
小型折叠翼多用途无人机折叠方案及其展开机构设计*
2016-05-30 03:23张付祥
航空制造技术 2016年7期
张付祥 ,张 诺
(1.河北科技大学机械工程学院,石家庄 050018;2.河北工程技术学院经济管理学院,石家庄 050091)
随着现代战争模式的发展,对飞行器能够高效地完成多任务的要求越来越强烈[1]。多任务就意味着飞机既要有良好的低速巡航飞行能力,又要有优秀的高速冲刺能力。然而飞机设计中低速和高速是两个相互冲突的设计模式。为了能兼顾低速和高速设计上的矛盾,美国洛克希德·马丁(Lockheed Martin)公司在美国国防预研计划局(DARPA)的变体飞机结构项目(MAS)的指导下,提出了折叠翼飞机方案[2],该方案可以较好地解决飞机在不同任务阶段对飞行速度需求的矛盾。国外对这一新概念飞行器的气动特性[3-4]与颤振特性[5-6]进行了较为丰富的研究,国内也利用准静态分析的方法对机翼颤振特性展开研究[7],并且提出了一些实用的折叠机构设计[8],以色列埃尔比特公司研制的海鸥(Seagull)就是这样一种小型折叠翼变体无人机[9]。现役小型无人机大多采用拆解后运输的方式,虽然运输体积较小,但部件零散,需要起飞前现场组装调试,准备时间长,不能适应现代战争快节奏的特点。因此,需要设计一款运输体积小,并且可以快速发射部署的新型折叠翼战术无人机系统。
1 折叠方案设计
1.1 折叠翼气动布局分析
折叠翼气动布局方案有如图1所示的几种形式。
(1)常规布局方案。机翼和尾翼靠轴和轴承与机身中部连接,主翼为一整片矩形翼,可绕位于机翼中点处的轴旋转,折叠后与机身上表面重合,尾翼则绕位于翼根处的轴向前旋转,与机身下表面重合。
(2)简单串列翼布局方案。前翼和后翼均由两片矩形翼组成,由位于翼根处的轴和轴承与机身端部连接。折叠时,前翼向后折叠于机身下侧,后翼向前折叠于机身上侧。
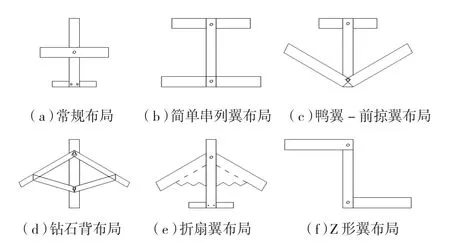
图1 折叠翼气动布局方案Fig.1 Aerodynamic layout programs of folding-wing
(3)鸭翼-前掠翼布局方案。主翼和鸭翼由位于翼根处的轴和轴承与机身端部连接,主翼展开时与机身呈前掠角,向前旋转可以折叠于机身上侧,两片鸭翼则分别向后折叠于机身下侧。
(4)钻石背布局方案。前翼由位于翼根处的轴和轴承与机身前部连接,后翼由位于翼根处的轴和轴承与滑块连接,滑块则套在与机身固定的滑轨上,后翼翼尖与前翼翼稍处通过轴和轴承连在一起。展开时,前翼后掠,后翼前掠。折叠时,滑块向前平移,带动前后翼向后折叠于机身上侧。
(5)折扇翼布局方案。前刚性翼由位于翼根处的轴和轴承与机身前部连接,后缘与折扇翼前缘相连,折扇翼可以像折扇一样绕轴折叠。展开时,前翼后掠,折扇翼张开,共同构成大面积机翼;折叠时,前翼可以向后折叠于机翼下侧,同时带动折扇翼折叠于两翼内侧。
(6)Z形翼布局方案是本课题组根据现有折叠翼布局方案独立提出的新型方案。英国专利GB2434783发明了一款前翼为上下折叠但尾翼定的布局方案,如图2所示[10],由于尾翼不能折叠,其折叠后体积偏大。美国高级产品开发有限公司威廉·兰道尔·麦克唐奈申请的中国发明专利200880105018.0发明了一种酷似Z形翼布局的飞翼式飞机,如图3所示[11],属于固定翼飞机,其外形给发明Z形翼布局的折叠翼飞机提供了参考。本课题设计的Z形翼布局方案由左前翼和右后翼构成,机翼在翼根处通过轴和轴承与机身端部连接,展开时整机呈不对称的Z形状态,折叠时,前翼向后,后翼向前,折叠于机身上下两侧。
1.2 Z形翼折叠方案的受力分析
对该构型进行受力分析,主要结果如下。
(1)理想情况下的受力,即飞机在无上反角、无倾角状态下飞行时,飞机不受滚转力矩。
(2)侧倾时的受力,即无上反、有倾角状态下,飞机也不受滚转力矩。
(3)有上反角时的受力,飞机存在向右滚转的趋势。
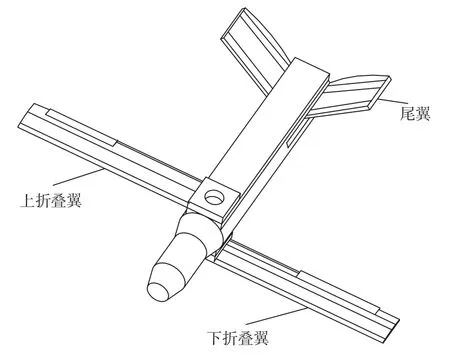
图2 前翼折叠无人机Fig.2 Folded front-wing UAV
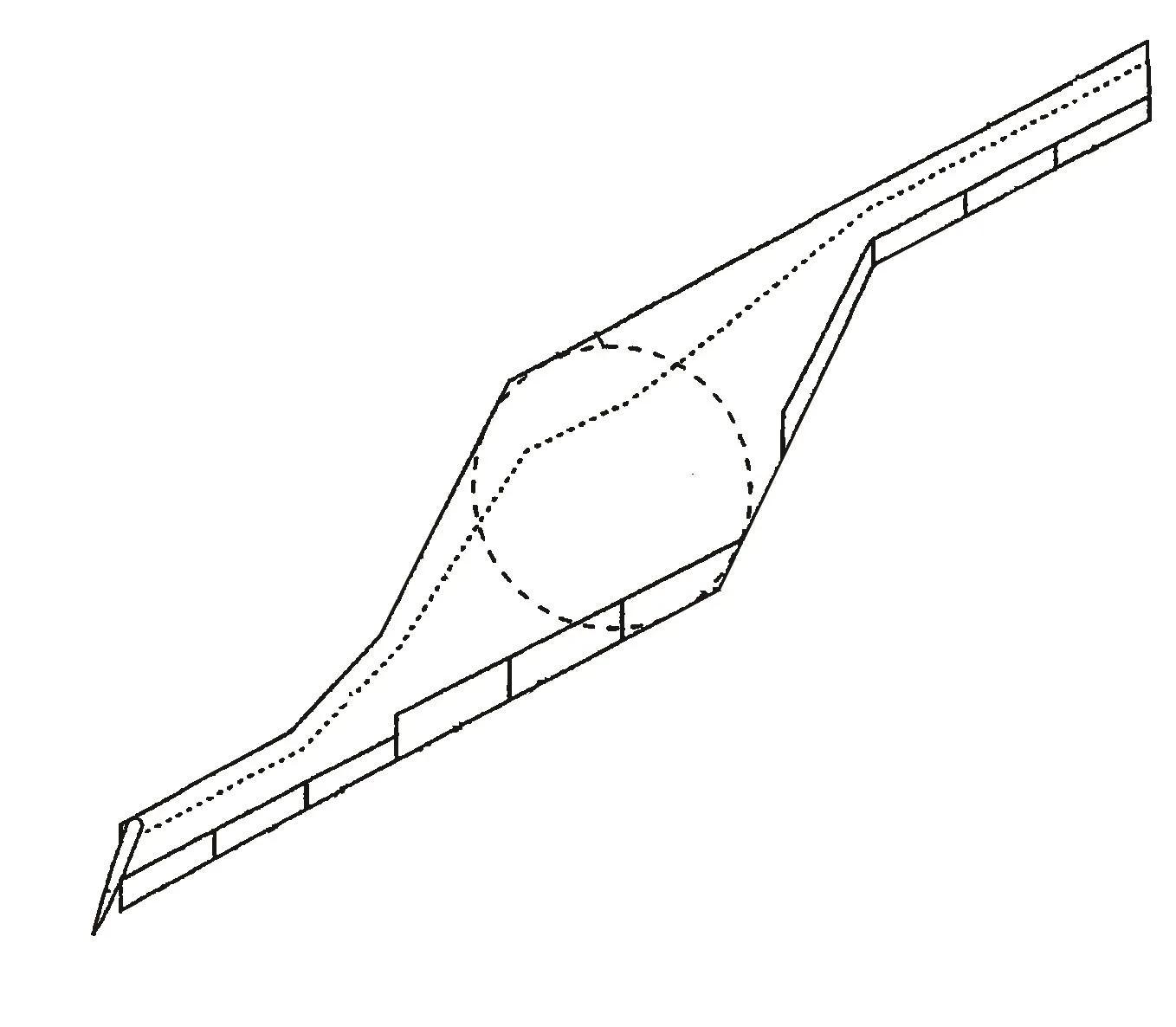
图3 斜置翼身融合飞机Fig.3 Canted blended wing body (BWB) UAV
(4)既有上反又有倾角时的受力,飞机受滚转力矩M与倾角α、上反角θ的关系为:
式中,机翼升力大小为F,升力作用点到翼根的距离为L,翼根到重心高度差为H,飞机自重为G。飞机所受的滚转力矩随机翼升力大小、上反角、高度差以及飞机倾角的增大而增大。
控制机翼高度差与上反角的大小对抑制飞机的滚转十分有益,并且应使飞机尽量在小倾角状态下平稳飞行。验证机的试飞证明Z形翼布局飞机可以实现受控稳定的飞行。
1.3 折叠翼方案的原理验证
课题组对列举的所有方案进行了大量原理验证机的制作试飞工作,其中就包括简单串列翼布局飞机(简称“工”字机)和Z形翼布局飞机(简称“Z”字机)。
通过大量的试飞研究,重点比较了“工”字机和“Z”字机的一些特性。发现“工”字机翼面积很大,翼载荷小,起飞速度低,但后翼效率远低于前翼效率,致使重心必须非常靠前才能将飞机配平,并且当机翼攻角小于某个负值后,飞机俯仰特性将是发散的,因而“工”字机不能可控地完成俯冲动作。“Z”字机气动外形虽然是不对称结构,但实际飞行试验表明,“Z”字机可以稳定可控地飞行,在气动舵面与接收机之间引入陀螺仪的负反馈信号,形成半闭环控制系统后,飞行稳定性又可成倍提高。由于翼面积只有“工”字机的一半,因而起飞速度较快,翼载荷较“工”字机的大。
通过以上对比,结合过去的研究基础,考虑简化展开机构、保留大的有效载荷舱体积的设计要求,最终决定采用Z形翼布局。
2 折叠展开机构设计
机翼折叠展开机构是Z字型折叠翼飞机的关键性部件,连接机翼与机身,集中承受飞行时机翼所受的载荷,实现机翼折叠状态时的收纳、弹射时的快速展开以及展开位置时的锁定。
折叠展开机构的工作原理如图4(a)所示。滑动轴的初始位置为1位置,此时机翼为折叠状态,并且由于压力角为90°,实现自锁。展开时,在外力推动下,滑动轴由1位置运动到2位置,推动转板Omnofg逆时针转动,实现解锁。运动至3位置时,与f'点相切,压力角又达到最大90°,继续运动至4位置,实现可靠自锁。对折叠展开机构进行了具体设计,三维模型如图4(b)所示,并制作了实物模型,期间针对发现的问题对设计进行了改进。
3 系统总成设计
Z字型小型多用途折叠翼无人机的总体结构如图5所示。由机身、动力系统、折叠展开机构、机翼、垂尾及控制系统等组成。发射过程为:在控制系统控制下,飞机被贮藏发射筒弹射出筒;延时0.5s,折叠展开机构1和2同时动作,带动机翼1由后向前、机翼2由前向后同时展开;再延时0.5s,折叠展开机构3和4同时动作,带动垂尾1和2由后向前同时;再延时0.5s,动力系统开始工作,进入正常飞行状态。最终所有设计内容均实现模型制作和试飞,多次试飞效果证明设计是成功的。
4 结论
(1)分析了“Z”字机的受力情况,确定从理论上这种非对称构型可以平稳飞行,进行了原理验证机的制作试飞,掌握了“Z”字机的一些飞行特性,证实了理论分析的正确性。
(2)设计了一款基于滑动摆杆机构的具有自锁功能的折叠展开机构,进行加工、试验,验证了设计的合理性。
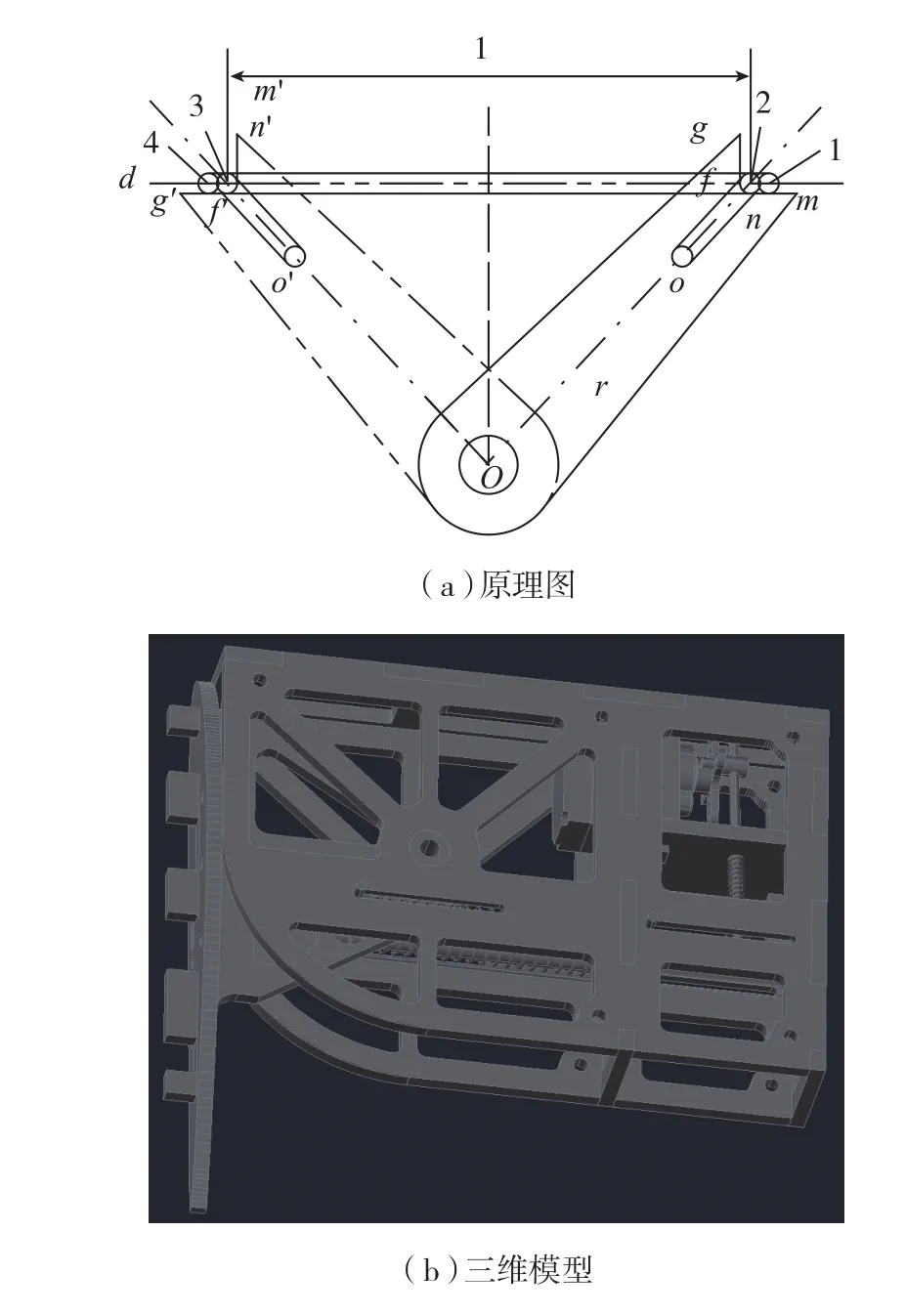
图4 折叠展开机构Fig.4 Folding-unfolding mechanism
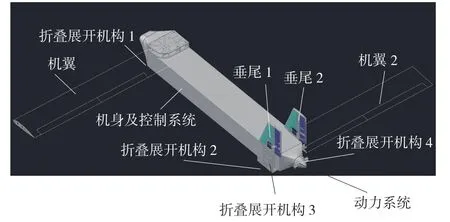
图5 Z字型折叠飞机结构Fig.5 Structure of the Z-shaped folding-wing UAV
[1]迟圣威, 赵永辉.可折叠机翼颤振分析[J].江苏航空,2010(S2):2-4.
CHI Shengwei, ZHAO Yonghui.Flutter analysis of the folding wing[J].Jiangsu Aviation, 2010(S2):2-4.
[2]LOVE M H, ZINK P S, STROUD R L, et al.Impact of actuation concepts on morphing aircraft structures[R].AIAA 2004-1724.2004.
[3]LIU Y, KAPANIA R K, GERN F H, et al.Equivalent plate modeling of arbitrary planform wings[C]//Proceedings of International Conference on Computational Engeineering and Sciences.Los Angeles,2000:21-25.
[4]GERN F H, INMAN D J, KAPANIA R K.Strctural and aeroelastic modeling of general planform UCAV wings with morphing airfoils[R].AIAA-2001-1369,2001.
[5]RAKESH K K, YOUHUA L.Static and vibration analyses of general wing structures using equivalent plate models[R].AIAA-2000-1434, 2000.
[6]JOSHI S P, TIDWELL Z, WILLIAM A C, et al.Comparison of morphing wing strategies based upon aircraft performance Impacts[C]//Proceedings of 45th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics & Materials Conference California,2004.
[7]李毅, 杨智春.翼飞行器机翼折叠过程的颤振仿真分析[J].系统仿真学报, 2009, 21(22):7069-7072.
LI Yi, YANG Zhichun.Simulation and flutter analysis of wing folding process of folding wing aircraft[J].Journal of System Simulation, 2009,21(22): 7069-7072.
[8]董文俊,孙秦.折叠翼变体飞机的传动机构设计和驱动方式优化分析[J].航空工程进展,2011,2(2): 84-88.
DONG Wenjun, SUN Qin.The transmission design and driving optimization of folding wing aircraft[J].Dvances in Aeronautical Science and Engineering, 2011,2(2): 84-88.
[9]张爱华, 秦武.以色列军用小型无人机发展概览[J].飞航导弹, 2010(2): 19-23.
ZHANG Aihua, QIN Wu.Review of American mini-UAVs[J].Aerodynamic Missiles Journal, 2010(2): 19-23.
[10]Proctor Sam.Aircraft with folding wings:GB2434783[P].2007-08-08.
[11]威廉·兰道尔·麦克唐奈.斜置翼身融合飞机:200880105018.0[P], 2008-08-29.
MCDONNELL W R.Canted Blended wing body (BWB)UAV:200880105018.0[P].2008-08-29.
猜你喜欢
家庭影院技术(2021年6期)2021-07-28
北京航空航天大学学报(2020年10期)2020-11-14
疯狂英语·新悦读(2019年9期)2019-09-21
能源(2017年5期)2017-07-06
制造业自动化(2017年2期)2017-03-20
中国科技信息(2016年15期)2016-11-04
中国卫生(2015年2期)2015-11-12
航空学报(2015年4期)2015-05-07
现代企业(2015年6期)2015-02-28
创业家(2015年1期)2015-02-27
