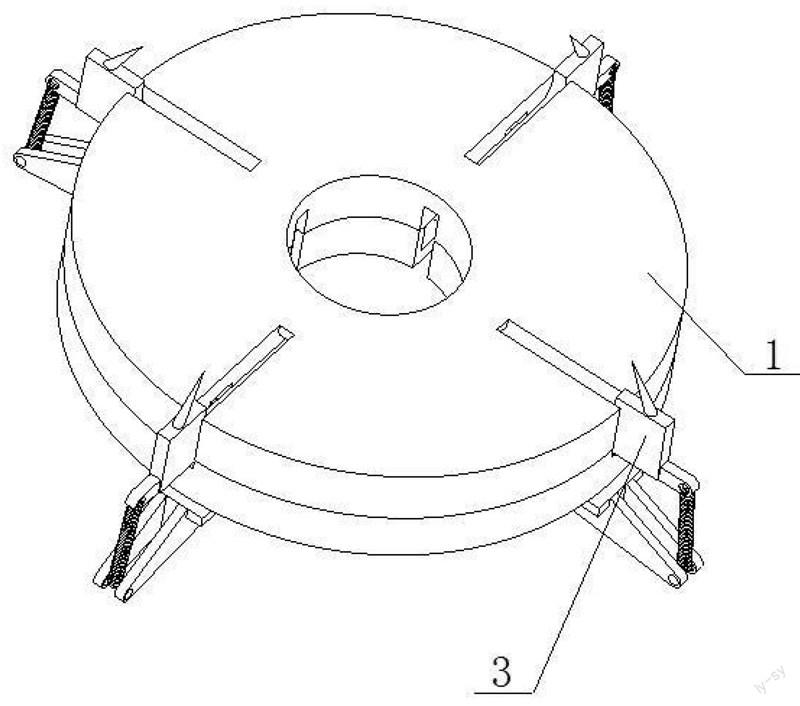
一种基于气动人工肌肉的力、角度可控钩爪
2016-05-30 09:38:13
科技创新导报 2016年1期
授权公告号:CN205203184U
授权公告日:2016.05.04
申请号:2015201316124
专利权人:南京邮电大学
地址:210023江苏省南京市亚东新城区文苑路9号
发明人:徐丰羽;胡金龙
Int. Cl.:B62D57/024(2006.01)I
摘 要:该实用新型涉及高空建筑物粗糙表面爬升机器人的抓取钩爪,尤其涉及一种基于气动人工肌肉的力,属于智能仿生机器人领域。基于气动人工肌肉的力、角度可控钩爪导向盘内设有气动弹簧组件;钩爪嵌置在导向盘,钩爪的上端设有悬架;气动弹簧组件置于钩爪与悬架之间;联接盘与导向盘相互盖合;通过气动弹簧组件的张合控制钩爪与悬架的运动。该实用新型提供的基于气动人工肌肉的力、角度可控钩爪能够实现角度抓取,抓取性能稳定;每个机构之间通入不同压力的气体,可以分别实现对钩爪的抓取力及抓取角度的控制。
猜你喜欢
法制博览(2022年29期)2022-10-21 08:12:44
天然气与石油(2022年4期)2022-09-21 07:05:54
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
四川冶金(2019年4期)2019-11-18 09:30:56
测控技术(2018年9期)2018-11-25 07:44:24
法制博览(2018年4期)2018-01-22 15:02:52
北京汽车(2016年6期)2016-10-13 17:07:50
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
凿岩机械气动工具(2014年3期)2014-03-01 04:00:07
汽车维护与修理(2014年10期)2014-02-28 12:15:00