
基于3D打印技术的四旋翼飞行器设计
2016-06-08 08:50童明浩
湖北工业大学学报 2016年2期
童明浩, 王 君, 郑 晓, 梁 冰, 彭 俊
(湖北工业大学, 湖北 武汉 430068)
基于3D打印技术的四旋翼飞行器设计
童明浩, 王君, 郑晓, 梁冰, 彭俊
(湖北工业大学, 湖北 武汉 430068)
[摘要]分析基于3D的快速成型打印技术设计的四旋翼飞行器飞行原理,对其结构进行改进,对3D打印关键零件做出力学仿真。结果表明,通过3D打印技术制造出飞行器主体可轻松实现私人订制,设计的飞行器实物与传统的飞行器相比具有机动性强、体积小、动作灵敏等特点。
[关键词]四旋翼飞行器; 3D打印; 仿真分析; 快速成型
小型无人飞行器分为旋翼和固定翼两种,旋翼飞行器主要包括直升机飞行机器人和四旋翼飞行机器人两个分支[1],本文中的飞行机器人是指四旋翼飞行机器人。四旋翼飞行机器为了获取更大升力和更高的平稳性,飞行器的机架四个方向上对称安装了四个相互独立的螺旋桨[2-9]。与传统加工方式相比较,3D打印是一种与传统的材料加工截然相反的加工方式。它基于打印件的三维模型数据,通过逐层累加打印材料的方式制造产品[9-11]。基于3D打印的飞行机器人打造了符合现代化设计理念、满足现代化生活生产需要的飞行器,其专业性和实用性得到了广泛的认可[11-13]。
1四旋翼飞行器理论建模
1.1四旋翼飞行器的组成
四旋翼飞行器相对于传统的飞行器具有结构简单、控制方便灵活、设计巧妙、能够在各种环境下飞行等优点,它由机架、螺旋桨、姿态控制模块、电源以及接收装置组成(图1)。

图 1 四旋翼飞行器结构图
飞行器相关部分的作用。
1)机架:飞行器的机架呈十字型,主要用于安装控制电路板、无刷电机、电子调速器和电源。在设计机架时应尽量多用肋、筋等结构,这样不仅能够增强机架的强度,而且可以减轻整个机架的重量。
2)螺旋桨:两对螺旋桨分别安装在十字型机架的4个顶点,相对的2个螺旋桨朝同一个方向旋转,相邻的螺旋朝相反的方向旋转,螺旋桨的安装角度固定不可改变,通过改变4个螺旋桨的旋转速度控制飞行器的不同飞行姿态,为飞行器提供动力。
3)控制电路板:控制电路板是飞行器的核心部分,其好坏直接影响飞行器的整体飞行性能。主要由微处理器、惯性检测单元以及数据通信模块组成,以实现姿态的检测、控制以及与遥控器和电子调速器之间的数据通信功能。
4)电子调速器:将控制电路板发出的控制信号转变为电流信号,从而控制电机的转速。
5)接收机:接收来自遥控器的无线信号,并将其反馈给飞控板,从而实现相关的控制操作。
1.2四旋翼飞行器的原理分析
四旋翼飞行器根据其结构分为“X”型和十字型两种。十字型的机身支架与姿态改变方向的方向相同,相对于“X”型控制更加方便,本文研究对象为十字型飞行器(图2)。
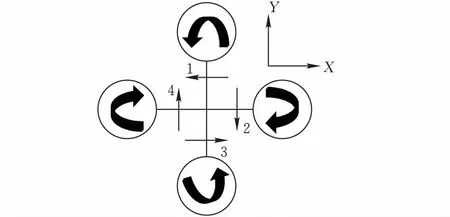
图 2 四旋翼飞行器十字型飞行方式
在四旋翼飞行器的十字机架顶端,每个螺旋桨下面安装一个独立电机(图2),电机1、2、3、4呈“十字型”安装在机架上。在飞行器飞行时,高速旋转的螺旋桨会产生扭矩,扭矩会使飞行器机身产生自旋,这种自旋运动如果不消除,将会干扰飞行器正常工作。为消除这种反扭矩,得使飞行器的4个螺旋桨对称分布,设定相邻2个螺旋桨的旋转方向相反,图2所示左右两个螺旋桨2、4的旋转方向为顺时针,产生顺时针方向的扭矩;上下两个螺旋桨1、3的旋转方向为逆时针,产生逆时针方向的扭矩,因此螺旋桨所产生的空气动力扭矩效应被抵消。
飞行器的飞行姿态是通过四个电机的旋转速度来控制螺旋桨的速度来实现的,飞行器的姿态主要包括高度、俯仰角、滚转角、偏航角几方面的控制。图3中箭头线粗细代表转速的快慢。

图 3 四旋翼飞行器飞行姿态控制
1.3质心运动模型
如图4所示,建立惯性坐标系E(OXYZ)和机体坐标系B(OXYZ),基于三个欧拉角(滚转角φ、俯仰角θ、偏航角ψ),可以得到机体坐标系B相对于惯性坐标系E的变换矩阵
R=RxRyRz=

(1)

图 4 四旋翼飞行器坐标系
取E(OXYZ)的一组标准正交基(b1,b2,b3)T,B(OXYZ)的一组标准正交基(i,j,k)T,则两个坐标系间向量变换可表示为:
(2)
重力G,沿OZ负方向;升力Fi(i=1,2,3,4),沿oz正方向。Mi(i=1,2,3,4)垂直于叶片的旋翼平面,与旋转矢量相反。
由牛顿第二定律对飞行器进行动力学分析,有:
(3)
(4)
其中:F为作用在四旋翼飞行器上的外力和,v为飞行速度,ωi为机翼转速。
由变换矩阵R知
(5)
将式(5)带入到式(4)中得
(6)
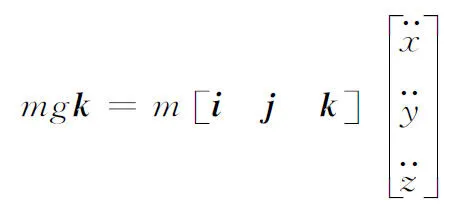
由矩阵对应元素相等,得质心运动方程:
(7)
23D打印技术与飞行器硬件设计
2.13D打印飞行器的优势
以前,对于飞行器的机架、机臂等一些塑料件的制造一般采用传统的制造技术。传统制造技术机械设备占用的空间比较大,工作环境恶劣,对加工出来的产品还需要再加工,比较适合于批量生产、结构简单且形状尺寸要求不严格的产品。而3D打印成型技术设备体积小,不需要单独的车间来放置打印机,而且结构简单,材料丰富,能制造出一些结构比较复杂的产品,比较适合于私人订制类型创新产品的制造。
随着对四旋翼飞行器的不断摸索创新,人们对其结构提出了更高的标准,相比较于传统的制造技术而言,3D打印技术不需要考虑工艺、加工等各方面的问题,而且所需要的材料是绿色可降解的材料,打印出来的物件可以根据具体使用要求设置不同填充形状与填充量使打印件在质量最轻的情况下获得最大的强度。选择使用3D打印成型技术可以做出更好的飞行器。本文使用的3D打印机如图5所示。
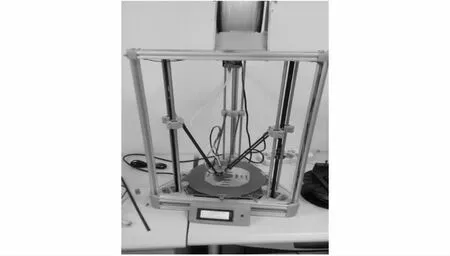
图 5 3D打印机实物
2.2四旋翼飞行器三维建模及相关组件静应力分析
整个飞行器的立体机架结构是其能够正常飞行的基础,各方面的尺寸都是相互制约的。整个机架都是由3D打印技术制造。考虑到所使用的打印材料是PLA,机架的上机架(图6a)和下机架(图6b)设计为5 mm厚,外形尺寸为140 mm,上机架板上适当去除一些材料,一方面为了减轻飞行器硬件的重量,另一方面也便于飞控等电子元器件的固定。
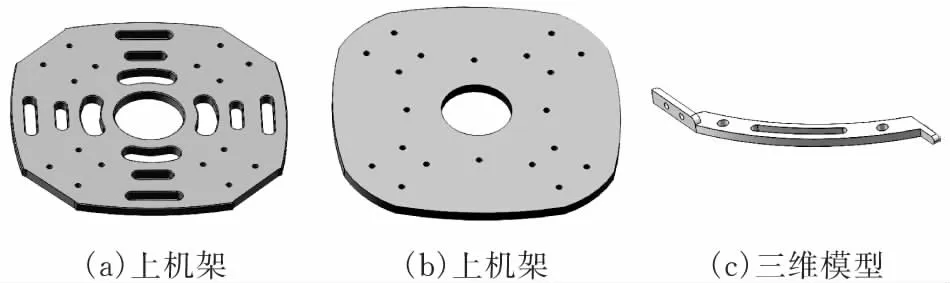
图 6 3D打印零件三维图
整个飞行器要着陆而且飞行器起飞时螺旋桨下面要有足够多的空间使螺旋桨有足够的升力来带动飞行器起飞,特此设计了上下高度为70mm的飞行器云脚架,其三维模型如图6c所示。
为了增强机架结构的刚性以及整个机架在飞行中的稳定性,且考虑到机臂是整个飞行器受力的核心模块,机臂的强度直接影响着整个飞行过程能否顺利进行,因此,设计上下机架板之间需要固定的机臂根部的厚度为20 mm,机臂中间厚度为8 mm,宽22 mm,每个机臂的长度为160 mm。而且机臂是通过3D打印出来的,考虑到打印过程中支撑物不好打印等问题,在此特意将机臂下面部分做成一个平面,三维图如图7所示。

图 7 机臂三维图
由SolidWorks simulation功能对主要受力部件机臂进行静应力分析,对安装无刷电机部分施加700 g向上的力。应力、应变分析的结果如图8所示。

(a)应力图解
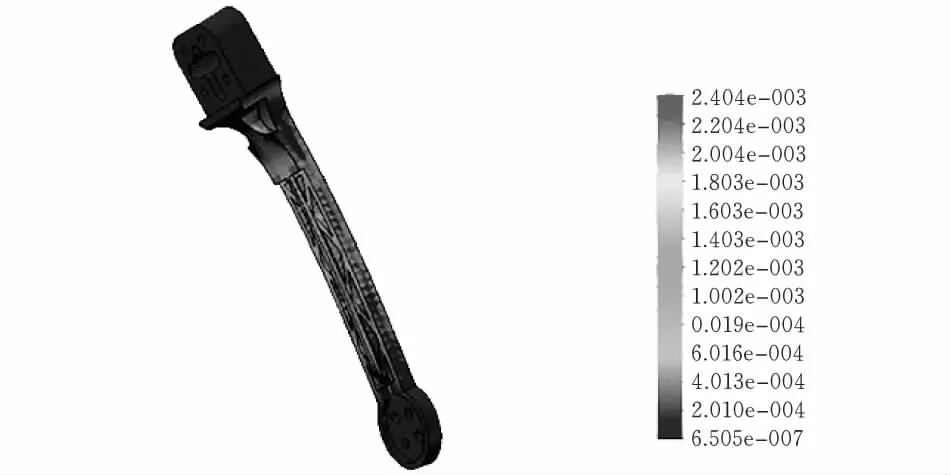
(b)应变图解图 8 机臂静应力分析结果
机臂静应力分析结果表示,电机正常运行时,机臂足以承受其提供的升力。对比由3D打印技术打印的立体模型和所绘制的三维图可以看出,如今3D打印技术已经相当成熟,无论在外形结构设计方面还是在总体尺寸和重量上都可以满足实际工作需求,同时在切片的过程中通过修改填充密度和每次材料沉积的厚度可以完成不同的精度要求。
综合各个零件的设计,最终整个机架装配的三维图如图9所示。

图 9 四旋翼飞行器三维图
本飞行器所有原器件如下:3D打印机架、1045螺旋桨、新西达A2212 KV1000无刷电机、好盈30A无刷电子调速器、分电板、格氏锂电池、QQ飞控、天地飞WFR06S 2.4G 6通道接收机和天地飞WFT06X-A 2.4GHz 6通道遥控器,图10即为四旋翼飞行器的连接线路图。
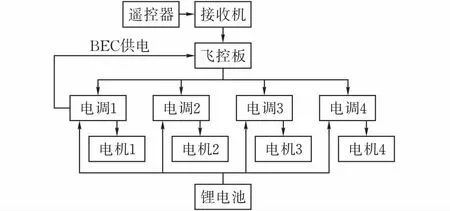
图10 四旋翼飞行器连接图
飞行器的整个组装分为以下几个步骤:1)组装3D打印出来的机架;2)将香蕉头焊接到无刷电机上便于与电调的连接,并将电机分别固定在机架上;3)将电调的四个正负极分别焊接在分电板上,同时将T插的公头焊接在分电板上,以便于电源连接;4)将电机与电调之间的线和接收机与QQ飞控之间的线连接起来。
在整个安装的过程中不仅要注意四轴和电子元器件之间配置的平衡,而且螺旋桨要在所有元器件安装并调试完成之后才能安装,否则很容易造成不必要的人身和硬件的伤害。最终飞行器实物图如图11所示。
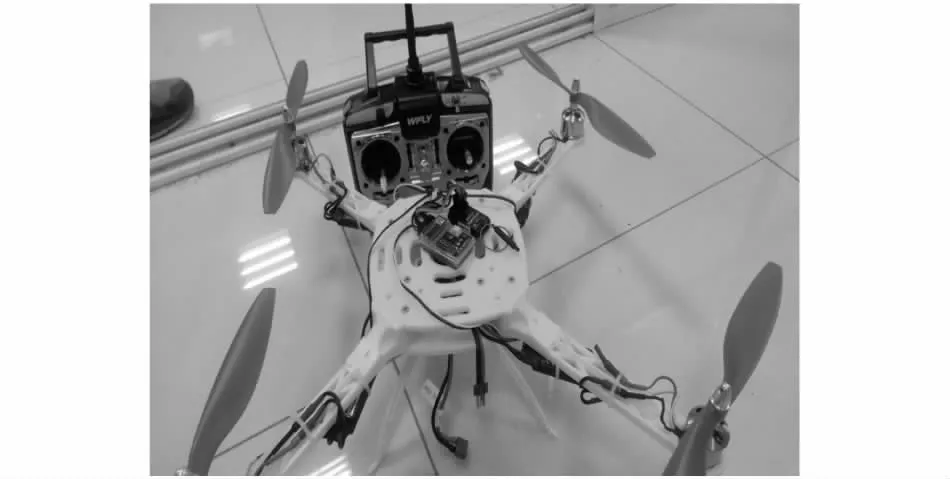
图11 四旋翼飞行器实物图
3结束语
本文对飞行器的结构组成及其相关组成部分的功能做了简要阐述,并结合相关简图分析了飞行器各种飞行姿态飞行原理,建立飞行器的相关模块的原理模型与质心运动模型。通过分析比较选择3D打印制造技术制作飞行器的主体部分,并在理论建模的基础上对机架进行总体设计,得出各个部分的三维图及相关参数。针对上述机架结合相关器件进行某些器件的测试,并对组装起来的整机进行试飞调试, 3D打印的飞行器飞行状况良好。
[参考文献]
[1]陈海滨,殳国华.四旋翼飞行器的设计[J].实验室研究与探索,2013,32(3):41-44.
[2]Bresciani T. Modelling, identification and control of a quadrotor helicopter [M]. Lund University: Department of Automatic Control, 2008.
[3]杨明志,王敏.四旋翼微型飞行器控制系统设计[J].计算机测量与控制,2008,16(4):485-487.
[4]刘峰,吕强,王国胜,等.四轴飞行器姿态控制系统设计[J].计算机测量与控制,2011,19(3):583-585.
[5]李钊.飞行机器人姿态测量与控制系统的设计与实现[D].北京:华北电力大学,2013.
[6]谭广超.四旋翼飞行器姿态控制系统的设计与实现[D].大连:大连理工大学,2013.
[7]杨帆.微型四旋翼飞行器的建模与控制系统研究[D].太原:太原理工大学,2014.
[8]邹荣.四旋翼飞行器姿态控制系统的研究与设计[D].长沙:中南大学,2014.
[9]Amir M Y, Abbass V. Modeling of Quadrotor Helicopter Dynamics[J]. International Conference on Smart Manufacturing Application, 2008:100-105.
[10] Conner B P, Manogharan G P, Martof A N, et al. Making sense of 3-D printing: Creating a map of additive manufacturing products and services[J].Additive manufacturing, 2014, 1(4):64-76.
[11] 李小丽,马剑雄,李萍,等.3D打印技术及应用趋势[J].自动化仪表,2014, 35(1):1-5.
[12] 张楠,李飞.3D打印技术的发展与应用对未来产品设计的影响[J].机械设计,2013, 30(07):97-99.
[13] 郭振华,王清君,郭应焕.3D打印技术与社会制造[J].宝鸡文理学院学报(自然科学版),2013, 33(4):64-70.
[责任编校: 张众]
The Design of a Quadrotor Helicopter Based on 3D Printing Technology
TONG Minghao, WANG Jun, ZHENG Xiao, LIANG Bing, PENG Jun
(HubeiUniversityofTechnology,Wuhan430064,China)
Abstract:This paper designed a quadrotor helicopter based on 3D printing technology. According to the features of quadrotor helicopter, we made a detailed analysis of the quadrotor’s flight principle, the innovation and improvement of the structure in order to make a mechanical simulation analysis for the key parts of 3D printing. The results show that it is easy to manufacture the body of the aircraft to realize the prototyping vehicle with personal design through 3D printing technology which made rapid. Compared with the conventional aircraft, the final quadrotor has stronger maneuverability, smaller size and smarter performance, which also has broad application prospects.
Keywords:quadrotor; 3D printing; simulation analysis; rapid prototyping
[收稿日期]2016-01-08
[基金项目]国家自然科学基金项目(51405140);湖北省自然科学基金重点项目(2015CFA112);湖北省教育厅优秀中青年科技创新团队项目(T201505)
[作者简介]童明浩(1991-), 男, 湖北,湖北工业大学硕士研究生,研究方向为并联机构,并联机器人及操作器
[通讯作者]王君(1977-),男,湖北,博士,湖北工业大学教授,研究方向为机器人学,先进制造技术与装备,新能源技术
[文章编号]1003-4684(2016)02-0009-03
[中图分类号]TH122
[文献标识码]:A
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
冶金设备(2020年3期)2020-12-13
航空发动机(2020年3期)2020-07-24
机电设备(2020年3期)2020-06-28
家庭影院技术(2019年12期)2020-01-19
电子制作(2019年9期)2019-05-30
中学科技(2017年10期)2017-11-04
北京航空航天大学学报(2016年8期)2016-11-16
重型机械(2016年1期)2016-03-01
