参考点随机子空间模态参数识别方法的效率探讨
2016-06-08 03:29邱胜华
公路与汽运 2016年3期
关键词:桥梁
邱胜华
(中铁十二局集团第一工程有限公司,陕西西安 710038)
参考点随机子空间模态参数识别方法的效率探讨
邱胜华
(中铁十二局集团第一工程有限公司,陕西西安 710038)
摘要:结构模态参数的获取对结构响应分析、状态监测、振动控制有着非常重要的意义。在桥梁健康监测领域,基于环境激励的随机子空间方法是模态参数识别中最先进的方法之一。基于参考点的随机子空间方法不仅能很好地适应大型工程结构测点分组测量的特点,而且较传统的随机子空间方法减少了识别过程中的计算量,但对于其识别精度还没有详细考证。文中在阐述该方法相关理论的同时,以一座梁桥的数值模拟算例进行分析,结果表明基于参考点的随机子空间方法的识别结果准确可靠,并对选择参考通道的方法提出了建议。
关键词:桥梁;模态参数识别;随机子空间;识别效率
准确的结构模态参数识别对于结构响应分析、状态监测和结构控制等研究都有着非常重要的意义。但是传统的模态参数识别要求同时测量输入和输出信号,这给大型工程结构的振动测试带来不少困难,如难以施加有足够能量的激励或激励昂贵、测试过程中影响结构的正常使用等。为此,研究者们提出了仅测量结构在正常使用时的环境激励下的响应信号的模态参数识别思路,称之为基于环境激励的模态参数识别或工作模态分析(OMA)。该类方法不仅无需特意施加人工激励和测试过程中不影响结构使用,并且识别出的模态参数反映了结构的真实边界条件和工作时的动态特性,因而得到广泛关注和研究。
基于环境激励的方法主要分为频域类方法和时域类方法。频域类方法主要有峰值拾取法、频率分解法等。时域类方法主要有:1)Ibrahim S.R.等提出的基于随机减量技术的从白噪声激励下结构随机响应中提取自由响应进而识别模态参数的ITD法;2)美国Sandia实验室James G.H.等提出的自然激励技术,他们认为白噪声激励下测量通道间的互相关函数和脉冲响应函数具有相同数学表达式,从而以其代替脉冲响应,再结合传统的基于脉冲响应的识别方法完成环境激励下的模态参数识别;3)随机子空间方法,该方法的主要贡献者如Akaike H.首先解决了状态空间模型的随机实现问题,Overschee P.V.等于1993年提出了直接基于数据的随机子空间方法,1999年Peeters B.等提出基于参考点的随机子空间方法。在这些方法中,随机子空间方法因无需迭代、计算量小,识别结果精确可靠而得到广泛关注。
在协方差驱动的参考点随机子空间方法中,通过将识别方法中全部测试通道间的相关函数计算减少为全部通道仅和参考通道间的相关计算,显著减少了该类方法的计算量。该方法在减少运算量的同时,是否会对模态参数识别精度带来影响,则有待研究。该文将在阐述该方法的识别理论的基础上,以一个数值算例探讨参考点随机子空间方法的识别效率,包括运算时间及结果的准确性,并对参考通道的选择提出参考意见。
1 协方差驱动的参考点随机子空间识别
1.1随机状态方程
一个连续弹性体结构可通过有限元方法离散为n个自由度的有限维结构,在动力荷载下的振动微分方程为:

式中:M、C2、K∈Rn×n分别为质量矩阵、阻尼矩阵和刚度矩阵;F(t)、U(t)∈Rn×1分别为激励力向量和位移响应向量;B2∈Rn×m为确定输入位置的选择矩阵;u(t)∈Rm×1为激励力向量。
对式(1)进行状态方程变换,即令状态向量x(t)∈R2n×1、系统矩阵Ac∈R2n×2n和输入矩阵Bc∈R2n×1分别为:


则式(1)可化为:

如果振动测量通道数为l个,测量物理量可以为加速度、速度或位移,即+CdU(t),其中Ca、Cv、Cd∈Rl×2n分别为对加速度、速度、位移的选择矩阵,考虑状态向量和响应间的关系,即可得到输出方程为:

式中:C=[Cd-CaM-1K Cv-CaM-1C2];D= CaM-1B2。
式(3)和式(4)便组成联系系统的确定性状态方程组。考虑离散采样和不可避免地存在过程噪声wk和测量噪声vk,该方程组可化成如下离散随机状态方程组:

式中:A为离散系统矩阵,A=exp(AcΔt);xk为离散时间状态向量,xk=x(kΔt);Δt为采样时间间隔;B为离散输入矩阵,;向量uk∈Rm×1和yk∈Rl×1分别为系统在k时刻的m个输入、l个输出测量值;C∈Rl×2n为输出矩阵;D∈Rl×m为直接作用矩阵。
1.2模态参数识别
在基于环境激励的模态参数识别中,激励未测量,假定结构受到零均值平稳白噪声激励,则离散随机状态方程组化为:


式中:δpq为kronecker记号。
振动测试中,测量物理量通常为加速度信号,参考点随机子空间方法的识别程序是首先构造全部l个测量通道加速度与m′个参考点通道间的相关函数的Toeplitz矩阵(非参考点协方差随机子空间方法则为全部通道间的相关函数矩阵):

式中:


由随机状态方程的性质可将Toeplitz矩阵表示为扩展观测矩阵O和逆向随机控制矩阵Γ的积,得到扩展观测矩阵表达式为:

则离散系统矩阵A可由扩展观测矩阵的移位结构关系得到:

C矩阵可直接取扩展观测矩阵O的上2n行得到。模态频率、阻尼及振型fk、ξk、φk可通过对离散系统矩阵A进行特征值分解A=ΨλΨT后由下式得到:

值得注意的是:在式(10)中,理论上系统真实阶次可由不为零的奇异值数量决定,但在实际应用中,奇异值普遍不为零,甚至它们的值之间也不会出现显著差异。这时根据虚拟模态(计算模态)将不会稳定出现的特点,可假定系统阶次在一定范围内变化,在各阶次中稳定出现的总次数来判断其是否是真实的物理模态,即稳定图方法。
2 数值算例
应用MIDAS/Civil软件建立一平面等截面简支梁,计算跨径32 m,断面为GB-YB工字形,型号为I100×68×4.5/7.6,材料为Q235钢材,弹性模量206 GPa,有限元离散划分为16个平面梁单元,单元长度2.0 m(如图1所示)。在桥梁半跨内的第2~9号节点竖向同时施加有限带宽白噪声动荷载模拟环境激励。根据响应结果,对照非参考点随机子空间方法研究参考点识别方法的识别精度,同时探讨参考点的选择方法。

图1 简支梁数值模型
2.1生成白噪声激励信号
采用的目标时域白噪声激励力信号的峰值为1 k N,采样频率fs为50 Hz,持续时间T为180 s。该信号采用MATLAB程序首先由白噪声的已知功率谱密度函数推求频谱函数,再叠加随机相位谱后经傅里叶逆变换生成。有限带宽白噪声功率谱密度值指定在0.01~100 Hz区段为1.0,原始采样频率f∗s为400 Hz,其他频率区间为零,生成信号的功率谱密度如图2所示。将该信号经1/8倍重采样和峰值调整后便得到目标信号(如图3所示)。连续执行8次得到所需的8个节点动荷载历程。
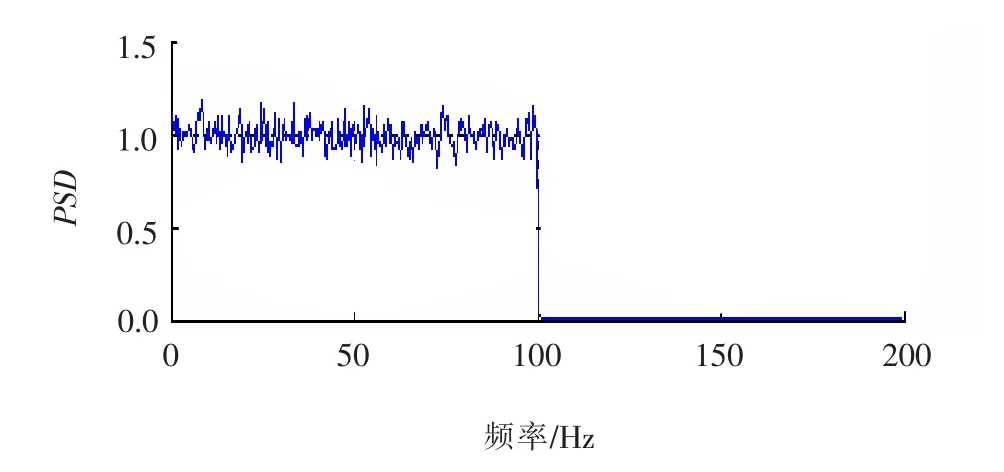
图2 生成信号的功率谱密度

图3 节点动荷载时程
2.2模态参数识别
取各阶振型阻尼比均为3%,应用MIDAS程序中振型叠加法进行时程分析,得到第2~16号节点180 s内的加速度响应历程。如果将所有通道的响应都作为参考通道,即应用传统的协方差驱动随机子空间方法进行模态参数识别,得到10 Hz内的结构稳定图和前5阶频率分别如图4、表1所示。图4中的稳定判别准则取频率分辨Δf=2%,阻尼分辨率Δξ=10%,属于相同阶模态的模态保证准则最小值为0.95,即取ΔMAC=5%,数据Toeplitz矩阵块行为30,即计算相关矩阵的最大时延为59Δt,状态空间模型阶次取80~160,判定为物理模态的稳定次数为≥20,计算时间为19.47 s(计算机CPU为Intel Core i3-2350M,主频2.3 GHz,内存4 G。图4中也显示出了全部通道的平均功率谱密度函数图形(纵坐标已和模型阶次变化范围匹配),可以清晰地得出系统物理模态位置区域,与随机子空间识别结果一致。

图4 非参考点随机子空间识别的稳定图
选取节点3、7~11、15共7个节点为参考点进行随机子空间识别的稳定图如图5所示,计算时间为11.32 s,节约约40%的计算时间。识别的频率、阻尼结果等如表1所示。由表1可见:参考点方法与非参考点方法相比,频率及振型识别结果差别甚微,阻尼有一定差别,该算例中部分振型(如第1及第5阶)阻尼比更趋于真值(3%)。
3 结论
基于环境激励的模态参数识别方法是大型工程结构健康监测、振动控制等研究与应用的发展方向之一。近年提出的基于参考点的随机子空间模态参数识别理论进一步提高了随机子空间方法的计算效率,其中协方差驱动的参考点随机子空间方法步骤简练,在选取可观测性好的自由度通道作为参考点时其识别结果准确可靠,值得推广。

图5 参考点随机子空间识别的稳定图

表1 参考点随机子空间方法识别结果与非参考点方法对比
参考文献:
[1] Peters B,Roeck D G.Stochastic system identification for operational modal analysis:a review[J].Journal of Dynamics,Measurement,and Control,ASME,2001,123 (4).
[2] 续秀忠,华宏星,陈兆能.基于环境激励的模态参数识别综述[J].振动与冲击,2002,21(3).
[3] 郑栋梁,李中付.环境激励下线性结构模态参数识别方法的最新进展[J].测试技术学报,2002(16).
[4] Brinker R,Zhang L,Anderden P.Modal identification from ambient responses using frequency domain decomposition[A].Proceedings of 18th IMAC[C].2000.
[5] Ibrahim S R.Random decrement technique for modal identification of structure[J].Journal of Spacecraft and Rockets,1977,14(11).
[6] Ibrahim S R,Mikulcik E C.A method for the direct identification of vibration parameters from the free response [J].The Shock and Vibration Bulletin,1977,47(4).
[7] James G H,Garne T G.Thenatural excitation technique(NEx T)for modal parameter extraction from ambient operating structure[J].The International Journal of Analytical and Experimental Analysis,1995,10(4).
[8] Akaike H.Stochastic theory of minimal realization[J]. IEEE Transactions on Automatic Control,1974,19.
[9] Overschee P V,Moor B D.Subspace algorithm for the stochastic identification problem[J].Automatic,1993,29(3).
[10] Peeter B,Roeck G D.Reference-based stochastic subspace identification for output-only modal analysis [J].Mechanical System and Signal Processing,1999,3(6).
[11] 常军.随机子空间方法在桥梁模态参数识别中的应用研究[D].上海:同济大学,2006.
[12] 张小宁.基于随机子空间方法的结构模态参数自动识别[D].哈尔滨:哈尔滨工业大学,2012.
[13] 常军,孙利民,张启伟.基于两阶段稳定图的随机子空间识别结构模态参数[J].地震工程与工程振动,2008,28(3).
[14] 姚志远,汪凤泉,刘艳.工程结构模态的连续型随机子空间分解识别方法[J].东南大学学报:自然科学版,2004,34(3).
中图分类号:U441
文献标志码:A
文章编号:1671-2668(2016)03-0198-04
收稿日期:2016-03-07
猜你喜欢
湖南教育·A版(2019年4期)2019-05-10
小学生学习指导(低年级)(2019年4期)2019-04-22
商周刊(2018年13期)2018-07-11
江西建材(2018年4期)2018-04-10
中国公路(2017年11期)2017-07-31
中国公路(2017年10期)2017-07-21
中国公路(2017年12期)2017-02-06
山东工业技术(2016年15期)2016-12-01
专用汽车(2016年8期)2016-03-01
中国工程咨询(2016年9期)2016-02-13