机器助人
2016-05-30 15:34郭静远王晨焕应正浩黄易单洪天乐张笑语刘钰青
发明与创新·中学生 2016年1期
郭静远 王晨焕 应正浩 黄易单 洪天乐 张笑语 刘钰青
如今,社会正步入机器人时代,在浙江,“机器换人”的口号也越喊越响,连我们的家乡,一个小小的县城也有很多工厂、企业开始用机器人替换人工。
每逢节假日都会出现劳动力暂时短缺的现象,而机器人不用放假休息,效率很高,且不用付工资,只要用电“喂饱”它就可以了。于是,我们也想做一个能帮助人们搬运货物的机器人。
一、准备工作
1.制作材料
密度板、电线、光轴(有滑块)、步进电机、限位开关、指示灯、蜂鸣器、控制器、螺丝、螺母、自制电磁铁等。
2.使用工具
锉刀、老虎钳、榔头、螺丝刀、立式钻床、电烙铁、锯子等。
二、设计制作
机器人的框架以木材为主,由于三合板并不牢固,于是改用从废旧桌椅上拆下来的密度板,利用钉子将它们合理组合,并留下足够的发挥空间。
我们设计的机器人通过三个坐标系运作,所以三个坐标所在的木框必须相互垂直,一旦某个轴有偏差,该轴上电机移动的工作都将失去精准。
郭静远、应正浩和张笑语经过仔细测量后,用铅笔在木板上标出打孔点,并用立式钻床打孔。为防止打偏,先钻小孔,对准后快速旋转钻床右边的把手,使钻头快速下降并返回,尽量避免偏差。
考虑到如果就这样旋进螺丝,螺帽会凸出木板外,影响整体美观,所以用钥匙旋下小钻头,换上稍大一点的钻头打出沉孔。沉孔与打孔不同,只需把钻头对准小孔,接触后放松木板,钻头会自动调整以对准中心,沉孔沉到一定位置应立刻结束,避免打穿木板。
在指导老师的帮助下,我们终于做出了一个像模像样的机器人框架。接下来是电路的调试安装。
1.测试电机的线路连接
先将步进电机上的导线区分开,并用万能表的2个表棒分别接触8个彩色线头,通过观察万能表指针的转动,辨别电机内部的线路,为下一步的连接做准备。
要想机器人能完成搬运工作,还需给它安装一个能抓东西的执行装置,我们决定自制一个电磁铁。
虽然初中就已学过电磁铁,但自己制作还是第一次,得用极细的金属丝紧紧缠绕在卷轴上,还要保证它不断,非常麻烦。在大家的努力下,电磁铁终于完成了。
要让机器人动起来还需编程。初次接触PMC配置软件,我们对此一无所知,王晨焕同学抱着必胜的信念,在研究了厚厚的一沓资料后开始上手操作。几次修改和调试后,机器人终于能动起来了。
2.测试盒子的研究
最初我们想用白盒子内附一块铁皮进行测试,张笑语、童潇将金属夹拆开、锤平,并锯成小块铁皮,但粘上后效果不佳,且电磁铁吸引的位置有偏差。有同学提议用硬币尝试,又因盒子太重而失败。最后黄易单从家里带来一些金属盒,由刘钰青装饰后最终完成。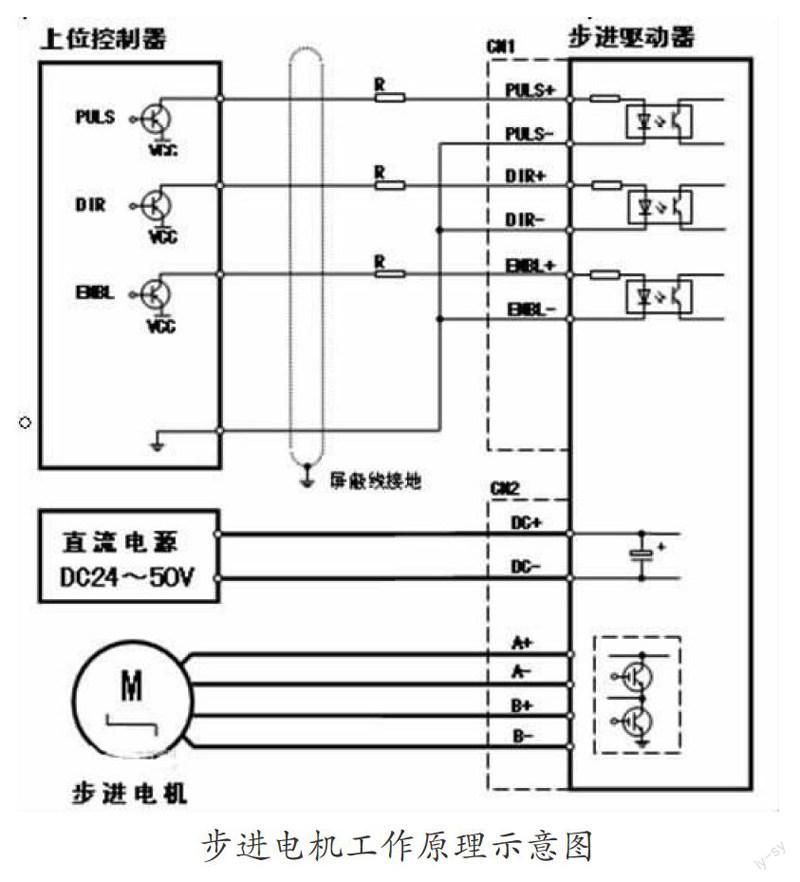
3.主要核心元件
①三轴联动PLC型运动制器PMC-20MT-3
PMC是可编程运动控制器,集成了PLC与运动控制器双重功能,而且编程方法简单。该控制器可控制三个电机运动,实现点位、连续、联动等功能,同时具有循环、跳转等功能,还能连接电脑软件,实现电脑模拟控制、软件分布调试、示教等功能,广泛应用于自动化控制行业。
使用前,需在电脑上安装PMC下载驱动程序。我们使用485数据线将PMC与电脑连接,打开设备管理器,找到端口后进入高级设置,更改次端口号,就可在已下载的程序上编程。机器人有了“灵魂”,就能完成指定的任务了。
②步進电机驱动器
步进电机驱动器是一种将电脉冲转化为角位移的执行装置。当步进驱动器接收到一个脉冲信号,就会驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可通过控制脉冲个数来控制角位移量,达到准确定位的目的。同时通过控制脉冲频率控制电机转动的速度和加速度,可达到调速和定位的目的。
步进电机驱动器采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使其步进转动。下图是步进电机工作原理示意图。
滚珠丝杠由螺杆、螺母等组成,它的功能是将旋转运动转化成直线运动,当滚珠丝杠作为主动体时,螺母随丝杆的转动角度按照对应规格的导程转化成直线运动,被动工件可以通过螺母座和螺母连接,从而实现对应的直线运动。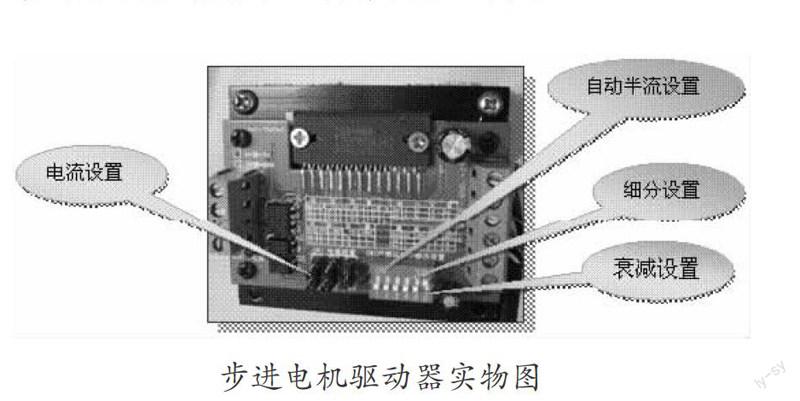
三轴联动PLC型运动制器PMC-20MT-3采用研宏PMC专业配置软件编程,界面简洁,方便操作,新手入门快,能根据我们设计的动作编写控制逻辑和各种参数,让机器人完美地动起来。
步进电机驱动器TB6560的设置比较可行,通过查看使用手册,我们在电流设置、自动半流设置、细分设置、衰减设置等方面进行了各种组合的操作试验,终于找到合适的数据,并拨码设置好,使步进电机能安全有效地运行。
三、工作原理
本机器人采用直角坐标来定位,通过x,y,z三维坐标的移动,使机械手能到达三维空间的任意位置,从而使物体被搬运到三维空间的任意位置。
为保证这一点,我们采用硬软件相结合,硬件以木框为基础搭载x,y,z轴所需要的光轴、丝杆、步进电机组成的运动机构,以及位置配套的控制器、驱动器和电源。软件采用PMC运动控制卡软件,通过编程、485下载线程序下载到控制器,由它发出指令控制运行,使其有能力执行人的命令。(指导老师:汪文峰 程国祥江玲玲)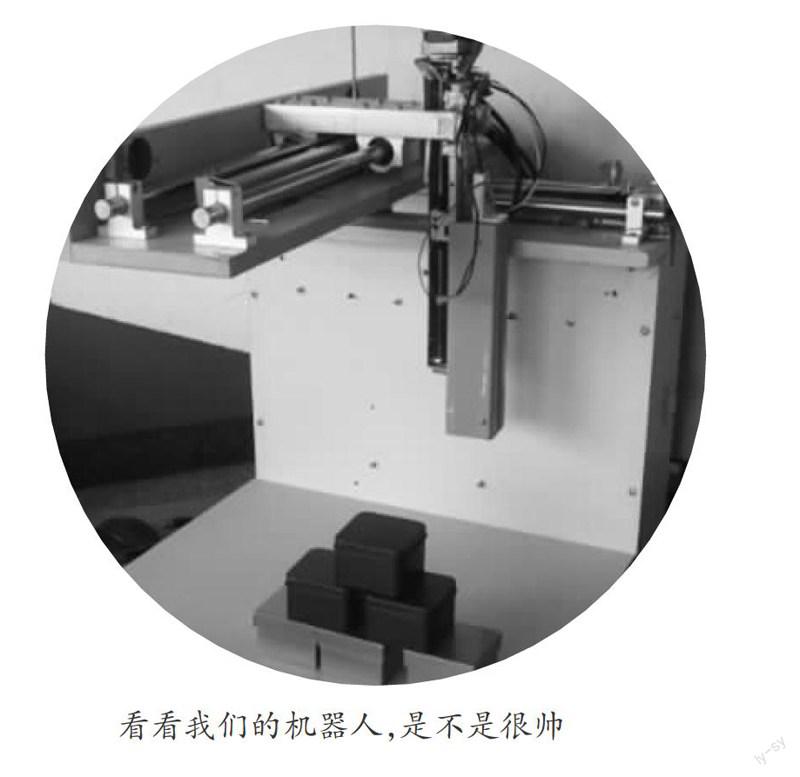
猜你喜欢
机械工业标准化与质量(2021年8期)2021-10-13
防爆电机(2021年2期)2021-06-09
减速顶与调速技术(2021年3期)2021-03-09
有色金属加工(2020年4期)2020-08-20
电脑爱好者(2020年6期)2020-05-26
思维与智慧·上半月(2020年4期)2020-04-13
思维与智慧(2020年7期)2020-04-09
福建质量管理(2018年20期)2018-11-14
光学精密工程(2016年5期)2016-11-07
上海电机学院学报(2015年3期)2015-02-28