
基于三维激光扫描点云的矿山巷道三维建模方法研究
2016-06-08 01:03江记洲郭甲腾吴立新杨宜舟周文辉张培娜
采矿与岩层控制工程学报 2016年2期
江记洲,郭甲腾,吴立新,2,杨宜舟,周文辉,张培娜
(1.东北大学 测绘遥感与数字矿山研究所,辽宁 沈阳 110819;2.中国矿业大学 环境与测绘学院,江苏 徐州 221008)
基于三维激光扫描点云的矿山巷道三维建模方法研究
江记洲1,郭甲腾1,吴立新1,2,杨宜舟1,周文辉1,张培娜1
(1.东北大学 测绘遥感与数字矿山研究所,辽宁 沈阳 110819;2.中国矿业大学 环境与测绘学院,江苏 徐州 221008)
[摘要]基于点云坐标投影转换,提出了一种自动化的巷道三维建模方法。该方法依据矿山巷道的空间几何特征,采用圆柱面投影将三维点云转换为二维离散点,然后应用分治算法进行三角剖分,同时保存二三维点云及三角网之间的拓扑关系,最后重建三维巷道模型。基于此方法,开发了一个实验原型系统,并针对国内地下矿山的一段巷道开展了激光扫描和三维重建实验,成功地重建了巷道三维模型。实例结果表明,本文所提出的适用于巷道单站点激光点云的自动处理和三维重建的方法不仅仅局限于矿山应用,还可进一步推广应用于其他地下工程,如地铁巷道的三维建模等。
[关键词]三维激光扫描;点云;矿山巷道;三角网;三维建模
三维激光扫描通过记录激光脉冲的方向及目标表面反射激光的时间(或相位差)来获取目标点三维坐标[1],可获取扫描物体表面的散乱无序的高精度点云数据集,其具有数据获取高效、数据精度精确、测量非接触等优点[2-3]。因此,利用激光点云数据集可构建更为精细的三维模型。在矿山中,巷道是井下各种人工要素的主要空间载体,巷道数据与模型是数字矿山[4-6]的主要构成部分。基于三维激光扫描点云可建立更为精细的巷道三维模型,对矿山安全生产和施工决策[7]等方面具有现实指导意义[8]。传统的巷道三维建模方法,如三棱柱体元[9]、约束三角网[10]及Bezier曲线[11]等主要基于断面特征点、巷道中线、导线坐标数据联合构建模型[12],模型受建模方法、数据精度的影响,其构建的三维模型不够精细。在基于激光点云三维建模技术中,主要采用Geomagic Studio,Imagewave,CopyCAD,Rapidfrom等[13]软件处理点云数据。由于上述软件中的三维建模方法需频繁的人工交互,建模效率较低,且自动化程度不高,因此,亟需研究一种高效且自动化的基于三维激光扫描点云的巷道三维建模方法。
1基于三维激光点云巷道建模关键技术
三维激光点云的主要特征有:
(1)海量性即点云点数可达到百万级、千万级甚至亿级。
(2)离散性即点与点之间相互独立,无任何拓扑关系,即不能表征目标体表面的拓扑关系。
(3)高精度性如50m的距离内对目标体进行点云数据采集,其扫描精度±6mm。
(4)丰富性除了点云空间坐标,三维激光扫描仪还可获取目标体激光反射强度等[14]。
将三维激光扫描技术应用到巷道建模中时,虽然三维激光点云的海量性导致构建巷道模型复杂度高,且其离散性导致难以构建点云之间正确拓扑关系,但是其高精度性和丰富性可保证构建精细巷道模型。
1.1基于三维激光点云巷道建模分析
本文从单站点三维激光扫描点云入手研究,针对三维激光扫描仪获取的单站点三维巷道点云(下文简称巷道点云),需要正确计算各点之间的拓扑关系。通常需将巷道点云投影到平面上,然而扫描巷道表面时视场较大,若将巷道点云直接投影到某一平面,投影后的点之间会产生重叠、遮挡等问题。因此,通过一般的平面投影不能正确计算巷道点云之间拓扑关系。在巷道中,巷道点云中各点对于激光发射中心都具有可视性,若沿巷道轴向延伸将其投影到主轴平行于巷道中心轴的圆柱面上,则投影后的点之间不会重叠,那么可通过三角网准确构建巷道点云间拓扑关系。综上所述,基于巷道点云建模概括分为点云数据预处理和基于圆柱面投影构建巷道点云之间拓扑关系两部分。
(1)巷道点云预处理主要是点云的仿射变换(公式1),巷道点云相对坐标系的Y轴与巷道延伸方向偏移的角度γ(扫描操作的影响),将巷道点云绕Z轴旋转γ,使巷道点云的相对坐标系的X轴平行于巷道的延伸方向,Z轴沿铅垂线向上。
(1)

分析可知,需通过圆柱面投影的方法解决巷道点云数据的二维与三维相互转化的难点,且在转化的过程中不能破坏数据之间的拓扑关系及模型精度;需完成点云数据二维与三维转化过程中“割裂”数据的“拼接”难点,从而构建拓扑关系完整的三维巷道模型。因此,本文研究的重点是巷道点云的投影转换和巷道表面三角网的“拼接”,为基于单站点巷道点云建模提供理论依据。
1.2巷道点云投影
圆柱形投影面与巷道关系见图1。巷道位于相对空间坐标系O-XYZ中,O点是三维激光扫描仪扫描中心;rf是模拟巷道表面;cf是模拟圆柱形投影面,ab是圆柱投影面的主轴,ab平行于巷道轴向延伸方向(巷道延伸方向是X轴或Y轴取决于三维激光扫描仪的初始设置)。本文研究的是Y轴平行于巷道轴向延伸方向,圆柱形投影面所在圆柱体底面半径为R(R值需在阈值内,否则会导致生成的三角网错误),R值计算见公式(2)(xmin和ymin分别是巷道点云x和y最小值):
(2)
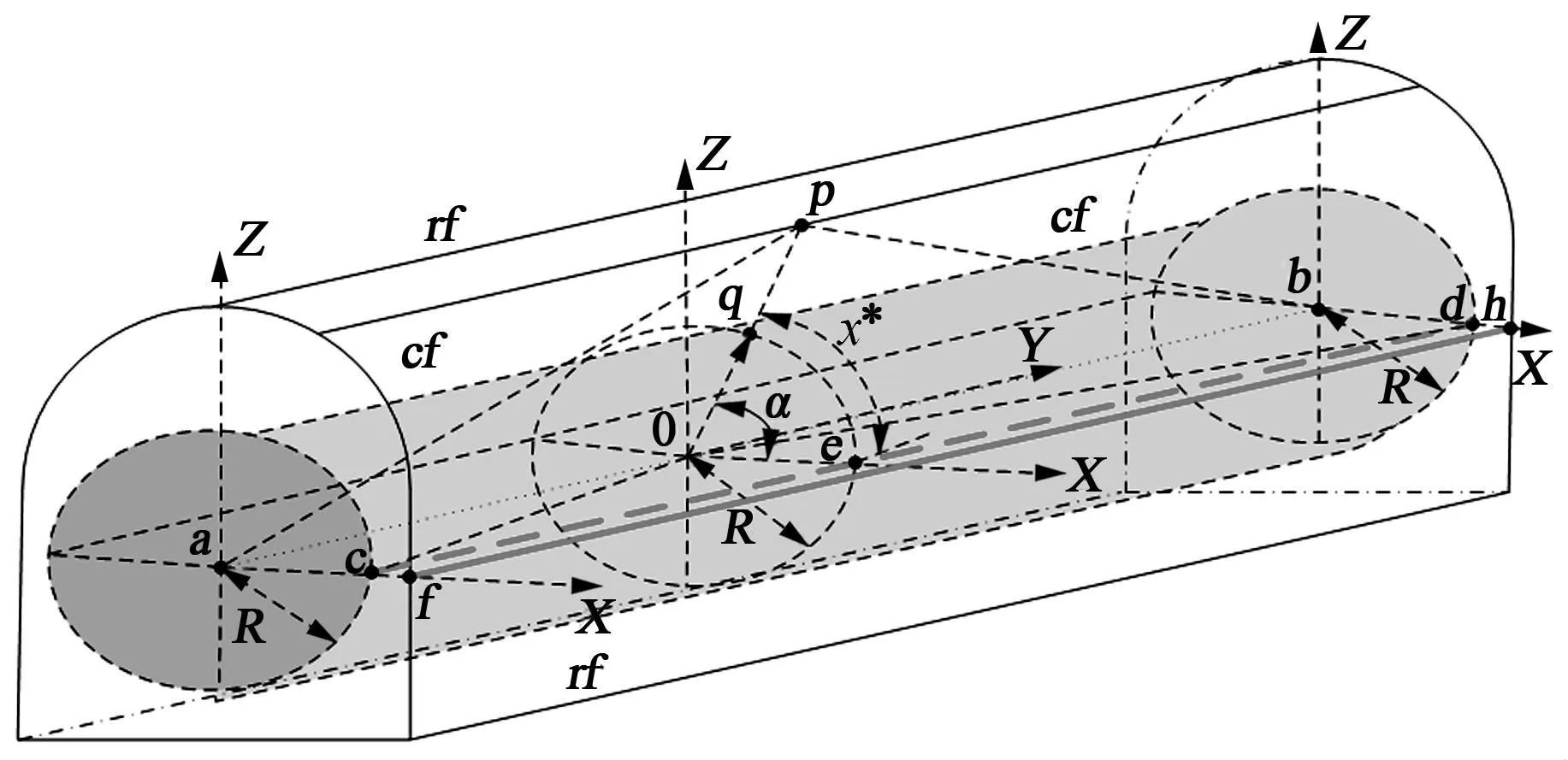
图1 圆柱投影面与巷道实体示意

(3)
巷道点云经过表1中的投影坐标计算等式,得到巷道投影点Q各点二维投影坐标。通过巷道点云投影模型,分别计算6个区域不同区域巷道点云的投影坐标,将巷道点云转换为二维投影点。通过分治算法三角剖分巷道点云投影点构建其拓扑关系,然后通过二维拓扑三角网构建巷道表面三维三角网,由于圆柱形投影面展开为二维后,在cd处

表1 巷道点云区域分布及对应投影点坐标计算
会形成一个“裂缝”,巷道模型表面三角网会在fh处形成一个“裂缝”。圆柱形投影面上cd对应巷道三维模型中fh,需对“裂缝”fh“拼接”构建完整拓扑关系的巷道三维模型。
1.3巷道模型表面三角网“拼接”
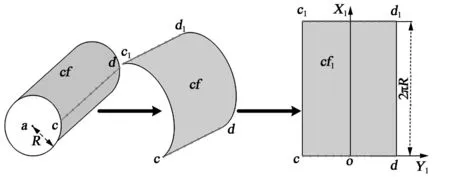
图2 圆柱投影面展开

yi=ymin+i·0.01(0≤i≤(ymax-ymin)/0.01)
(4)
(2)每个插入点pInserti对应2个投影点(在cd处展开时一分为二),2个投影点的点号相等,对应2个投影点分别为:
(5)
(6)

(4)根据巷道点云与巷道投影点之间一一对应关系构建拓扑完整的巷道表面三角网,如图3所示,所以巷道三维三角网的拓扑关系与巷道点云投影点二维三角剖分后构建的拓扑关系一致。
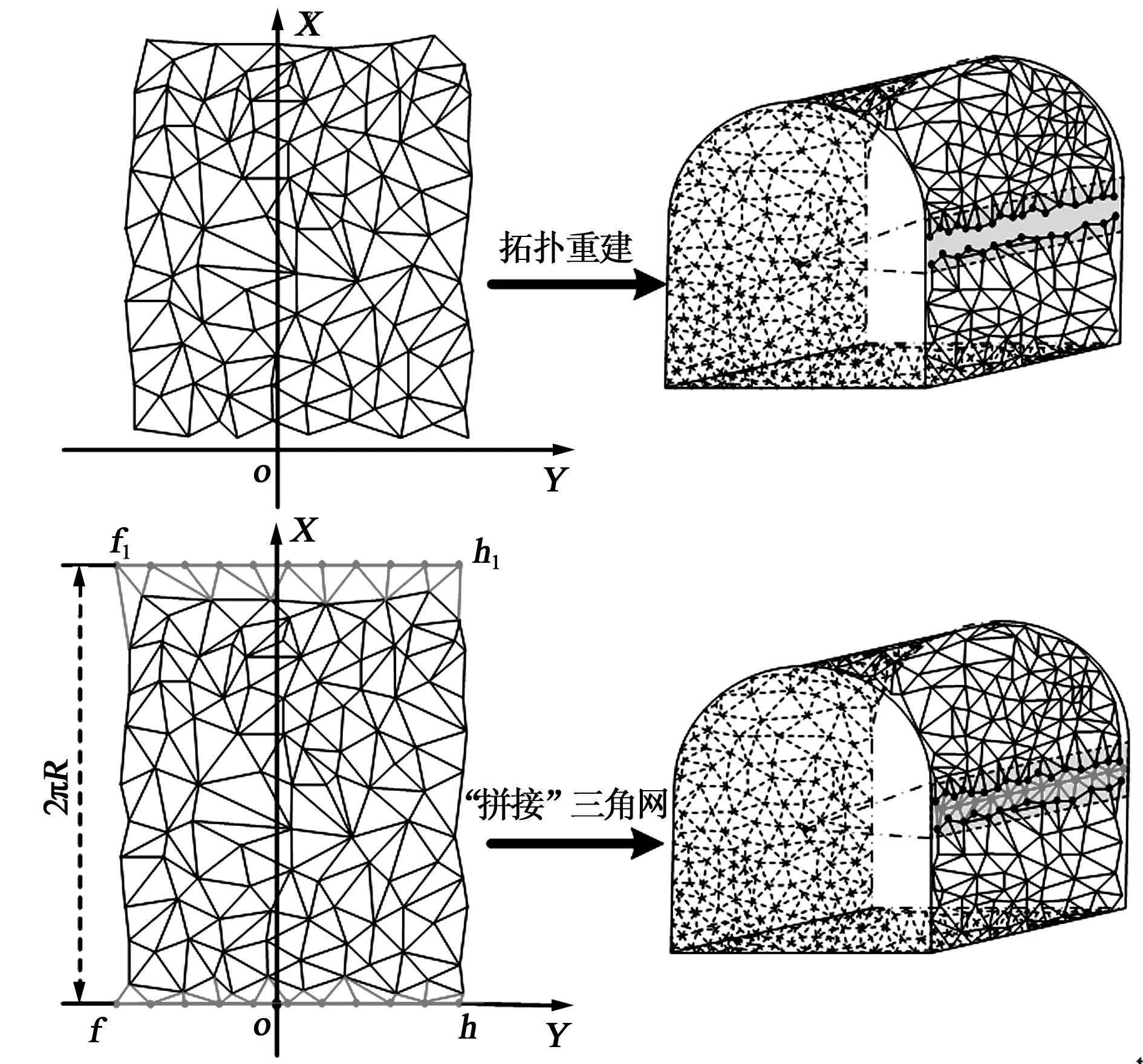
图3 “裂缝”拼接前后巷道表面TIN网模型
在以上过程中,巷道表面三角网中的点云精度未变,巷道模型表面三角网精度正相关于原始巷道点云精度,所以巷道模型的精度可得到保障。
2应用与分析
2.1实验环境与实验数据
实验通过C++,OpenGL编程,在Microsoft Visual Studio 2008上编译开发。计算机配置:CPU/酷睿i5 2.4GHz,内存/DDR3 8G。
实验数据是在国内某金属矿山巷道采集的单站点激光点云,该矿山巷道长44m,采集的巷道点云有9671938个点(点精度为6mm)。如图4巷道三维激光扫描点云的相对坐标系的Y轴方向与巷道的延伸方向有一个夹角γ(14.8°),点云需要绕Z轴旋转14.8°。
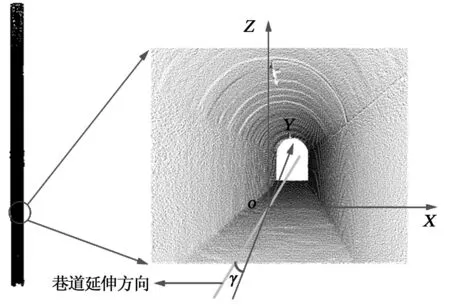
图4 巷道点云示意
2.2巷道建模结果
通过靶标对使用的三维激光扫描仪进行测试,并对获得的巷道点云数据进行精度分析与评定。采用前述方法构建的模型精度取决于所获取点云的精度,通过在室外建立控制网检校场对点云数据进行精度分析与评定,扫描的距离为40m和80m时点位精度分别为±4.7mm和±6.3mm。因此,利用上述的巷道点云精度保障了所构建的巷道模型的精度,图5为基于圆柱形投影面方法构建的巷道建模结果。
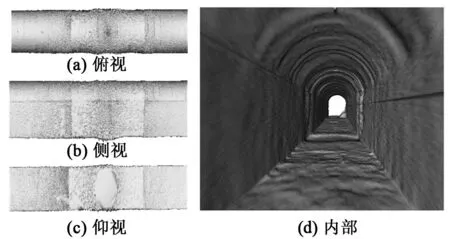
图5 巷道模型各视角效果
2.3测试结果对比
三维激光扫描点云进行建模最常用的软件是Raindrop公司的Geomagic Studio软件,该软件应用范围广,是传统的点云建模软件[13]。为比较应用本文方法开发的巷道点云建模实验原型系统和Geomagic Studio的构网效率,从上述巷道点云数据中分别截取11组数量不同的巷道点云(相邻组点数从500000递增到5500000,每组数据间隔点数为500000)。各组巷道点云建模时间统计见图6(横坐标为选取巷道点数量,纵坐标为耗费时间)。
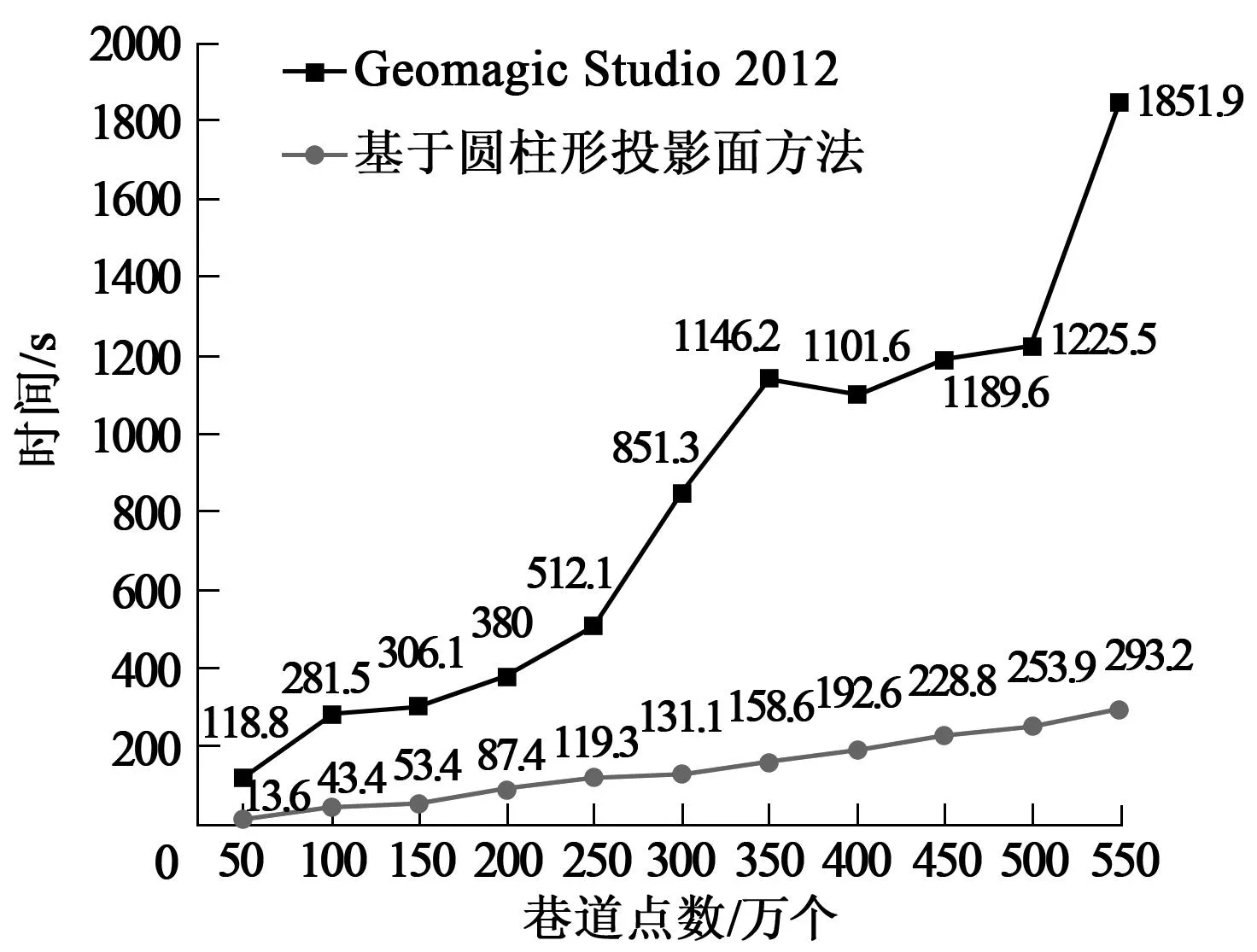
图6 构建巷道模型时间对比
由图6可知,当截取巷道点云数量为50万个时,基于圆柱形投影面巷道建模方法耗时13.6s,Geomagic Studio耗时118.8s,此情况下本文的方法比Geomagic Studio效率高。当参与构建巷道模型点云数量增加时,本文提出的方法耗时增加不明显,而Geomagic Studio耗时增加明显。当点云数量增加到550万个时,本文提出的方法效率比Geomagic Studio提高了6.3倍。本实验开发的原型系统自动构建巷道模型,中间不含人工交互,而Geomagic Studio需要人工交互填充孔洞。由此可见,本文提出的方法不仅构建巷道三维模型具有较高的效率,且具有自动化建模的特点。
3结论
针对单站点三维激光扫描点云提出了一种自动化的点云的巷道建模方法,该方法可较快实现点云数据的自动化建模。实践表明:本文提出的方法构建的巷道三维模型不仅准确且具有很高的精度,能更为精确地表达巷道内部的环境。同时,实验将本文方法与Geomagic Studio方法的建模效率进行对比,结果表明本文方法不仅具有较高的效率,且具有自动化的特点。基于圆柱形投影面的方法为基于单站点巷道点云的建模提供了一种可行的方法,为后续的基于多站点巷道点云的建模提供了研究基础。同时,本文方法不仅局限于矿山巷道的应用,还可应用于铁路隧道,地铁隧道等地下工程的三维建模。
[参考文献]
[1]Staiger R.Terrestrial laser scanning technology,systems and applications[C].2nd FIG Regional Conference Marrakech,Morocco.2003.
[2]Xiong X,Adan A,Akinci B,et al.Automatic creation of semantically rich 3D building models from laser scanner data[J].Automation in Construction,2013(31): 325-337.
[3]Gigli G,Morelli S,Fornera S,et al.Terrestrial laser scanner and geomechanical surveys for the rapid evaluation of rock fall susceptibility scenarios[J].Landslides,2014,11(1): 1-14.
[4]吴立新.数字地球、数字中国与数字矿区[J].矿山测量,2000(1):6-9,62.
[5]吴立新,殷作如,钟亚平.再论数字矿山:特征、框架与关键技术[J].煤炭学报,2003,28(1): 1-7.
[6]谭得健,徐希康,张申.浅谈自动化、信息化与数字矿山[J].煤炭科学技术,2006,34(1): 23-27.
[7]Gao F,Stead D,Kang H,et al.Discrete element modelling of deformation and damage of a roadway driven along an unstable goaf—A case study[J].International Journal of Coal Geology,2014(127):100-110.
[8]Van Gosliga R,Lindenbergh R,Pfeifer N.Deformation Analysis of a Bored Tunnel by Means of Terrestrial Laser Scanning International Archives of Photogrammetric [J].Remote Sensing and Spatial Information,2006(36): 115-118.
[9]程朋根,刘学斌,史文中,等.一种基于似三棱柱体元的地质三维建模方法研究[J].东华理工学院学报,2004(1):73-79.
[10]孙卡,翁正平,张志庭,等.基于约束三角剖分的三维巷道建模方法[J].矿业研究与开发,2007,27(5):64-65.
[11]张海明,孙燕,郭丹.基于OpenGL的三维虚拟煤矿系统的实现[J].科学技术与工程,2007(4):643-645.
[12]王建民.三维巷道建模及其应用研究[D].太原:太原理工大学,2005.
[13]胡影峰.Geomagic Studio软件在逆向工程后处理中的应用[J].制造业自动化,2009(9): 135-137.
[14]王玉鹏,卢小平,葛晓天,等.地面三维激光扫描点位精度评定[J].测绘通报,2011(4):10-13.
[责任编辑:施红霞]
3-D Modeling Method of Mine Roadway Based on 3-D Laser Scanning Point Cloud
JIANG Ji-zhou1,Guo Jia-teng1,Wu Li-xin1,2,YANG Yi-zhou1, ZHOU Wen-hui1,ZHANG Pei-na1
(1.Remote Sensing and Digital Mine Institute,Northeastern University,Shenyang 110819,China;2.Environment & Surveying College,China University of Mining & Technology,Xuzhou 221008,China)
Abstract:An automation 3-D modeling method was put forward based on projection transformation of point cloud coordinate.On the basis of space geometric features of mine roadway,3-D point cloud was transformed to 2-D discrete points by cylindrical plane projection,then triangulation was applied based on sub-rule algorithm,topological relation of 2-D,3-D point cloud and triangular net were saved at the same time,3-D roadway model was rebuilt at the end.An original experimental model was developed based on it.Laser scanning and 3-D rebuilt experiment was applied in one section of roadway of mine at home,3-D model was rebuilt successfully.The results showed that the method laser point cloud automatic processing roadway single station and 3-D rebuilt method not only suit for mine,but also could be applied in other underground project,such as 3-D modeling of sub way tunnel.
Key words:3-D laser scanning;point cloud;mine roadway;triangle net;3-D modeling
[收稿日期]2015-08-19
[基金项目]国家自然科学基金资助项目(41001228);中央高校基本科研业务费专项资金资助(N140104002);辽宁省科学技术基金项目(2015020581)
[作者简介]江记洲(1991-),男,河南固始人,硕士研究生,研究方向为三维地矿建模。
[中图分类号]TD178
[文献标识码]A
[文章编号]1006-6225(2016)02-0109-05
矿山空间信息学与数字矿山
[DOI]10.13532/j.cnki.cn11-3677/td.2016.02.029
[引用格式]江记洲,郭甲腾,吴立新,等.基于三维激光扫描点云的矿山巷道三维建模方法研究[J].煤矿开采,2016,21(2):109-113.
猜你喜欢
软件导刊(2020年11期)2020-01-05
智能计算机与应用(2017年2期)2017-05-04
中国科技纵横(2017年3期)2017-03-29
中小企业管理与科技·上旬刊(2016年12期)2017-01-05
科学与财富(2016年15期)2016-11-24
电脑知识与技术(2016年24期)2016-11-14
科技视界(2016年4期)2016-02-22
绿色科技(2015年6期)2015-08-05
科学时代·上半月(2013年7期)2013-07-29
卷宗(2013年2期)2013-05-14
