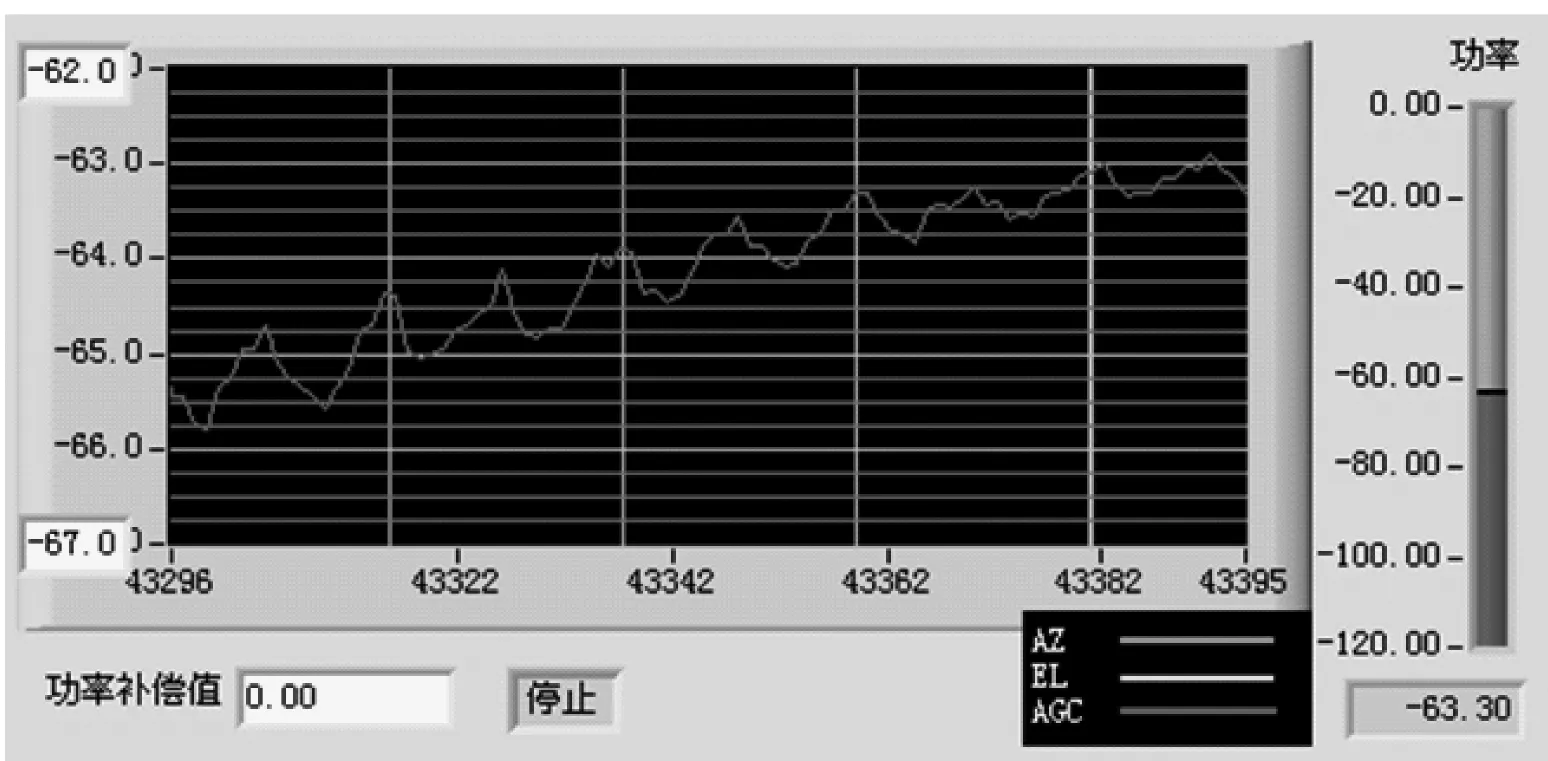
图3 主面圆锥扫描修正效果图
4 结果分析
图4是某机载动中通天线在实际飞行过程中的跟踪效果图,可以看出在整个飞行过程中,飞机一直在持续大动态的情况下,信号电平始终保持稳定,跟踪精度优于指标,满足数据通信的要求。
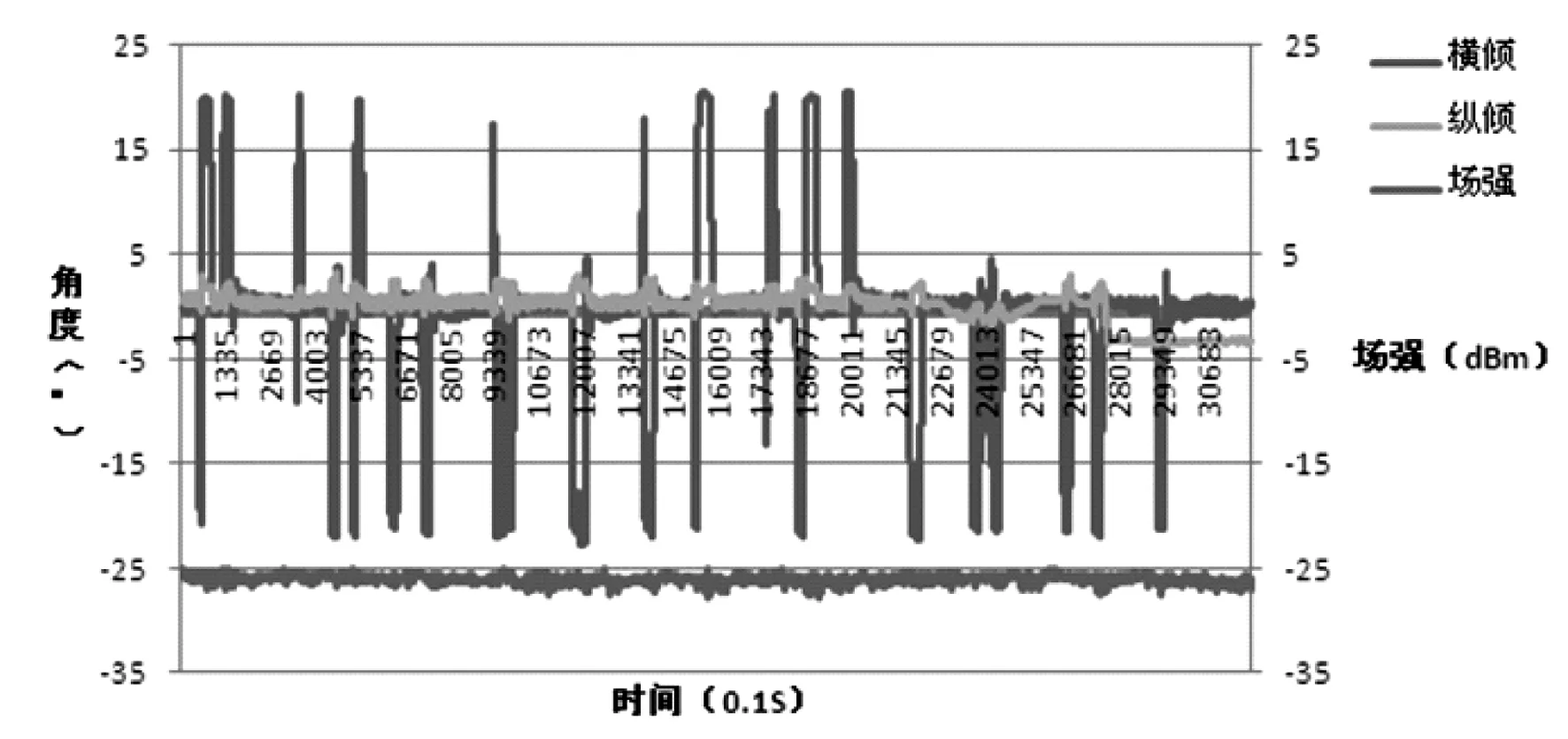
图4 跟踪效果图
5 结束语
引入GPS/北斗的速度信息作为观测量,通过卡尔曼滤波器对低精度的MEMS惯导进行误差修正,实现惯导姿态的稳定输出。天线跟踪过程中,在捷联惯导指向跟踪的基础上叠加主面圆锥扫描,解算方位、俯仰差电压。通过差电压修正,进一步消除惯导及标校误差,实现天线的稳定跟踪。该技术成功应用于多项工程中,并取得了良好效果。
[1] 魏英杰. 动中通地面站卫星天线伺服控制系统[J].无线电通信技术,2007,33(3):30-32.
[2] 温桂森. 动载体卫星通信天线控制数学模型[J].无线电通信技术,1997,23(4):36-40.
Design of In-motion antenna at Low Cost based on strapdown stabilization
HUANG Yuan-qing
(The54thResearchInstituteofCETC,ShijiazhuangHebei050081,China)
Aiming at the shortcomings of the precision of MEMS inertial navigation devices, such as the difficulty of seeking the north and the fast drift, the GPS/BDS velocity information is introduced and the Kalman filter algorithm is used to estimate the error for the stable output of inertial navigation. On the basis of strapdown stabilization, the scanning is superimposed and the error correction is carried out by using the synchronous satellite beacon. The experimental results show that the proposed method can achieve stable tracking of the antenna under large dynamic conditions.
MEMS;GPS/BDS;Kalman filtering;Strapdown stabilization;Scanning
2016-11-20
黄元庆(1984-),男,工程师,主要研究方向:伺服控制、软件开发.
1001-9383(2016)04-0036-05
TN965
A
猜你喜欢
保健与生活(2023年14期)2023-07-20 02:09:03
测控技术(2018年2期)2018-12-09 09:00:56
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
中学生数理化·八年级物理人教版(2017年10期)2018-01-22 03:03:52
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
百科探秘·航空航天(2017年3期)2017-07-12 14:13:48
百科探秘·航空航天(2017年4期)2017-07-10 07:57:48
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
火控雷达技术(2016年1期)2016-02-06 02:18:01
