FMS系统的液压换向机械手的PLC控制*
2016-05-30 07:15:18米国际李祥阳
新技术新工艺 2016年4期
关键词:PLC控制
米国际,李祥阳
(1.陕西省泵类装备研究中心,陕西 西安 710077;2.西安航空学院,陕西 西安 710077)
FMS系统的液压换向机械手的PLC控制*
米国际1,2,李祥阳1,2
(1.陕西省泵类装备研究中心,陕西 西安 710077;2.西安航空学院,陕西 西安 710077)
摘要:首先介绍了PLC在FMS系统中液压换向机械手的应用,其次阐述了液压换向机械手的组成及控制流程。从PLC的控制原理角度,设计了液压换向机械手控制流程图、控制状态表、PLC的I/O接口及其地址分配。经试验验证,达到了预期效果。
关键词:FMS;液压换向机械手;PLC控制
目前,柔性制造系统(Flexible Manufacturing System,FMS)由主控计算机和相关软件进行控制和管理,进行工件的加工及搬运,进而实现多品种、变批量和混流方式生产的自动化制造。工业上柔性制造系统的控制功能主要由可编程逻辑控制器(Programmable Logic Controller,PLC)完成。本文的液压换向机械手是FMS系统的一个单元,通过液压换向回路实现对工件的盖章操作,完成对托盘进件、出件后再经90°旋转换向送至下一单元[1-3]。
1液压换向机械手的结构组成

图1 液压换向机械手的结构组成
液压换向机械手由压紧、前推和旋转等3个双作用液压缸构成。压紧缸驱动四连杆机构,实现刻章动作;前推缸驱动链条机构,实现本单元对托盘的进件和出件操作;旋转缸是由1个摆动缸带动整体液压单元进行90°换向[4-9]。其结构组成如图1所示,包括缸驱动四连杆机构、大液压缸、小液压缸和链条传送机构。
2液压换向机械手控制状态表设计
初始状态:液压单元的链条传动检测复位、转向检测复位和刻章检测复位状态,液压电磁断路失电。系统运行期间:1)托盘进入发出检测信号后,链条传动至位,电磁阀与液压磁路断路同时得电,链条带动托盘及工件进入本单元;2)链条传动到位后,链条传动至位,检测微动开关发出信号,此时链条传动至位,电磁阀与液压磁路断路同时失电,链条传动停止;3)托盘入位后,托盘至位检测微动开关发出信号,刻章至位,电磁阀与液压磁路断路同时得电,对托盘上的工件进行刻章动作;4)刻章至位检测微动开关有信号时,刻章至位,电磁阀失电停止动作,此时刻章复位,电磁阀得电,使刻章臂复位;5)刻章复位检测有信号时,该电磁阀失电结束动作,此时转向至位电磁阀得电,摆动液压缸带动液压单元整体进行90°旋转;6)当碰到转向至位检测的微动开关时,该电磁阀失电停止动作,此时链条传动复位电磁阀得电,将工件送出;7)链条传动复位检测到有信号时,该电磁阀与液压磁路断路同时失电;8)当托盘送出检测的光电开关发出检测信号时,表示托盘已经完全离开液压单元,此时转向复位,电磁阀与液压磁路断路同时得电,使液压单元复位;9)转向复位检测微动开关发出信号时,转向复位,电磁阀与液压磁路断路同时失电,系统回复初始状态。液压换向机械手控制状态表见表1。

表1 液压换向机械手控制状态表
3液压换向机械手I/O编号分配表
液压换向机械手I/O编号分配表见表2。
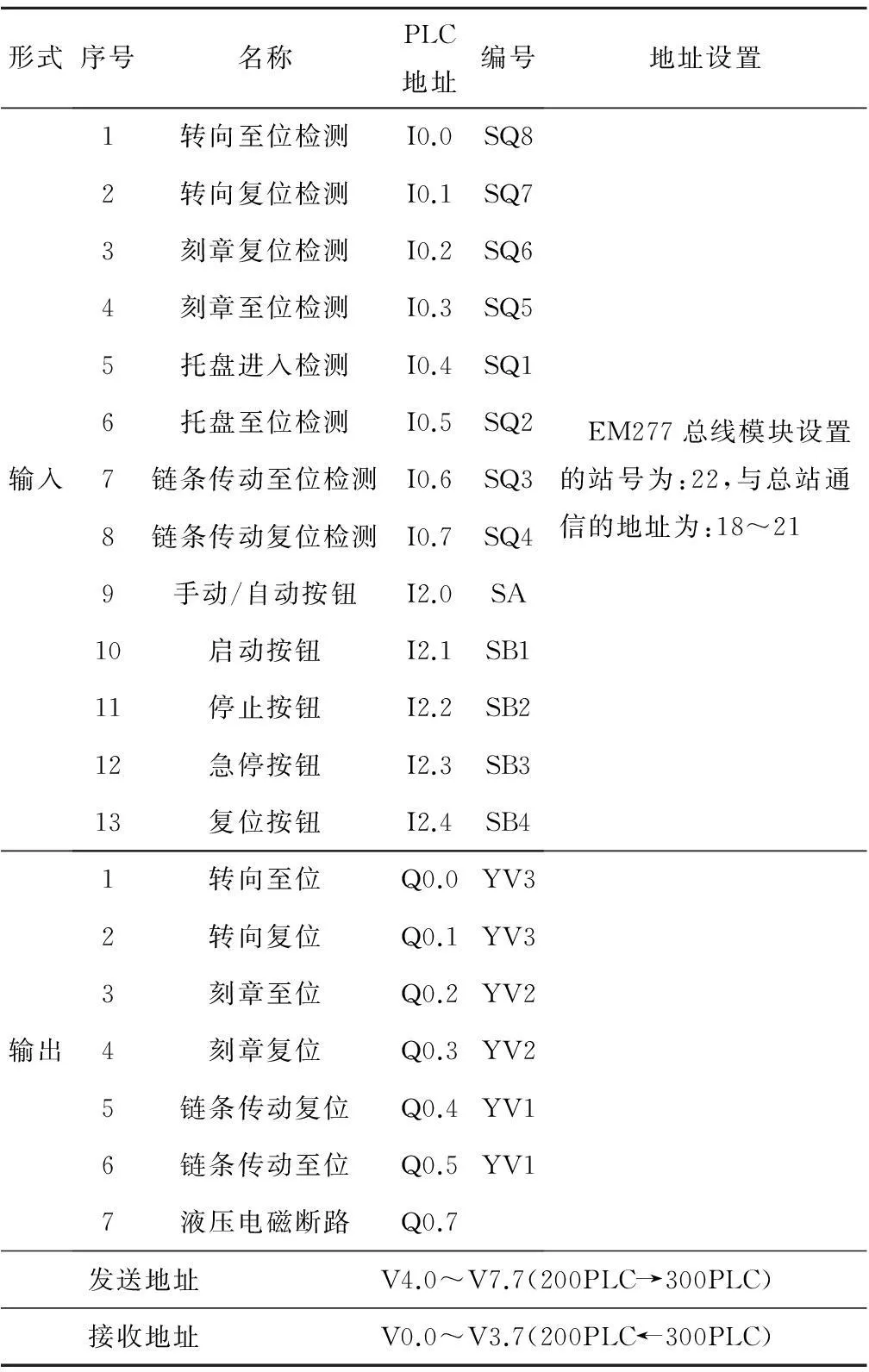
表2 液压换向机械手I/O编号分配表
4液压换向机械手程序流程图
液压换向机械手程序流程图如图2所示。
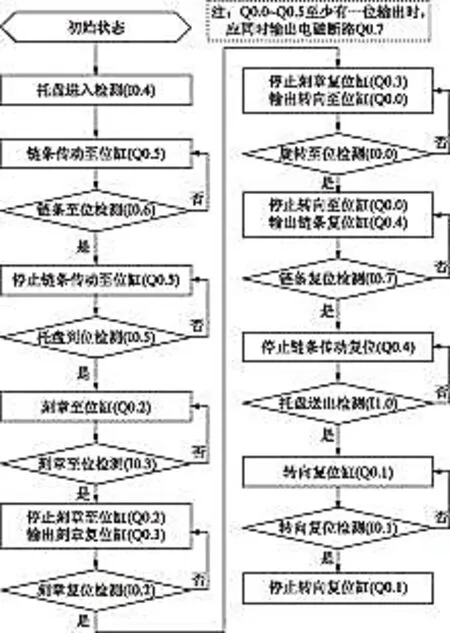
图2 液压换向机械手程序流程图
5结语
本文设计的液压换向机械手的PLC控制电路,可靠性高,抗干扰能力强。经试验验证,完全达到了实际控制要求,其控制方式值得推广应用。
参考文献
[1] 蔡晓霞. 基于PLC的污水处理控制系统的研究[D]. 杭州:浙江工业大学,2010.
[2] 黄金梭,陈开强. 基于VB的工业机器人PLC控制系统[J]. 轻工机械,2010(3):65-68.
[3] 游国栋. 基于PLC控制的3.3kV移动变电站测控系统的研究[D]. 太原:太原理工大学,2005.
[4] 杜书娟. 基于PLC的磁流变抛光机的控制研究[D]. 西安:西安工业大学,2008.
[5] 孟雷. 基于PLC的电梯模型控制系统及组态监控设计[D]. 苏州:苏州大学,2010.
[6] 靳一. 基于PLC的视觉识别装配存储系统设计[D]. 保定:河北大学,2013.
[7] 李子昀. 基于PLC的自动生产线实验平台的研究[D]. 长沙:中南大学,2010.
[8] 高凌云. 基于PLC的气动自动生产线的研究[D]. 成都:西南石油大学,2011.
[9] 李德英. 基于PLC的液压实验台监控系统的开发与研制[D]. 长沙:中南大学 2010.
* 2013年度科技部创新基金项目(13C26216105730)
2015年陕西省自然基金项目(2014JM2-5069)
2014年技术转移促进工程-产学研合作重大项目(CXY1424)
责任编辑郑练
The PLC Control of Hydraulic Commutation Manipulator in FMS System
MI Guoji1,2, LI Xiangyang1,2
(1. Pump Equipment Engineering Research Center of Shaanxi Province, Xi’an 710077, China; 2. Xi’an Aeronautical College, Xi’an 710077, China)
Abstract:Firstly, introduce the PLC hydraulic system in FMS commutation robotic applications, then present the elaborate hydraulic commutation robot composition and control processes. From the perspective of PLC control principle, design the hydraulic commutation robot control flow, control state table, PLC’s I/O interface, and their address allocation. The experiment is done to achieve the desired effect.
Key words:FMS, hydraulic commutation manipulator, PLC control.
中图分类号:TP 399
文献标志码:A
收稿日期:2015-11-03
作者简介:米国际(1965-),男,副教授,主要从事机电控制等方面的研究。
猜你喜欢
科技与创新(2017年1期)2017-02-16 19:27:55
山东工业技术(2016年24期)2017-01-12 08:40:44
建筑建材装饰(2016年11期)2016-12-29 19:13:49
科技创新与应用(2016年34期)2016-12-23 18:52:54
科学与财富(2016年18期)2016-12-22 17:51:16
电子技术与软件工程(2016年19期)2016-12-19 18:49:35
数字技术与应用(2016年9期)2016-11-09 22:09:07
中国科技博览(2016年15期)2016-08-23 01:23:13
科技视界(2016年14期)2016-06-08 19:01:12
无线互联科技(2015年11期)2016-03-04 00:30:48