
关于复杂交通场景中的车辆检测与跟踪
2016-05-30 08:23李杨
西江文艺 2016年10期
关键词:跟踪
李杨
【摘要】:城市交通问题是人们关注的热点,智能交通系统可有效缓解城市交通压力。而智能交通系统离不开车辆检测技术和车辆跟踪技术的支持,本文以复杂交通场景中上述两种技术研究对象,提出了一种可以有效辨别车辆性质,即临时车辆和确定车辆的跟踪与检测方法。
【关键词】:复杂交通场景;车辆检测;跟踪
城市交通压力随着时代进步越来越大,智能交通系统的出现可有效缓解城市交通压力。而视频图像检测器是智能交通系统中关键的组成部分,它通过捕捉车辆运行中的图像,使相关人员可全面掌握交通现状。本文以复杂交通场景中车辆检测技术和车辆跟踪技术为研究对象,提出了一种可有效辨别车辆性质,即临时车辆和确定车辆的跟踪与检测方法。
一、复杂交通场景中的车辆检测与跟踪
本文设计的车辆检测与跟踪监测系统分为三部分,一是锁定感兴趣区域,二是对重要区域内的车辆进行识别和检测,三是对车辆进行跟踪处理。感兴趣区域(ROI,region of interesting),简称ROI。锁定感兴趣区域即提取包含目标车辆的场景,这样才能开展下一步车辆检测和跟踪工作。在锁定感兴趣区域时笔者使用的是背景差法,最终得到很多ROI图像,每幅ROI图像代表一个“疑似车辆”。但需注意ROI图像之间可能存在重叠现象,主要有两类重叠现象:第一类,不同车辆之间重叠;第二类,一台车不同部分之间重叠。针对第二类重叠现象,需要进行一定的融合处理,目的是避免出现同一台车反复出现的现象。具体融合过程如下:
假定两个ROI图像重叠,第一个ROI图像对应的外接框面积可表示为,第二个ROI图像对应的外接框面积可表示为,两者之间重叠部分的面积可表示为,假定两个ROI图像的重叠率分别为和,那么可得出,。在开展融合操作时需遵照一定的原则,主要有两三个原则:
第一,若和的数值大小满足一定的条件,即,或者是,其中表示的是事先设定的阈值,在本系统中笔者以经验为依据选择阈值为0.7,若和可以满足上述条件,就可开展融合操作。
第二,如果和的数值大小满足一定的条件,即,或者是,其中表示的是事先设定的阈值,在本系统中笔者以经验为依据选择的阈值是0.1。此时,假定重叠部分中感兴趣区域的有效像素集合是A,而两个外接框中有效像素集合分别是B和C,检查集合A、B和C之间的关系,如果,其中是集合B的一部分,而是集合C的一部分。此时若子集和满足下述两个条件中任意一个,则原始图像就可以融合:(1)子集是空集,或者子集是空集;(2)子集中的元素个数要比事先设定的阈值少,或者子集中的元素个数要比事先设定的阈值少。如果子集和满足不能满足上述两个条件中的任意一个,那么原始图像就无法融合。
第三,如果,同时,那么原始图像无法开展融合操作。
融合操作结束后,需开展特征提取过程,特征提取的主要目的是找出ROI图像中的一些有用信息。笔者需要提取的特征主要有以下几种:质心点坐标、平均灰度、方向、面积和描述区域形状的坐标集。笔者将上述特征分为两类,第一类是主要特征,如、,第二类是次要特征,如、。特征提取操作结束之后,可得到表征ROI图像的两组特征向量,分别是主要特征向量以及次要特征向量。
上述操作都是为了后续匹配工作做准备,ROI图像代表行驶中的不同车辆,本系统中的匹配就是指根据ROI图像来找相似区域,进而确定和定位行驶中的某一辆车。具体匹配过程如下:
匹配过程中涉及两个链表,分别是车辆链表和当前帧图像临时链表,和匹配过程相关的变量是不同区域特征向量之间的空间距离。所有区域中都包含两类特征向量,分别是主要特征向量V,以及次要特征向量W,将车辆链表中第k个主要特征向量记为Vk,第k个次要特征向量记为Wk;将临时链表中第n个主要特征向量记为Vn,第n个次要特征向量记为Wn;将空间距离记为DVkn和DWkn,其中=(Vk-Vn)T(Vk-Vn),=(Wk-Wn)T(Wk-Wn)。
第一,确定特定区域K和临时链表中所有区域的空间距离DVkn,将计算得到的DVkn数值和事先设定的阈值进行比较,若所有的DVkn都大于阈值,则表示临时链表中不存在和区域K相似的区域;第二,若存在一个DVkn值小于阈值,则表示临时链表中存在一个和当前区域K相似的区域;第三,若小于阈值的DVkn的数量大于1,此时需要进一步计算上述区域和K之间的DWkn值,其中DWkn最小的那一个区域就是和K最为相似的区域。不断重复上述过程一直到浏览完车辆链表中所有元素,然后对车辆链表进行更新处理,具体做法是将成功匹配的临时链表区域替换原有的车辆链表区域,将未能匹配的临时链表区域加入车辆链表。
完成匹配操作后,笔者进一步提出了一种确定有效匹配和无效匹配次数的方法。笔者将有效匹配的次数记录为ms,将无效匹配的次数记录为mf,在初始时刻,当车辆链表中存在数据时就将该车辆记为临时车辆,此时该车辆的ms数值是1,mf数值是0,在接下来的匹配操作中,如果出现了有效匹配,那么ms的数值就加1,如果出现了无效匹配,那么mf数值就相应的加1。随着匹配操作的不断开展,mf和ms的数值都在不断增加,当mf的数值达到n/2(n取决于采样频率)时,表示该区域是不正确的,从车辆链表中剔除该区域;当ms的数值增加到n时,表示该车辆是可完全确认的。
二、实验与分析
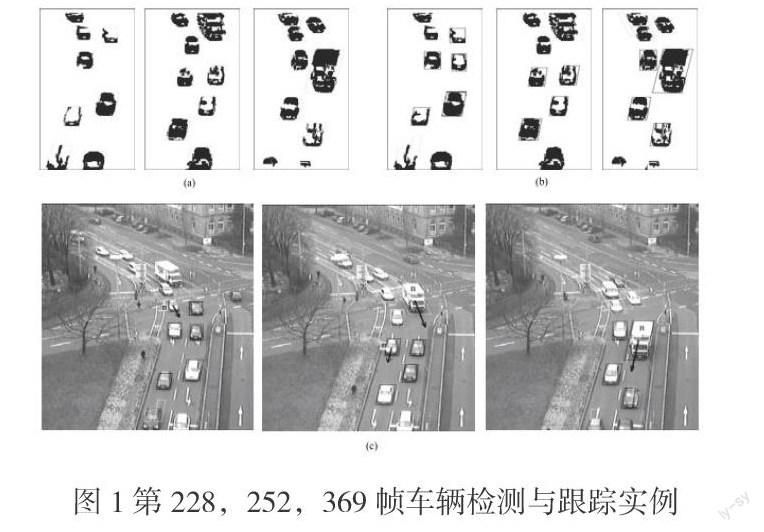
为验证本文提出方法的有效性,笔者通过实验进行验证。实验中所用图像大小是576×768,一共600帧,其中n的取值是30。图1显示的是通过本文方法处理图像的结果。通过本文方法处理后,最终准确率高达96%,这充分说明本文方法的有效性。
三、結语
背景差法是非常有效的车辆跟踪方法,基于区域的方法是非常有效的车辆检测方法,笔者将背景差法和区域跟踪法有机融合,形成了一种有效的区分临时车辆和确定车辆的车辆跟踪与检测方法。
参考文献:
[1]郁梅,王圣男,蒋刚毅.复杂交通场景中的车辆检测与跟踪新方法[J].光电工程,2005,02:67-70.
[2]袁俊,喻擎苍,曾瑶.一种复杂交通场景中的车辆检测与跟踪方法[J].工业控制计算机,2013,02:87-88+90.
猜你喜欢
中国新技术新产品(2017年6期)2017-03-20
财会学习(2017年4期)2017-03-15
中文信息(2016年9期)2017-02-04
中国科技纵横(2016年20期)2016-12-28
考试周刊(2016年64期)2016-09-22
计算技术与自动化(2015年2期)2015-09-09
农业科技与装备(2014年2期)2014-11-28
现代电子技术(2014年8期)2014-09-27
