
基于电液比例控制的液压支架搬运技术研究
2016-06-01 11:35周国力杨国宏
电气传动自动化 2016年4期
周国力,杨国宏
(华亭煤业集团,甘肃平凉744100)
基于电液比例控制的液压支架搬运技术研究
周国力,杨国宏
(华亭煤业集团,甘肃平凉744100)
根据煤矿井下工作面液压支架安装搬运的技术要求,提出了一种采用电液比例技术驱动控制的液压支架搬运系统。该系统采用电液控制技术,采用电液比例变量泵控马达闭式容积调速回路系统作为液压支架搬运系统的动力驱动方案。运用Matlab软件对系统进行了仿真。为了进一步改善系统的稳定性和快速性,提出了基于遗传算法的PID校正控制方案。仿真结果表明,校正后的系统具有较好的稳定性和控制效果。
液压支架;容积调速;电液比例控制系统;Simulink模型
1 引言
作为煤矿井下综采机械化工作面的支护设备,液压支架在煤矿开采中具有重要价值和作用。近年来,随着科技的发展和进步,液压支架的结构和重量不断趋于复杂化和大型化,其快速运输和转移技术成为制约煤矿综采效率和水平的重要因素。因此,开发高效率、大容量的液压支架搬运技术成为当前煤矿高效生产的研究热点[1]。
本文根据煤矿开采工作面液压支架的安装和快速撤除的技术要求[2],开发了一种基于电液比例驱动控制的支架搬运新方案。该方案采用了比例控制与液压驱动技术,并利用了电液比例变量泵控马达闭式容积调速回路。为保证搬运系统的两轮能保持同步且独立运动,该方案采用了双泵与双马达组成的独立的左右驱动回路,检测两侧的双马达转速,可进行速度的同步与独立控制。
作为液压支架搬运系统的动力驱动方案,由于液压驱动的输出力和力矩较大,容易实现精确的自动化控制,故该系统特别适合于大惯量的液压支架搬运控制。
本文运用Matlab仿真软件对系统进行了仿真,验证了系统的稳定性。同时,为改善系统性能并使其获得较宽的更加良好的频率调节范围,本文采用了基于遗传算法的PID校正控制,以使校正后的系统具有最佳控制效果和稳定性能。
2基于电液比例控制的液压支架搬运驱动系统
2.1系统控制方案
如图1所示为系统控制方案。为适应液压支架搬运驱动的控制要求。本文采用电液比例变量泵控液压马达容积闭式回路,在该调速回路中,液压马达的调速范围较大,可获得较低的工作速度,并能以恒扭矩方式进行调速。同时,为保证搬运系统的稳定性,确保两侧独立同步运行,本文在系统设计中,两侧分别采用一套变量泵与液压马达液压驱动系统,并使之相互独立、对称,而且互不干扰。

图1系统控制方案
2.2电液比例控制系统
典型的基于电液比例控制的液压支架搬运系统的结构如图2所示,系统主要由双向液压马达、变量泵、测速与传感装置、减速与传动机构等构成。变量泵为系统提供液压能源供应并进行变排量调节。当液压泵的转速一定时,按照一定的规律可以调节其排量大小,即可以调节输出到液压马达的流量大小和方向。液压马达的速度可经由其上的速度传感器进行检测。减速与传动机构可实现系统低速搬运动作的传动与执行。另外,系统配有补油泵,它用作系统散热、冷却和泄漏的补充等,并可为变量机构提供恒定的控制油压。
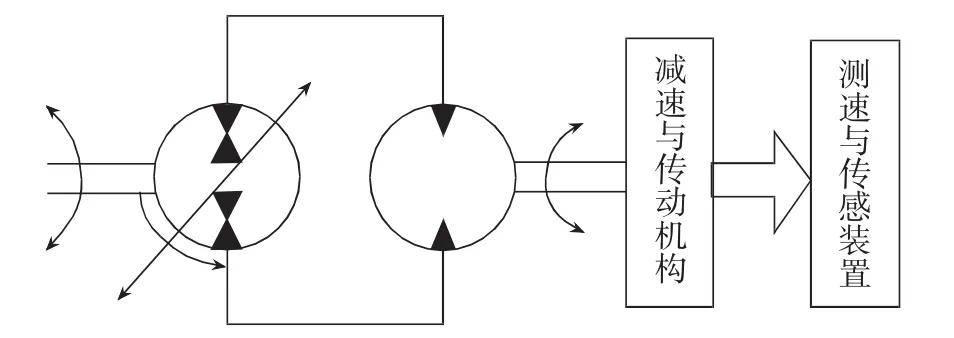
图2单侧典型的电液驱动控制系统
基于电液比例控制的液压支架搬运系统,其两侧分别带有一套独立的驱动控制系统,采用两个独立的液压马达进行驱动控制。为了在实际运行过程中保证两侧马达的同步运转,使其转速相等,本系统的电比例驱动回路采用两侧双泵独立供油,实现了两侧马达的独立驱动控制。
2.3定量马达的转速检测与反馈控制
图3为变量泵控制液压马达的闭环控制原理图。转速传感器检测并获得驱动装置的速度信号,与给定的速度信号进行比较运算,通过控制器进行运算和处理后,得到控制信号,该信号控制电比例液压阀和液压泵的变量调节机构,使得系统的速度偏差不断减小,并最终使得两侧液压马达达到同步运动。该系统为两侧独立运行的速度控制闭环系统,其控制精度较多取决于转速传感器的精度和电液比例阀的频宽。

图3变量泵控制液压马达的闭环控制原理图
3基于Matlab/Simulink的仿真研究
由于系统两侧回路对称,本文仅对单侧变量泵控制定量马达的闭环控制系统建立仿真模型并进行仿真研究。
3.1基于PID控制的电液比例控制系统模型
系统基于Matlab/Simulink的仿真模型如图4所示。

图4基于Matlab/Simulink的仿真模型
模型主要由PID控制器模块、限幅模块、基于电液比例控制的变量泵模块、变量泵控液压马达模块及转速检测反馈模块等组成。
通过调整PID控制器的参数设置可以改变和优化系统的响应特性,并获得系统良好的动态特性。本文通过混合遗传算法优化PID参数,获得系统在给定目标函数下的最优性能。
3.2基于遗传优化算法PID控制的电液比例驱动控制系统模型
利用遗传算法优良的搜索能力获得控制器的最优解,并得到PID控制器参数的最优解,然后通过该解控制整个系统模型的输出。
如图5所示,建立基于遗传算法PID控制的Matlab/Simulink优化模型。模型的输入为单位阶跃信号,优化指标为ITAE指标,即为最小误差时间积分。

设定仿真时间为10s,PID控制器三参数全局优化范围设定为:


图5基于遗传算法PID控制的优化模型
通过遗传算法优化得到的PID的最优值为:

3.3系统特性的对比分析
为了研究优化前后系统的响应情况,通过优化前后阶跃响应曲线进行对比分析。
如图6所示,根据阶跃响应的对比仿真结果可知,基于遗传优化算法的PID控制器的电液驱动系统响应速度快,系统的上升时间为0.5s级别,而基于普通PID控制器的系统响应时间约为2s。同时,基于遗传优化算法的PID控制器的电液驱动系统的稳态时间和上升时间获得了极大的改善,系统的超调量很小,稳态精度很高,而普通PID控制器阶跃响应的超调量很大,约达到30%,系统的稳定性能较差。因此,通过基于遗传优化算法的PID控制器可以有效提高控制系统的响应特性和稳定性。
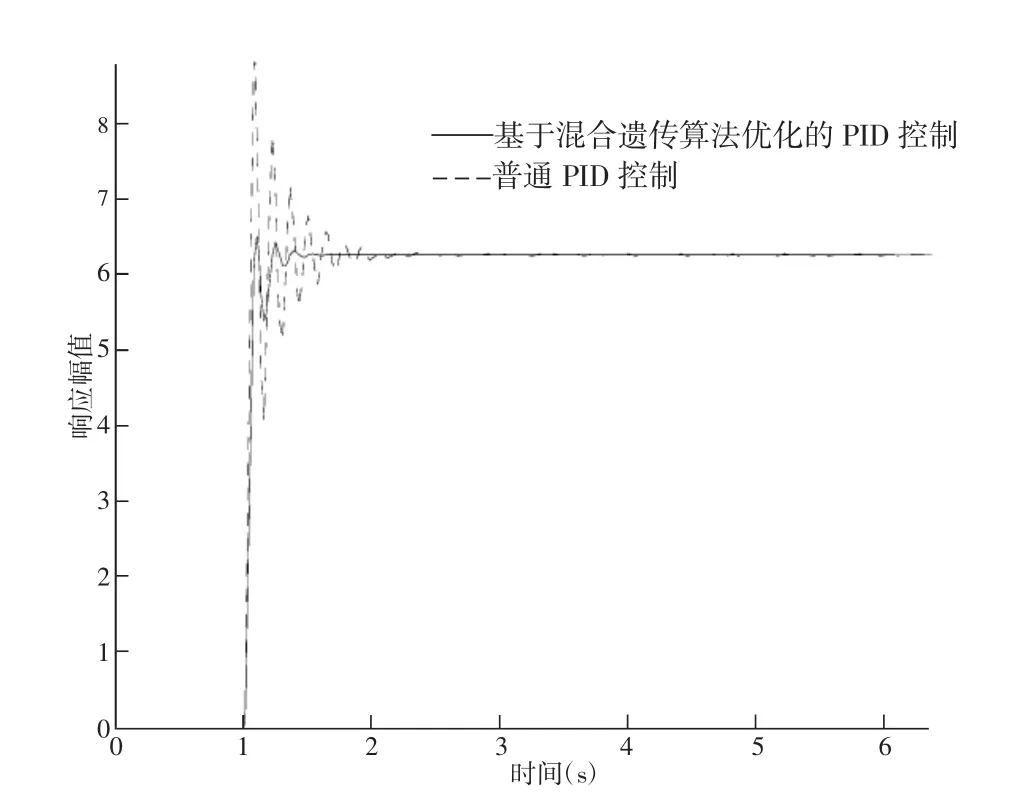
图6遗传优化算法PID控制与普通PID控制阶跃响应的对比仿真结果
当采用PID调节时,系统在起始的一段时间内,实际的输出转速与给定转速之间的偏差仍较大,波动较为剧烈。对于重型支架搬运系统而言,搬运的初始振动通常无法避免,稳态情况时能够满足同步且达到偏差控制性能指标即能说明PID控制方法有效。

图7同步控制的误差曲线
4结束语
本文提出了一种液压支架电液比例牵引传动与调速控制方案,分析研究了系统的回路组成和工作原理。通过建立系统的仿真模型,对系统的工作与调速特性进行了研究,主要研究了系统的快速性、稳定性、准确性等控制系统常见的控制特性。仿真研究结果表明,基于电液比例控制的液压支架搬运控制系统具有较快的响应速度、自然且良好的稳定性,可满足系统牵引控制的要求。本文的研究为该方案的工程应用奠定了良好基础,也为液压支架搬运控制技术的研究开辟了新方向。
[1]张全有.国内外液压支架搬运技术发展状况及其应用展望[J].煤矿技术,2002,(8).
[2]洪晓华,陈 军.矿井运输提升[M].徐州:中国矿业大学出版社,2005.(13).
[3]防焕英.我国煤矿辅助运输的现状与发展[J].煤矿机电,1998,(5).
[4]陈伟健,齐秀丽.矿山运输与提升[M].徐州:中国矿业大学出版社,2007.(2).
[5]杨韬仁.我国煤矿辅助运输的现状和无轨胶轮技术的应用[J].煤炭科学技术,2006,(3).
Research on hydraulic support handling technology based on electro-hydraulic proportional control system
ZHOU Guo-li,YANG Guo-hong
(Huating Coal Industry Group,Pingliang 744100,China)
According to the requirements of the working face of the coal mine hydraulic support installation and dismantle mechanization process,a novel kind of hydraulic support handling technology based on electro-hydraulic proportional control system is proposed.The hydraulic drive system with proportional control technology uses the closed volume control circuit system of the electro-hydraulic proportional variable displacement pump control motor as the driving scheme of the hydraulic support transportation vehicle system.The Matlab software is used for the system simulation.In order to improve the stability and fast performance of the system,a genetic algorithm based PID correction control is presented and the simulation results show that the system has good stability and better control performance after correction.
hydraulic support;volumetric speed control;electro-hydraulic proportional control system;Simulink model
TD434
A
周国力(1972-),男,甘肃华亭人,工程师,主要从事煤矿机电等方面的设计研究工作。
2016-06-15
1005—7277(2016)04—0025—04
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
重型机械(2020年2期)2020-07-24
凿岩机械气动工具(2017年3期)2017-11-22
小学生导刊(2017年15期)2017-05-17
凿岩机械气动工具(2016年2期)2016-11-11
棋艺(2016年4期)2016-09-20
中国塑料(2016年3期)2016-06-15
专用汽车(2016年4期)2016-03-01
