一种基于激光跟踪仪的大飞机外形测绘建模方法
2016-05-30 07:38范晓龙刘韶光范欢欢
航空制造技术 2016年14期
范晓龙,刘韶光,范欢欢
(中国飞行试验研究院,西安 710089)
随着测量科学技术与飞机现代化制造技术的飞速发展,基于数字化测量的逆向设计技术以其测量精度高,测绘建模效率显著提升,测绘建模环境适应能力不断增强等优势在飞机外形测绘建模领域应用越来越广,飞机外形测绘建模是现役飞机数字化的重要手段,飞机测绘建模的需求也日趋旺盛。飞机测绘建模的方法众多,有分解后局部测绘建模,有局部扫描测绘建模,也有小飞机整机扫描测绘建模,但是还没有见到大飞机整机测绘建模的报道[1]。
通过大飞机测绘建模建立整机飞机外形、相关结构件以及工艺装备的数字化模型,可充分发挥飞机数字化设计的优势,可以有效推动实现智能化、集成化的产品数据交换,适应现代飞机研制过程中的数控加工、虚拟装配、有限元分析等数字化要求,缩短飞机的改进改型周期[2],在飞机的改型、改进、改装中发挥重要作用。
1 基于激光跟踪仪的大飞机外形测绘方法介绍
基于激光跟踪仪的大飞机外形测绘建模是针对一些尺寸大的飞机或特殊飞行器提出的整机停机状态下非接触式测绘建模方法,其测绘建模对象尺寸非常大,翼展超过40m,三视图尺寸46m×42m×14m,测绘精度要求高,要测绘建模的内容非常繁多,不仅包括机头、机身、机翼、发动机舱、平尾和垂尾等关键部件的整体外形测绘建模,还需进行巡航、起飞、降落等不同构型状态下的各活动翼面的不同位置的外形测绘建模等。这样通过大飞机外形一体化测绘建模可以获得飞机外形完整、建模精度高,模型曲面光滑的飞机外形数模,该数模完全可以作为二次开发和设计的依据和基础,只要对该数模再进一步处理一下就可以进行有限元分析。
我国传统的测绘手段依然是以手工测量为主,根本无法满足整机测绘建模要求,逆向设计技术是整机测绘建模不二之选,尤其是采用基于激光跟踪仪为主的多数字化测量仪器组合的方式,该测绘建模方式不仅可以克服测量范围大与测量精度低的矛盾,还可以获得精确的点云数据,而且可满足全方位测量的要求,大大提高了测绘建模系统的可扩展性及适用范围[3]。
飞机测绘建模方法多,可以采用的软件平台也比较多,但其核心目标是按照计划精度要求及质量要求重建整机实物数字化模型。基于激光跟踪仪的大飞机外形测绘建模主要包含5个环节:测绘建模平台的搭建、整机逆向数据采集、点云数据处理、曲面模型重建、重建模型质量分析,如图1所示。
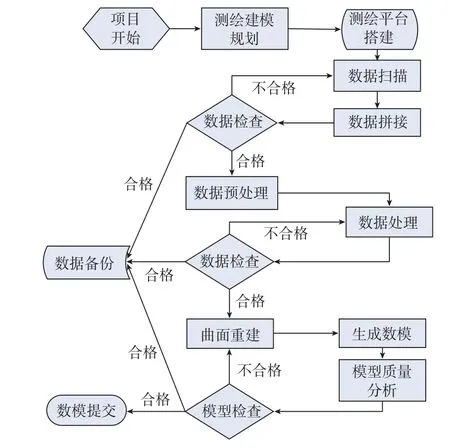
图1 飞机测绘建模流程图Fig.1 Aircraft measurement and modeling flowchart
1.1 飞机测绘建模平台
飞机测绘建模平台的搭建主要包括:全机数字化测量系统的选择、测量工装型架以及地面转站基准的布置、专用数据处理平台的搭建、三维模型重建及优化设计平台的选择。
数字化测量系统即飞机表面测量的数字化测量系统,是指通过特定的测量设备和测量方法,将飞机复杂曲面的表面形状转化成既定坐标系下离散的几何点坐标数据即点云数据,有了点云数据就可以进行飞机复杂曲面模型重建、测量评价、优化设计和虚拟制造。因此,高精度、高效率、全方位的进行飞机复杂曲面点云数据采集,是全机外形测绘建模的基础。目前用来进行飞机表面点云数据采集的设备和方法多种多样,测量采集原理也各不相同。因此不同的点云数据采集方法,不但决定了点云数据测量本身的精度、测量的效率和测量的经济性,也使得数据类型和后续处理方式不尽相同[3]。
飞机测绘建模是为后续飞机研发设计、变形测量、部件加工制造、快速原型修复、虚拟制造仿真、工程分析和产品再设计提供三维数学模型支持,所以飞机外形和曲面特征的三维模型重建是整机测绘建模过程中最关键、最复杂的环节之一。国际上主要的逆向设计及点云数据处理及模型重建专用软件有很多,主要包括:Imageware、Geomagic Studio、Polyworks、CopyCAD、Rapidform等,此外,在CATIA、UG、Pro/E等国内广泛应用的主流三维设计软件中也都集成了类似模块。由于CATIA软件在世界航空工业领域的特殊地位,结合实际情况本文的整机外形测绘建模的数据处理采用Imageware和Geomagic Studio软件,三维模型重建及优化设计采用CATIA软件[3]。
1.2 全机外形测绘建模规划
全机外形测绘建模规划是根据测绘飞机的实际情况,将飞机外形划分不同部位,选择不同的测绘扫描设备制定的测绘方案。针对大型飞机测绘建模的特点,规划了以激光跟踪仪为测量定位基础,结合使用激光跟踪仪加激光扫描仪和激光跟踪仪加手持便携式激光扫描仪的外形扫描测绘方案。例如:由于机头和机身相对开畅,没有什么遮挡物,所以采用激光跟踪仪加激光扫描仪来对这一部分进行扫描。机翼、平尾和发动机舱及挂架外形扫描,这几部分的特点是结构复杂,且有遮挡,所以采用便携性更好的手持便携式激光扫描仪配合光学坐标测量系统以及激光跟踪仪来对这一部分进行定位扫描。垂尾由于太高,用跟踪仪测量受到空间和高度的限制,所以可以采用手持便携式激光扫描仪加光学坐标测量系统来对这一部分进行扫描。襟、副翼及平尾和其他状态下的机翼扫描利用手持便携式激光扫描仪的自定位技术及动态测量技术完成外形扫描工作,根据所选配套设备各自的特点,同时也结合不同的飞机实际情况,针对飞机不同位置分别制定了最佳的测绘方案,才能保证完成全机外形测绘建模。
1.3 全机外形扫描
全机外形扫描前的关键环节是飞机测绘坐标系建立,飞机测绘坐标系是所有测量工作数据有效拼接的基础。使用激光跟踪仪及测量软件测量分布在飞机左右及腹部的基点,并标记测量点的名称以便与图纸的标注相符合,在这个过程中还需要添加跟踪仪的转站基点。确认数据后则按照飞机图纸的要求创建飞机坐标系:点、线、面方式;并对创建的飞机坐标系在此进行验证;在对创建飞机的坐标系验证并确认的基础上,开始测量飞机机身上的基准点;而且使得这些基准点的个数及分布合理且包容需要扫描的飞机相关部位,这些基点的分布沿机身航向及垂直航向的方向呈空间立体分布,这个测量数据与创建飞机坐标系的测量文件共用相同的测量文件。
飞机机身外形扫描,将激光跟踪仪放置于飞机机身合适位置处,架高到与机身相同高度;用激光跟踪仪测量飞机机身上基准点坐标并与这些基准点在飞机坐标系下的理论值进行拟合对齐,找到激光跟踪仪基于飞机坐标系的位置;用该跟踪仪结合激光扫描仪对整机机身外形进行扫描,扫描的点云都是基于飞机坐标系下的点云。采用同样的方法分段完成机头、前段机身、机身中段、后段机身的扫描。机头扫描结果如图2所示。

图2 机头外形扫描点云Fig.2 Aeroplane nose shape scanning point cloud
飞机的其他部位使用手持便携式激光扫描仪、光学坐标测量系统及激光跟踪仪结合的方法进行扫描,首先利用激光跟踪仪测量飞机机身上基准点坐标并与这些基准点在飞机坐标系下的理论值进行拟合对齐,找到激光跟踪仪基于飞机坐标系的位置;用激光跟踪仪测量指定部位上提前预设的若干个基准点坐标,同时用光学测量系统也测量这些基准点,这样就把光学测量系统与手持便携式激光扫描仪系统测绘的数据也统一到飞机坐标系中,采用同样的方法分段完成发动机、机翼、水平安定面、垂直安定面等部位的扫描。发动机、机翼扫描结果如图3、图4所示。
最后按飞机外形曲面划分:机头、前机身、前中机身、机身中段、后机身、发动机、水平安定面、垂直安定面、机翼、襟翼、翼尖、起落架、尾椎等部位,完成全机扫描数据拼接,数据拼接后如图5所示。最终所有扫描工作在10个工作日完成,所有扫描数据均以点云或三角面片的格式输出。全机扫描数据统计如表1所示。
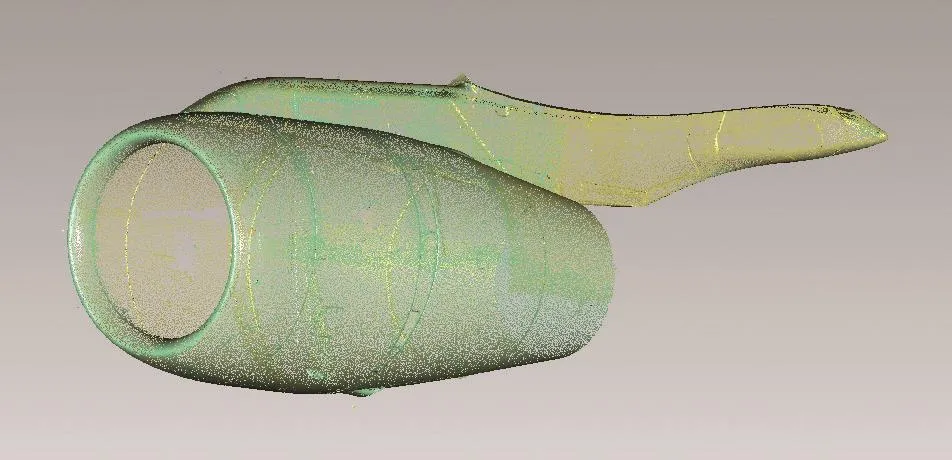
图3 发动机扫描结果Fig.3 Engine scanning result

图4 机翼扫描结果Fig.4 Wing scanning result
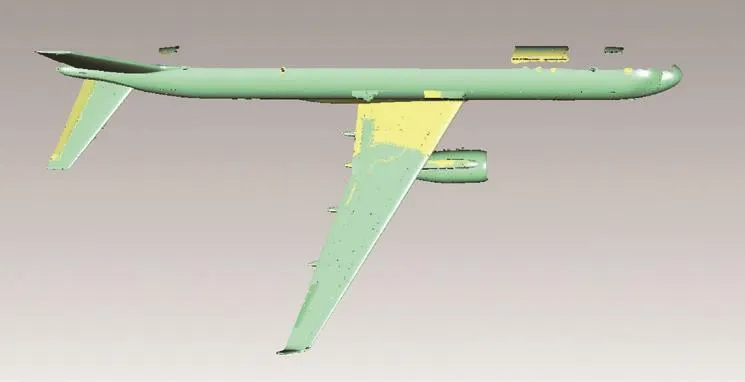
图5 全机扫描数据拼接Fig.5 Full aircraft scanning data splicing

表1 全机扫描数据统计表
2 飞机扫描数据处理方法
整机外形测绘原始数据具有海量、离散的特点。测绘原始数据总量多达几十个GB,点云数据总点数量也可能达到几亿个点。本文整机测绘建模方法采用激光跟踪仪及手持便携式激光扫描仪联合完成,两种设备扫描数据输出格式分别为.txt格式点云数据及.stl格式点云数据,.txt格式为纯文本文件格式,扫描测绘数据点在.txt文本中以x、y、z三坐标值形式记录。.stl 文件由多个三角形面片的定义组成,每个三角形面片的定义包括三角形各个定点的三维坐标及三角形面片的法矢量。这些整机外形测绘扫描原始数据首先需要进行数据预处理、数据处理,然后才可以用于后续的数据分析及模型重构。
在数据预处理、数据处理主要包含:局部数据拼接、点云降噪、点云补全、点云拼接以及数据精简/压缩等部分。处理后全机外形测绘数据更加规整,便于后续曲面重构设计。处理后全机外形数据如图6所示。
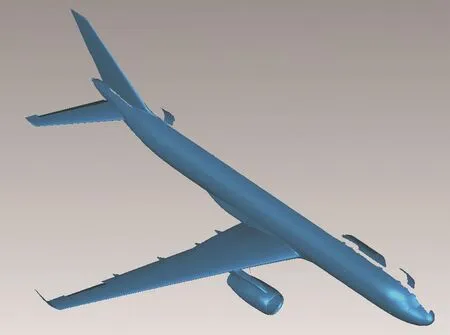
图6 处理后全机扫描数据Fig.6 Processed full aircraft scanning data
3 全机外形数模建立
飞机外形曲面重建需首先分析飞机外形曲面特征,对飞机外形曲面进行分块,按区域不同特点选用不同的曲面类型进行重建,外形曲面重建过程中对内部结构不予考虑。
按飞机构形规律将飞机分为机身(前、中、后段),机翼(襟翼、副翼、翼尖等),尾翼(垂直安定面、水平安定面),起落架(简化模型)等部分,再用符合设计规律的曲面特征来重建。
飞机外形主要包含以下曲面特征:直纹面、规则曲面(二次曲面、规则扫掠面)、自由曲面、过渡面。飞机外形曲面重建在Imageware软件平台中完成特征线的提取、构建以及初始面片的拟合;最终在Catia软件平台中完成曲面重建任务。
针对飞机整机点云数据的海量、大尺寸、精度要求高的特点,整机外形曲面数字模型建立采用“点—线—面”的曲面重建策略。曲面表达采用了计算机图形学中最具代表性、通用性最强的NURBS曲面。数字模型建立经历了特征识别、基于数据的曲面分块、曲线的构建、基础曲面构建、以点云重合度和光顺性为目标的曲面修改、过渡曲面创建、以G2为目标的曲面匹配、曲面品质检测等多个阶段。
3.1 特征识别
飞机外形曲面中有很多二次曲面,如机翼、平尾中的设计采用的平面;机身平直段的圆柱面。此类平面、柱面、锥面、球面、直纹面等二次曲面在设计上已经给予了严格的数学定义,若采用自由曲面拟合的话既增加了建模难度,又违背了设计意图。因此在整机曲面构建之前应对该类二次曲面进行特征识别,保证逆向重建的模型特征与原机最接近。
3.2 基于数据的曲面分块
在飞机外形曲面逆向设计中,由初始测量点云经过处理一次生成符合要求的单张曲面十分难实现,而且生成曲面的质量在光顺性和控制点数量上也不能满足要求。因此模型重建前首先需要对曲面构造方法进行规划,根据构面方案将点云数据按曲面特征进行分块,分别进行基础曲面重建,然后通过补全、过渡、桥接、裁剪等细节特征处理最终生成全部所需外形曲面[4]。
按特征将曲面分块对于复杂曲面重建的效率和质量都有重要的影响,总体目标是使用最简单有效的方法分别构造各个子曲面的全部特征,再以最便捷的方式来完成各个子曲面的过渡与连接,以最小的工作量最大程度地反应点云数据的特征。
3.3 整机外形数模建立
整机外形数模建立包括:机头和部分前机身、机身中段、发动机舱及挂架、机翼、后端机身、平尾、垂尾等,如图7所示。总体建模思想是首先构建线架曲线,在此基础上采用UV网格的方式构建基础曲面,再通过G2匹配的方式使多张基础曲面达到G2连续或G0匹配[5-6]。

图7 整机外形数模Fig.7 Full plane shape mathematical model
构建线架曲线时,U向曲线为平面曲线,用与坐标系平行的平面切点云数据得到;V向曲线可通过空间自由曲线投影到点云数据上得到的投影点均匀拟合得到。创建好的线架曲线须进行重新参数化处理,以保证同张曲面对应的曲线控制点数量相同,形状一致,最重要的是曲面不允许出现明显的拐点和曲率突变点。
基础曲面构建以线架曲线为基础,在Imageware软件环境中,通过 B-Loft、Surface w/4 Points、Surface by boundary生成基础曲面。调整UV方向的控制点的位置来调整曲面与点云的贴合程度和曲面的光顺程度。通过延伸曲面、裁剪曲面、相交曲线等操作来控制整体曲面的形状,使其尽可能地测绘点云重合[7-8]。在进行曲面拟合时,要将表面数据划分为具有行边结构的区域(通常为四边或三边域),各个曲面间过渡通过桥接曲面或圆角来过渡,在生成曲面时为保证曲面片之间的G2连续性必须在曲面之间公共边施加约束[9-10]。最后在Catia软件平台内通过编辑、修剪、倒角形成整体曲面,最终所有模型重建工作在15个工作日完成[4,11]。
4 整机模型重建质量分析
整机模型重建质量分析主要包括:曲面阶数分析、曲面的光顺性分析、数据模型曲面与点云检测等内容。整机模型重建过程中的曲面重建采用NURBS曲面,可满足工程设计的精度要求,且保证曲面光顺性的NURBS来定义曲面,在保证光顺的前提下尽量降低阶数,除个别复杂过渡曲面外阶数不超过10阶。整机模型曲面光顺性检测采用斑马线检测方法,斑马线检测主要通过斑马线是否光顺连续,粗细变化均匀,是否有波浪漩涡来检测光顺性。整机模型重建所构造的曲面经斑马线检测后光顺连续,粗细变化均匀无波浪漩涡,满足曲面光顺性要求[12-13]。斑马线检测检查结果如图8所示。
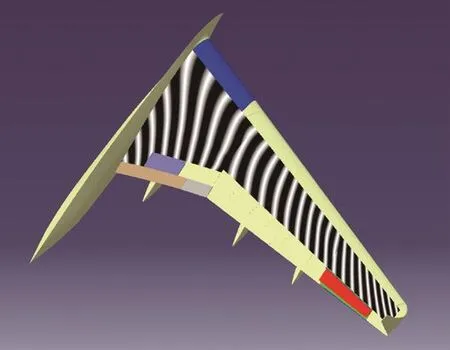
图8 上翼面曲面斑马线图Fig.8 Zebra line graph of upper surface of wing
检测飞机外形重建曲面和测量点云数据重合程度,反映了模型重建过程的精度,最终通用的检测方法是误差分析法。模型重建后将重建曲面与对应点云数据拟合,可以利用测量点的参数直接算出所选测点的误差,也可以用一定数量平均分布的测量点的最大拟合偏差、最小拟合偏差或标准差来评价曲面与点云数据的拟合程度,绝大多数情况用平均偏差来评价曲面与点云数据的逼近程度[5,14]。在飞机测绘建模过程中,平均偏差是评价飞机外形重建曲面与扫描点云重合度的最重要的指标,反映了模型重建精度,使用Catia V5软件中Deviation Analysis工具对飞机整机曲面或部分区域外形曲面与对应点云数据进行误差分析,整机曲面和点云的平均偏差(Mean Dev)小于2mm。机翼检测结果如图9所示。
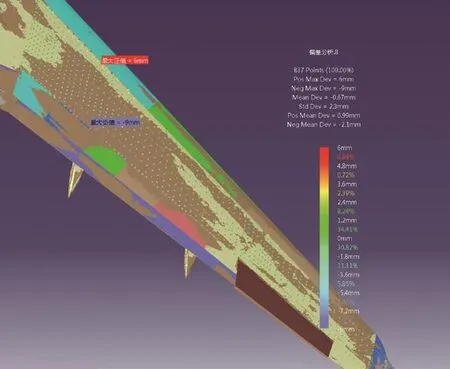
图9 机翼部分典型曲面和点云的误差云图Fig.9 Error nephogram of typical surface and point cloud of wing section
5 大飞机测绘建模误差分析
基于激光跟踪仪的大飞机外形测绘建模的误差是一个整体的全局性误差,主要产生在整机逆向数据采集、点云数据处理、曲面模型重建3个阶段,反应为扫描测量误差及模型重建误差两种形式。全机外形测绘建模过程中产生的各种误差是随机的,满足正态分布规律,总误差分配如公式(1)所示[15-16]。

式中,Δi(i= 1,2,…,n) 就是各种分项误差。
根据以上分析最终得出全机外形测绘建模总误差分配如公式(2)所示。

5.1 整机扫描过程数据误差分析
整机测绘扫描的误差源有以下几个方面:测量及扫描设备的精度、激光跟踪仪的转栈及基准拟合拼接误差及环境变化带来的影响等。最终全机点云数据扫描整体精度由局部精度、转栈精度、拟合精度、整机全局坐标测量不确定度以及环境变化不确定度组成,扫描测量精度如公式(3)所示。

项目实施过程的Δ扫描测量为0.3404mm。
5.2 整机点云处理及模型重建误差分析
整机点云处理及模型重建误差主要由以下原因产生:首先点云微观上是非光顺的,其主要原因是飞机蒙皮在飞机使用过程中产生了法向变形。而飞机外形重建曲面是严格意义的Nurbs曲面,是绝对光顺的。因此飞机外形曲面与点云必然会存在误差;其次整机外形曲面重建忽略了部分飞机外形特征如雨刷,天线等,因此局部区域飞机外形曲面与点云会存在相当大的“误差”;最后整机测绘阶段有部分区域点云数据无法采集造成点云缺失,在飞机外形曲面重建时,这部分区域曲面进行了重建。在用工具进行误差分析时,这部分区域曲面会作为偏差引入总误差。
整机点云处理及模型重建误差定量计算在飞机重建外形曲面与测绘点云数据重合度检测基础上进行,由飞机各部件模型重建精度综合确定,各部件模型重建精度为各部件曲面和点云的平均偏差。模型重建精度如公式(4)所示。


项目实施过程的Δ模型重建为1.9717 mm。
5.3 整机测绘建模误差分析结果
将Δ扫描测量340.44µm、Δ模型重建1971.78µm带入公式(2)得出 Δ总体为2.0010mm。
整机测绘建模误差是实际存在且不可消除的,在工程实践中应尽可能减小,本次工程实践通过对整机测绘建模误差产生原因的分析,对误差的各项来源进行严格控制,项目实践表明整机测绘建模误差在2mm左右。
6 结束语
本文介绍了一种利用激光跟踪仪作为定位基准的大飞机激光扫描测绘建模方法,测绘效率高,测绘精度高。在飞机制造技术迅猛发展的今天,大型飞机测绘建模的需求也日趋旺盛,大尺寸空间的精密数字化测量方法在大飞机模型重建中发挥的作用越来越重要。采用先进的测绘建模方法不仅能大幅度提升大飞机测绘建模的质量和效率, 而且能适应顶层飞机数字化设计模式,测绘建模的结果可以直接进行二次开发和利用。此外,该方法还有广泛的适应性,可以应用到航空、航天、船舶、兵器等需要大尺寸构件的测绘建模领域,对国内逆向设计技术应用赶超国际先进水平大有裨益。
[1]周娜,安志勇,李丽娟,等. 飞机数字化测量网络布站设计[J].光学精密工程, 2012, 20(7):1485-1491.
ZHOU Na, AN Zhiyong, LI Lijuan,et al. Aircraft digital measurement network station design[J]. Optics and Precision Engineering, 2012,20(7):1485-1491.
[2]谭昌柏,周来水,张丽艳,等. 飞机外形和结构件反求建模技术研究[J].航空学报, 2008, 29(6):1722-1730.
TAN Changbai, ZHOU Laishui, ZHANG Liyan. Aircraft shape and structure reverse modeling technology research[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(6):1722-1730.
[3]缪华,霍有朝. 漫谈CATIA与逆向工程[J].CAD/CAM与制造业信息化, 2008(12):20-23.
MIU Hua, HUO Youzhao. Ramble on CATIA and reverse engineering[J]. Digital Manufacturing Industry, 2008(12):20-23.
[4]周煜,杜发荣,高峰. 基于Imageware软件的汽车内饰逆向设计方法[J].机械设计, 2006, 23(8):47-49.
ZHOU Yu, DU Farong, GAO Feng. Car interior reverse design method based on imageware software[J]. Journal of Machine Design, 2006,23(8):47-49.
[5]王莉,方伟,邢宏文. 大尺寸空间测量方法的实施及应用[J].南京航空航天大学学报, 2012, 44(B04):48-51.
WANG Li, FANG Wei, XING Hongwen. The implementation and application of the large size space measurement method[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2012, 44(B04):48-51.
[6]刘韶光,范欢欢,范晓龙,等. 激光测绘系统在试验机改装中的应用研究[J].机械与电子, 2014(7):53-55.
LIU Shaoguang, FAN Huanhuan, FAN Xiaolong,et al. Study on laser mapping system application in the aircraft modification[J]. Machinery &Electronics, 2014(7):53-55.
[7]王延凤. 激光跟踪仪结合CATIA 在飞机外形测绘中的应用[C]//中国航空学会飞机总体专业委员会飞机几何设计专业学组第五次学术交流会论文汇编. 中国航空学会, 2002:55-63 .
WANG Yanfeng. The application of laser tracker with CATIA in surveying and mapping for plane shape[C]// Chinese Society of Aeronautics and Astronautics Collection of Papers for the 5th Academic Communication. CSAA, 2002:55-63.
[8]党育辉. 某型公务机全机外形快速测绘及曲面重构初步研究[C]//中国航空学会总体分会几何设计专业第七次学术交流年会论文集 . 中国航空学会, 2007:48-52 .
DANG Yuhui. A preliminary research on surveying and mapping and surface reconstruction for the whole plane configuration of a certain type official plane[C]//Chinese Society of Aeronautics and Astronautics Collection of Papers for the 7th Academic Communication. CSAA,2007:48-52.
[9]汪俊.飞机结构件反求建模关键技术研究[D]. 南京:南京航空航天大学,2007 .
WANG Jun. Key techniques of aircraft structure reverse modeling[D].Nanjing :Nanjing University of Aeronautics and Astronautics, 2007.
[10]徐凤. 基于激光跟踪原理的飞机形面测量技术研究[D]. 长春:长春理工大学 , 2007 .
XU Feng. Research on the measurement technology of aircraft shape surface based on laser tracking principle [D]. Changchun: Changchun University of Science and Technology, 2007.
[11]韩清华,郑保,郭宏利,等. 采用激光跟踪仪测量飞机外形[J].航空计测技术,2004,1(24):15-16.
HAN Qinghua, ZHENG Bao, GUO Hongli. The plane shape measurement by laser tracker [J]. Aviation Metrology & Measurement Technology, 2004,1(24):15-16.
[12]张福民,曲兴华,叶声华. 面向对象的大尺寸测量不确定度分析[J]. 光学精密工程, 2008, 16(11):2239-2243.
ZHANG Fumin, QU Xinghua, YE Shenghua. Object-oriented uncertainty analysis of the large size measurement [J].Optics and Precision Engineering, 2008, 16(11):2239-2243.
[13]赵威成. 三维激光扫描系统点云数据向AutoCAD数据格式的转换[J].测绘工程, 2010, 19(1):25-27.
ZHAO Weicheng. The conversion of point cloud data to AutoCAD data format of 3D laser scanning [J]. Surveying and Mapping Engineering,2010, 19(1):25-27.
[14]王建文, 杜春梅. 三维激光扫描系统的关键性技术研究[J].计算机工程与设计, 2010, 31(5):1089-1092.
WANG Jianwen, DU Chunmei. Research on key technologies of 3d laser scanning system [J]. Computer Engineering and Design, 2010,31(5):1089-1092 .
[15]杨建元,刘红军,韩育航,等. 新型三维数字扫描设备在飞机加改装工程中的应用研究[J]. 航空维修与工程, 2010(2):51-53.
YANG Jianyuan, LIU Hongjun, HAN Yuhang. Research on the application of new 3D digital scanning equipment in aircraft modification [J].Aviation Maintenance & Engineering, 2010(2):51-53 .
[16]范均,王雷刚. 三维激光扫描仪的测量精度控制定量分析[J]. 工具技术, 2012, 46(6):73-75.
FAN Jun, WANG Leigang. Quantitative analysis on precision control of measuring based on 3D laser scanner [J]. Tool Engineering, 2012,46(6):73-75.
猜你喜欢
数学年刊A辑(中文版)(2022年1期)2022-08-20
中国品牌(2021年7期)2021-08-09
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
数学年刊A辑(中文版)(2019年1期)2019-01-31
中国公共安全(2017年7期)2017-10-13
卷宗(2017年16期)2017-08-30
电子制作(2017年9期)2017-04-17
浙江大学学报(工学版)(2016年10期)2016-06-05
中国医疗美容(2015年1期)2015-07-12