
基于降维观测器的氨覆盖率自抗扰反馈控制器设计*
2016-06-12 10:36:06赵靖华胡云峰谭振江高炳钊吉林师范大学四平36000吉林大学汽车仿真与控制国家重点实验室长春3005
汽车技术 2016年5期
赵靖华 胡云峰 谭振江 高炳钊(.吉林师范大学,四平36000;.吉林大学汽车仿真与控制国家重点实验室,长春3005)
基于降维观测器的氨覆盖率自抗扰反馈控制器设计*
赵靖华1,2胡云峰2谭振江1高炳钊2
(1.吉林师范大学,四平136000;2.吉林大学汽车仿真与控制国家重点实验室,长春130025)
【摘要】针对尿素选择性催化还原系统(Urea-SCR系统)参数估计以及排放优化控制问题,设计了一款基于降维观测器的氨覆盖率自抗扰(ADRC)反馈控制器。借助enDYNA精确发动机模型软件中FTP75测试循环,进行瞬态测试仿真验证。结果表明,所设计的降维观测器能够满足估计误差要求;与调试好的PID控制器相比,所提出的氨覆盖率ADRC反馈控制器具有更好的排放控制效果和鲁棒性能。
1 前言
柴油机稀薄燃烧会产生更多的PM和NOx。为满足未来日益严格的NOx和PM排放法规限值,仅依靠柴油机的缸内减排技术是无法实现的,需要引入排放后处理技术[1]。尿素选择性催化还原(Urea-SCR)系统因具有不需额外燃油且尿素消耗相对较低等优势,近些年来已经在汽车领域占据一定优势[2]。
Urea-SCR技术的基本原理是利用NOx与氨(NH3)之间的氧化还原反应,降低NOx的排放水平。而Urea-SCR系统研究的主要挑战之一是同时实现较低氨逃逸量和较高NOx转化效率。目前较便捷且经济的方法是通过改进尿素喷射控制技术达到上述目标[3]。当前的尿素喷射控制方法主要集中在前馈控制设计或是利用线性模型进行的反馈控制器设计上[4~6]。文献[7]提出了一种基于逐步后退法(Back-stepping)的非线性氨覆盖率反馈控制技术,并取得了较好的排放控制效果。
与此同时,一些先进的非线性控制方法也在不断发展,如降维观测器技术[8]和自抗扰反馈控制技术[9]。郭宏燕等人利用降维观测器技术设计了一款车辆速度观测器,得到了较好的估计效果[10]。而自抗扰技术与现存的大多数方法不同,该技术能够对干扰实时估计并及时补偿。本文首先利用降维观测器技术设计一款氨覆盖率估计器,将其应用于氨覆盖率自抗扰控制器中,并提出一套完整的非线性反馈控制方案。
2 控制问题描述及面向控制系统建模
2.1控制问题描述
Urea-SCR化学反应示意如图1所示。
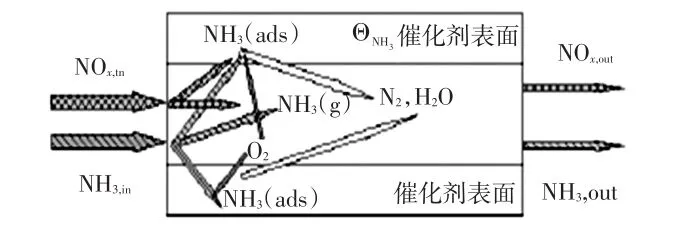
图1 Urea-SCR化学反应示意
发动机排出的NOx,in和添蓝溶液产生的NH3,in进入系统。在催化器内,部分NH3被吸附在催化剂表面,变成吸附态的氨NH3(ads),其余部分仍为气态氨NH3(g),并且这两部分可以相互转化,反应方程式为:

在催化器表面催化剂的作用下,吸附态的氨能够选择性地与NOx反应生成H2O和N2,当温度高于200℃时,该反应主要按照Eley-Rideal机制进行[11],反应方程式为:

同时,吸附态的氨能够被氧化成H2O和N2,反应方程式为:

经过上述化学反应,剩余的NOx(NOx,out)和氨(NH3,out)从Urea-SCR系统排出。此外,Urea-SCR系统的氨贮存能力与吸附态的NH3之比被定义为氨覆盖率(ΘNH3)。
Urea-SCR系统的控制目标是要同时实现较高的NOx转化效率和较低的氨逃逸,而氨覆盖率反馈跟踪控制可以同时实现上述控制要求[7,12]。
基于降维观测器技术设计一款氨覆盖率自抗扰反馈控制器,以欧6(EURO 6)的NOx排放标准为参考[1],提出的控制目标为:NOx排放平均水平在0.4 g/(kW·h)以下,并且氨逃逸在平均80×10-6以下。图2为该Urea-SCR系统控制框图。由传感器测得温度T、废气温度Tin、环境温度Tamb、废气质量流量以及NH3摩尔浓度CNOx、CNH3等信号,经氨覆盖率估计器计算得到氨覆盖率NH3,与理想氨覆盖率目标的差值信号作为氨覆盖率控制器的控制输入,控制器的氨喷射信号传输给Urea-SCR系统,完成整个闭环控制。为此,首先建立Urea-SCR系统的集中参数模型,并且根据该系统的非线性特点,提出一种面向控制的Urea-SCR系统模型。
2.2集中参数模型[13,14]
根据阿列纽斯方程,对化学反应过程的反应速率建模。方程(1)中的吸附速率(rads)和解吸附(rdes)速率为:

式中,cs为单位体积气体中活性原子浓度,其值为7.30 mol/m3;Sc为1 mol活性原子的表面积,其值为581 m2/mol;αprob为粘着率,其值为1.11×10-3;R为气体常数,其值为8.3145 J/(mol·K);MNH3为NH3的摩尔质量;kDes为解吸附速率因子,其值为0.514/s;Ea,Des为解吸附活性能,其值为15.2 J/mol。

图2 基于估计器的氨覆盖率跟踪控制系统框图
方程(2)中的还原速率(rSCR)为:

式中,kSCR为Urea-SCR反应速率因子,其值为2.6776 m2/s;为Urea-SCR反应活性能,其值为28471 J/mol。
方程(3)对应的反应速率(rOx)为:

式中,kOx为NH3氧化反应速率因子,其值为3.34×106/s;Ea,Ox为NH3氧化反应活性能,其值为1.16×105J/mol。
由于柴油机废气中氧浓度总是很高,相比于其它气体来说十分充足,所以大多数的Urea-SCR反应速率对氧浓度的变化都不敏感,可以忽略。
假设该催化反应是一个连续搅拌釜式反应器(CSTR),催化系统的所有状态是均质的。基于上述假设,应用质量平衡,Urea-SCR系统模型可以由常微分方程(ODEs)表示:

Urea-SCR系统中气体成分的流量与浓度之间的关系为:

式中,RS,EG为排气气体常数,其值为288 J/(kg·K);Pamb为大气压。
将式(4)~式(6)以及式(8)代入式(7)中得:

其中,
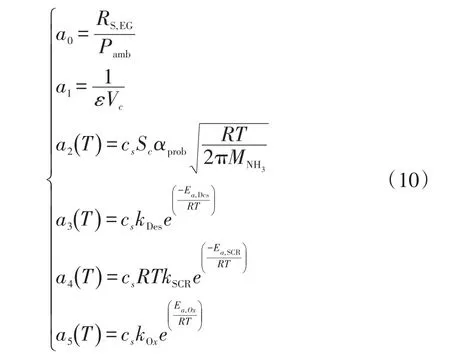
式中,ε为空隙比,其值为0.81;Vc为Urea-SCR系统的总容积,其值为0.01 m3。
3 氨覆盖率降维估计器设计
为了充分保持系统的非线性,同时尽可能简化控制器设计,基于Urea-SCR系统机理模型设计一款氨覆盖率降维观测器。在假定NOx和NH3的测量较为准确的前提下,利用两者的误差构成校正项。
3.1非线性降维观测器设计
选取x1=CNOx、x2=CNH3以及z=ΘNH3为状态变量,控制输入为为了估计氨覆盖率z,x1和x2被视作测量输出,即并且,选取p为包含和T等时变参数的向量,则方程(9)整理为:

其中,

由于催化器内部氨覆盖率的值直接影响到NOx和NH3的浓度,所以利用两者浓度的真实测量值和估计值ˆ的差构成校正项,设计如下形式的非线性降维观测器。

式中,L∈R1×2为待定计算时的不变观测器增益。
3.2氨覆盖率降维观测器仿真结果
enDYNA是TESIS公司开发的发动机精确建模软件[15]。基于该平台,以某款轻型柴油机参数数据为基础,建立配有Urea-SCR系统的精确仿真模型。该发动机有4个缸,排量为1.9L,配备涡轮增压和进气中冷系统,最高转速为4 500 r/min。仿真研究在瞬态测试循环FTP75环境下进行,该测试循环可以评价连续可变工况条件下的控制系统性能。所选enDYNA发动机模型在FTP75测试循环下前500 s的工况变化过程如图3所示。
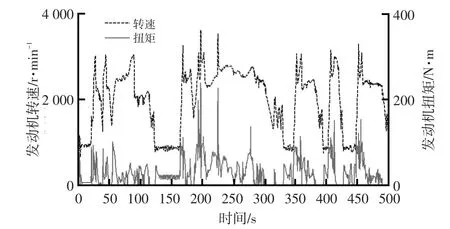
图3 FTP75部分瞬态工况条件
具有代表性的降维估计器对比仿真结果如图4和图5所示。可知所提出的观测器平均误差率在2%以下,最高误差率不超过7%,能够满足Urea-SCR系统估计性能要求。

图4 降维估计器效果
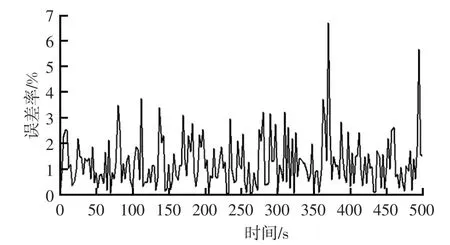
图5 降维估计器误差率
4 氨覆盖率自抗扰反馈控制器设计
4.1面向氨覆盖率跟踪控制问题的系统模型
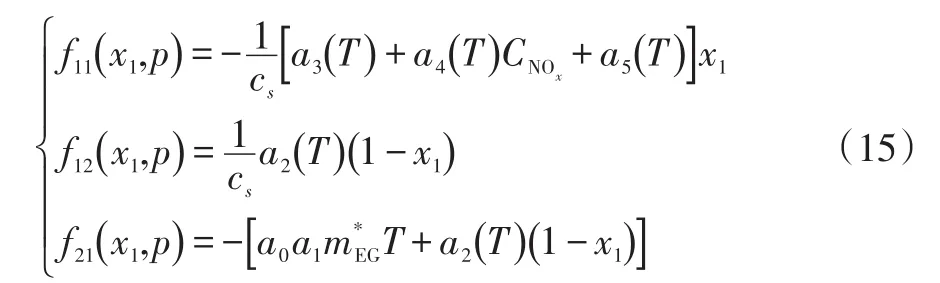
为了实现氨覆盖率控制,考虑的状态量仅为CNH3和定义状态变量,时变参数,控制输入变量,被控输出为基于式(9)SCR模型,得到系统面向控制模型,该系统为非线性且参数可变系统。

其中,
4.2自抗扰跟踪控制器设计
自抗扰技术主要思想是将未知动态和外部干扰都看作总干扰,采用线性扩张状态观测器(Linear Extend⁃ed State Observer,LESO)实时估计总干扰,并且在反馈控制算法中对干扰进行补偿。应用此方法的好处为在设计控制器前不需要知道精确的系统模型。针对前文所述的Urea-SCR系统2阶模型式(14),研究设计一款基于自抗扰技术的反馈控制器,控制系统结构如图6所示。其中,针对式(14)中第1个状态设计自抗扰控制器ADRC1,针对第2个状态设计自抗扰控制器ADRC2。
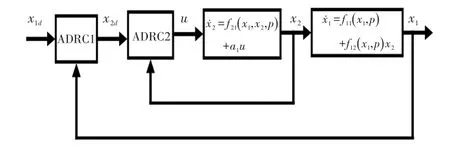
图6 自抗扰控制系统控制框图
4.2.1ADRC1控制器设计
ADRC控制结构示意如图7所示。可知,所提出的ADRC控制器包括线性状态误差反馈(Linear State Error Feedback,LSEF)和LESO两部分。其中,x1d代表控制目标,z1为x1的估计值,z2为总干扰的估计值,u0代表LSEF的输出,b0为控制量系数b的估计值。
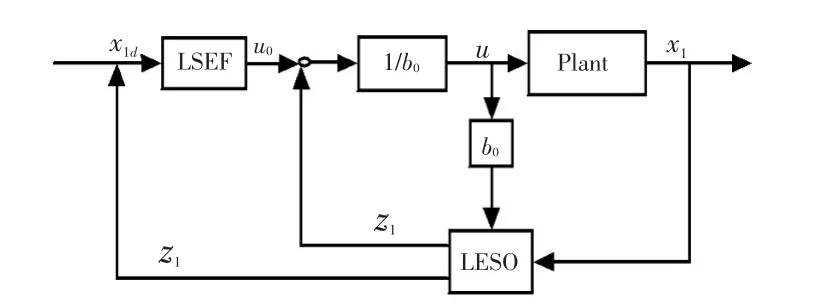
图7 ADRC控制结构示意
大多数的古典状态观测器都依赖于对被控对象动态模型精确度,LESO是例外。为了简化控制器ADRC1的设计方法,研究将式(14)中的第1个状态方程改写为:


将x2看作是虚拟的控制输入为扩展状态部分为未知。研究将2阶LESO设计成如下形式:

L1为LESO的观测器增益。如果控制增益选取合理,估计器能够跟踪状态量
由式(16)~式(18)可知,LSEF部分可以推导为:

虚拟控制输入x2d可表示为:

4.2.2ADRC2控制器设计
采用同样方法,针对式(14)中第2个方程设计控制器ADRC2,以保证x2跟踪上x2d。将x2的动态重写成以下形式:

研究将2阶LESO设计为:
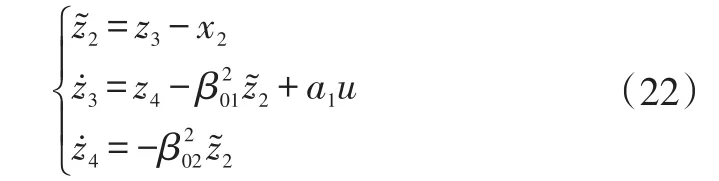
L2为LESO的观测器增益。如果控制增益选取合理,估计器能够跟踪状态量z3→x2,
由式(21)和式(22)可知,LSEF部分可以推导为:

其中,e2=x2d-z3,控制输入u可表示为:

将所设计的降维观测器与自抗扰反馈控制器结合,提出基于降维观测器的氨覆盖率自抗扰反馈跟踪控制器,并对控制效果做出讨论。
4.3基于降维观测器的氨覆盖率自抗扰反馈控制器仿真结果
仿真在enDYNA发动机模型FTP75瞬态测试循环下进行,工况变化如图3所示。发动机的NOx排放为对氨覆盖率跟踪控制的主要干扰,其在FTP75测试循环前500 s变化过程如图8所示。
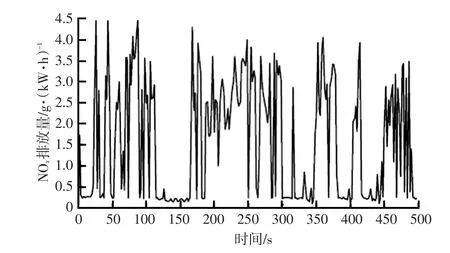
图8 发动机NOx排放
结合所提出的降维氨覆盖率观测器,对ADRC控制器做阶跃跟踪测试,代表性的仿真结果如图9所示。氨覆盖率在初始阶段设置值为0.2;在第50 s时刻阶跃到0.4;在第150 s时刻该值阶跃下降到0.3。为了验证跟踪效果,目标值在后续过程中还有一系列阶跃变化。上述目标值的改变能够测试控制器的瞬态跟踪性能。该控制输入氨的摩尔流量被限定为0.003 mol/s,并且喷射器的执行情况也显示在图9中。在控制目标阶跃变化时,出现了几次不超过10 s的调节时间,其中第150 s时刻的调节时间最长。这是因为在阶跃下降阶段,氨喷射执行器失效,而此时排出的NOx不足以迅速降低氨覆盖率。试验表明,所提出的基于自抗扰技术的非线性氨覆盖率跟踪控制器在瞬态工况强烈的外界干扰下,具有较强的跟踪能力。
结合所提出的降维氨覆盖率观测器,基于相同的Urea-SCR系统总容积和长度,对ADRC控制器和最优PID控制器排放效果做对比。设定的排放控制目标为:NOx排放的平均水平在0.4 g/(kW·h)以下,并且氨逃逸在平均80×10-6以下。由发动机排出,进入Urea-SCR后处理系统的NOx输入量与两个控制器的输出排放控制效果比较如图8和图10所示。可知,两种控制方法的转化效率都能达到90%以上,并且控制效果基本一致。两种控制器的氨逃逸量如图11所示。可知,所提出的自抗扰控制器的控制效果明显要好很多,相比于PID控制器的平均氨逃逸量,所提出的ADRC控制器要低10%以上。并且,PID控制器的震荡更为强烈,所提的自抗扰控制器具有更好的鲁棒性。
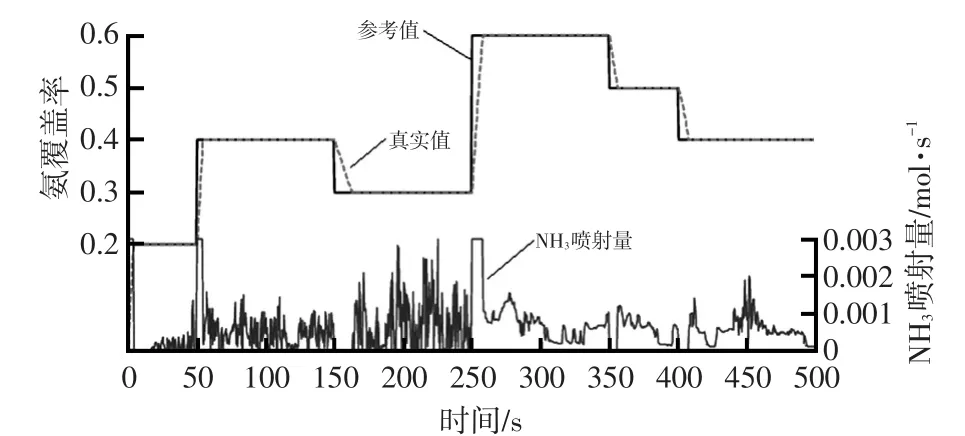
图9 氨覆盖率阶跃跟踪控制效果

图10 NOx排放对比
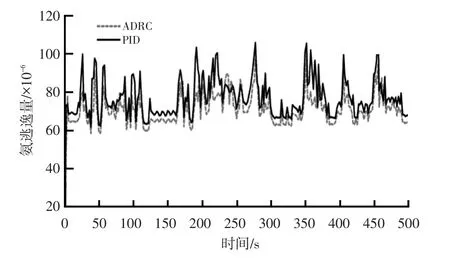
图11 NH3排放对比
5 结束语
a.利用降维观测器技术设计氨覆盖率估计器,并将其应用于氨覆盖率自抗扰控制器中,是一套完整的Urea-SCR系统排放优化控制方案;
b.所提出的观测器平均误差率在2%以下,最高误差率不超过7%,能够满足Urea-SCR系统估计性能要求;
c.相比于PID控制器的平均氨逃逸量,所提出的ADRC控制器要低10%以上。并且,PID控制器的震荡更为强烈,所提出的ADRC控制器具有更好的鲁棒性。
参考文献
1Guzzella L,Onder C H.Introduction to Modeling and Con⁃trol of Internal Combustion Engine Systems.Switzerland:Springer,2010.
2楼狄明,姚笛,高帆.SCR装置对共轨柴油机稳态颗粒排放特性影响的研究.内燃机工程.2013,35(2):14~19.
3Chiang C J,Kuo C L,Huang C C,et al.Model predictive control of SCR aftertreatment system.IEEE Conference on Industrial Electronics and Applications,2010:2058~2063.
4Willems F,Cloudt R,Vanden Eijnden E,et al.Is Closed-Loop SCR Control Required to Meet Future Emission Tar⁃gets?SAE Technical Papers,2007-01-1574.
5Devarakonda M,Parker G,Johnson J H,et al.Model-based estimation and control system development in a urea-SCR aftertreatment system.SAE International Journal of Fuels and Lubricants,2008,1:646~661.
6Devarakonda M,Parker G,Johnson J H,et al.Model-based control system design in a urea-SCR aftertreatment system based on NH3sensor feedback.International Journal of Au⁃tomotive Technology,2009,10(6):653~662.
7Hsieh M F,Wang J.A two-cell backstepping-based control strategy for diesel engine selective catalytic reduction sys⁃tems.Control Systems Technology,IEEE Transactions on,2011,19(6):1504~1515.
8Gao B,Chen H,Zhao H,et al.A reduced-order nonlinear clutch pressure observer for automatic transmission.Control Systems Technology,IEEE Transactions on,2010,18(2):446~453.
9Tian G,Gao Z.Benchmark tests of active disturbance rejec⁃tion control on an industrial motion control platform.Ameri⁃can Control Conference.2009:5552~5557.
10Guo H,Chen H,Cao D,et al.Design of a reduced-order non-linear observer for vehicle velocities estimation.IET Control Theory&Applications,2013,7(17):2056~2068.
11Willi R.Low-temperature selective catalytic reduction of NOx-catalytic behavior and kinetic modeling:[Academic dissertation].Zurich:ETH Zurich,1996.
12Hsieh M F,Wang J.Diesel Engine Selective Catalytic Re⁃duction(SCR)Ammonia Surface Coverage Control Using a Computationally-Efficient Model Predictive Control Assist⁃ed Method.ASME 2009 Dynamic Systems and Control Conference.American Society of Mechanical Engineers,2009,1:865~872.
13Heiredal M L,Jensen A D,Thogersen J R,et al.Pilotscale investigation and CFD modeling of particle deposi⁃tion in low-dust monolithic SCR deNOxcatalysts.AIChE Journal,2013,59(6):1919~1933.
14Kota A S,Luss D,Balakotaiah V.Modeling studies of low temperature aerobic NOxreduction by a sequence of LNTSCR catalysts.AIChE Journal,2013,59(9):3421~3431.
15Philipp O,Huber M.Development and Test of ECU Func⁃tions for OBD with enDYNA.Proc JSAE Annual Congress,2004.
16Hsieh M F.Control of diesel engine urea selective catalytic reduction systems:[Academic dissertation].Ohio:The Ohio State University,2010.
(责任编辑晨曦)
修改稿收到日期为2016年1月1日。
主题词:Urea-SCR系统降维观测器氨覆盖率自抗扰技术
Design of an ADRC Feedback Controller for Ammonia Coverage Ratio based on a Reduced-Order Observer
Zhao Jinghua1,2,Hu Yunfeng2,Tan Zhenjiang1,Gao Bingzhao2
(1.Jilin Normal University,Siping,136000;2.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun,130025)
【Abstract】For parameter estimation and emission optimal control of urea selective catalytic reduction(SCR)system,an active disturbance rejection control(ADRC)feedback controller for ammonia coverage ratio is designed based on a reduced-order observer.A transient simulation is conducted to verify the effectiveness of the proposed control strategy with FTP75 test cycle of enDYNA engine modeling software.The results indicate that the designed reduced-order observer can meet the requirements of the estimation error.Compared with the tuned PID method,the proposed ammonia coverage ratio ADRC feedback controller has better emission control effect and robustness.
Key words:Urea-SCR System,Reduced-order observer,Ammonia coverage ratio,ADRC technology
中图分类号:U464.12
文献标识码:A
文章编号:1000-3703(2016)05-0037-06
*基金项目:国家自然科学基金重点项目(61034001);吉林省科技发展计划(20130101179JC-16)。
猜你喜欢
今日农业(2022年15期)2022-09-20 06:54:16
车主之友(2022年4期)2022-08-27 00:57:12
今日农业(2021年21期)2021-11-26 05:07:00
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
海峡姐妹(2019年12期)2020-01-14 03:24:40
天津教育·下(2018年9期)2018-07-13 08:25:47
西南交通大学学报(2016年6期)2016-05-04 04:13:05
计算物理(2014年1期)2014-03-11 17:00:18
燕山大学学报(2014年1期)2014-03-11 15:28:11
计算机工程(2014年6期)2014-02-28 01:28:03
