
图像处理在杆影杆长定位技术中的应用
2016-05-30 18:09唐鹏张雷张枫笛
科技创新导报 2016年18期
唐鹏 张雷 张枫笛

DOI:10.16660/j.cnki.1674-098X.2016.18.170
摘 要:选取一段杆影随太阳高度角变化而变化的视频,通过Matlab提取部分包含主要信息的图像,并进行灰度化和二值化等预处理。运用Canny边缘检测算法提取预处理后图片的轮廓,得到失真度小、误检率较低的图片,再进行相应的坐标转化得到理想像素坐标,最后采用基于平面模板的两步法来改进摄像机的标定方式,利用非线性优化算法求解出内外参数值,使得图像处理在杆影杆长定位技术中得到更好的应用。
关键词:灰度化 二值化 平面模板 Canny边缘检测
中图分类号:P39 文献标识码:A 文章编号:1674-098X(2016)06(c)-0170-03
杆影杆长定位技术是通过一段杆影变化的视频,依托相关地理学和天文学知识,寻找视频拍摄地点或日期从而快速精确定位的新技术,能够在救援搜索中发挥重要作用。其中视频图像的处理尤为重要,如何高效率处理图像,并且提取有用信息是十分重要的。图像是能在人的视觉系统中产生相关视觉印象的客观对象,其包括有生活中的自然景物、机器拍摄到的图片或视频、用数学或者其他方式所表达描述的图形信息。由于自然界中普遍存在的图像都是模拟量,而目前普遍的计算机技术只能处理数字信号而不能处理模拟信号,故要对图像先进行数字化处理,然后采用一系列方法提取图像中的有用信息。
1 视频及图像的预处理
1.1 视频图像的提取
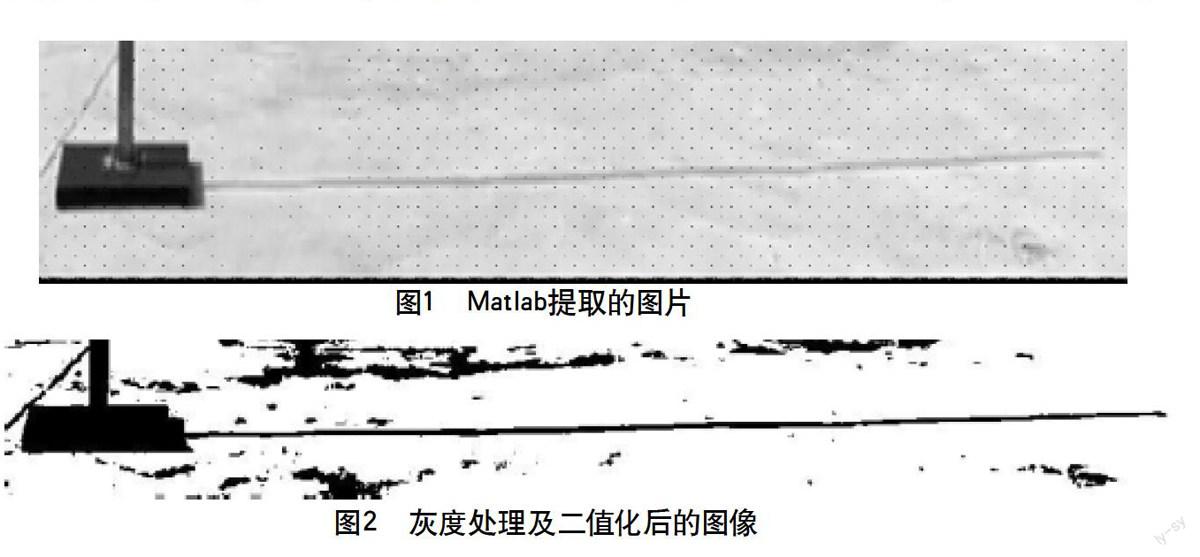
对一段杆影长度随着太阳高度角变化而变化的视频而言,首要任务是将视频中的图像进行提取,目前很多视频播放或图像处理软件均有自动截屏的功能,但所提取视频图像信息量大,处理效率低。往往需要处理的图像只是整张图片的部分区域,因此,使用Matlab对图像部分区域直接提取,从而减小工作量、增加其准确性。图1为用Matlab得到图片。
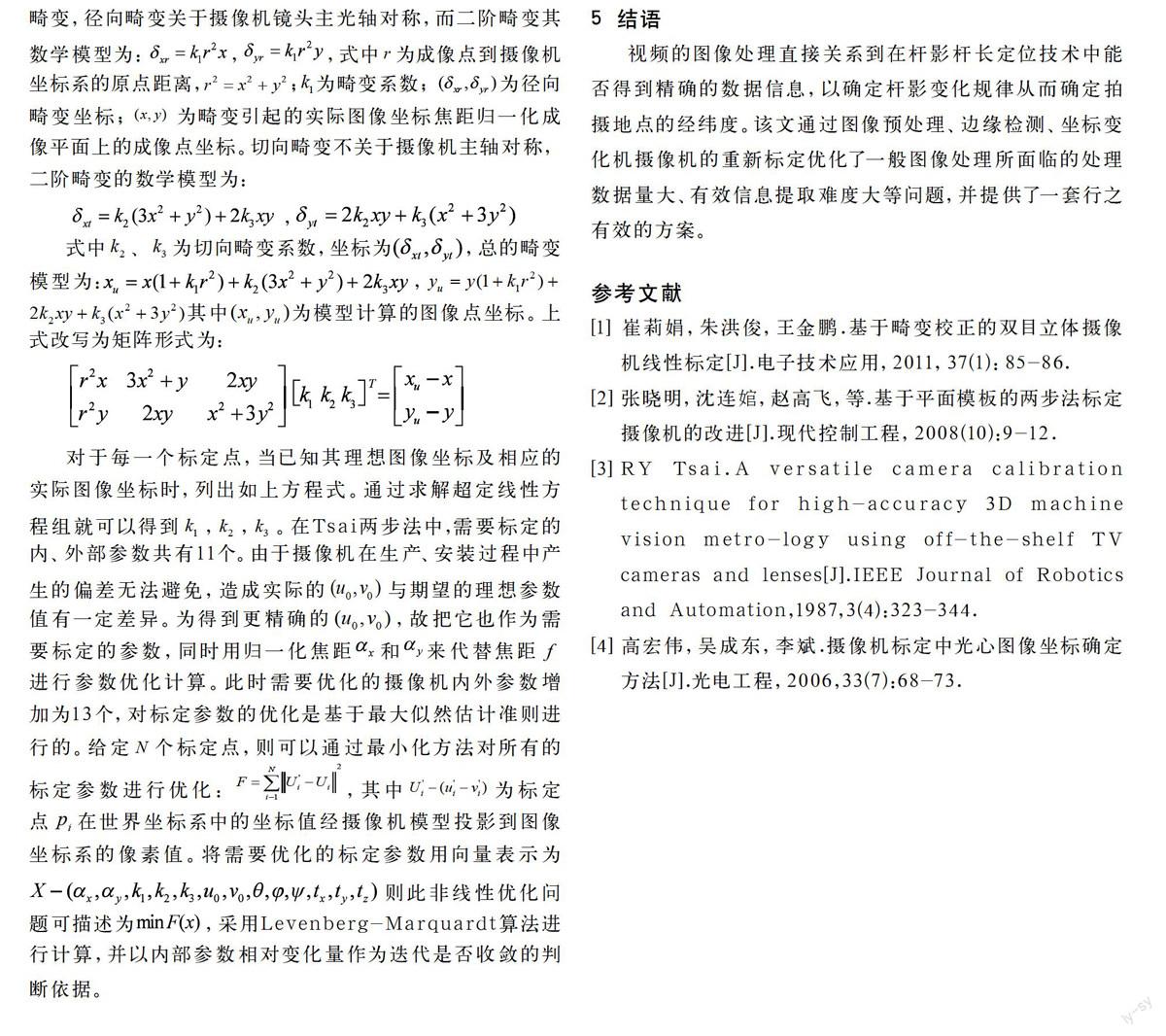
1.2 图像的灰度化及二值化处理
图像的灰度化处理是点运算的一种,即将图像中的每个像素依次进行同样的灰度变换运算。
为了进一步处理图像,减小处理的数据量,同时得到研究的对象轮廓,将256个亮度等级的灰度图像通过阈值选取以获得仍然可以反映图像整体和局部特征的二值化图像,如图2所示。
2 基于Canny边缘检测法的图像轮廓提取
2.1 Canny边缘检测法基本原理
图像边缘检测必须能有效地抑制噪声且尽量精确确定边缘位置,根据对信噪比与定位乘积的测度,得到最优化逼近算子即Canny边缘检测算子。为了尽可能多地标识出图像中的实际边缘,Canny边缘检测法采用了先平滑后求导的方法。
