
基于缓冲算法的无人机电力线倾斜摄影航迹规划研究
2016-05-28 07:51董选昌曲烽瑞张耿斌李陆林杨成城
无线互联科技 2016年6期
董选昌 曲烽瑞 张耿斌 李陆林 杨成城
摘 要:针对电力走廊进行巡视或倾斜摄影数据采集,需要离电力线保持一种安全侧向距离和高度,进行按航迹沿线自主飞行和反航,航迹的规划影响了数据覆盖的范围,决定了数据采集质量的好坏。文章基于缓冲算法和倾斜摄影的特点,提出一种新的航迹规划方案,以保证单架次单相机倾斜摄影的数据能满足电力杆塔和电力导线的数据采集任务。
关键词:倾斜摄影;三维建模
由于倾斜影像为用户提供了更丰富的地理信息、更友好的用户体验,该技术在欧美等发达国家已经广泛应用于应急指挥、国土安全、城市管理、房产税收等行业。但针对电力行业应用的倾斜摄影仍然存在的各种不足[1],本文针对电力线进行倾斜摄影数据采集,设置规范的航拍路径,确保一个架次往返飞行即可全覆盖完成数据采集任务。
1 关键技术与流程
实现输电线路的数据采集,其流程如图1所示。
1.1 电力线缓冲算法
基于折线进行缓冲区的算法比较多,本文借鉴传统的缓冲区常用算法[2 -3],和传统的双线圆弧算法相同,在凸侧加入圆弧,在凹侧加入线段,同时记录线段/弧段的前进方向,按顺/逆时针顺序最终生成一个线段/弧段混合数组,生成的初始缓冲区边界如图2所示。
交点的计算是整个缓冲区算法中最为耗时的操作。经过求交运算计算出来的交点有些可能位于整个缓冲区的内部,需要予以剔除。经过计算交点并剔除在缓冲区内部的交点后。剩下的交点均位于缓冲区的边界上,为最终缓冲区上的点。此时构造缓冲区的策略借鉴采用两多边形求并的双线算法。即从交点集合中选择一点,沿着前进方向跟踪,遇到交点则跳转到交点所在的另外一个单元上,如此重复,直到回到该交点[4]。
1.2 相机参数分析
相机的参数决定了航迹的高度范围,当相机足够高的时候能覆盖杆塔,但测量的精度又达不到应用的需求,如果相机离杆塔太近又会不满足覆盖线路走廊的条件,本文以RX1相机的参数为例子,其他相机参数可以以表1-2类推,根据需要的测绘精度,确定最佳的飞行高度。
RX1相机参数分析如下,航测可根据倾斜摄影测量的需要,从表1-2的分析中找到最佳的航拍航迹高度。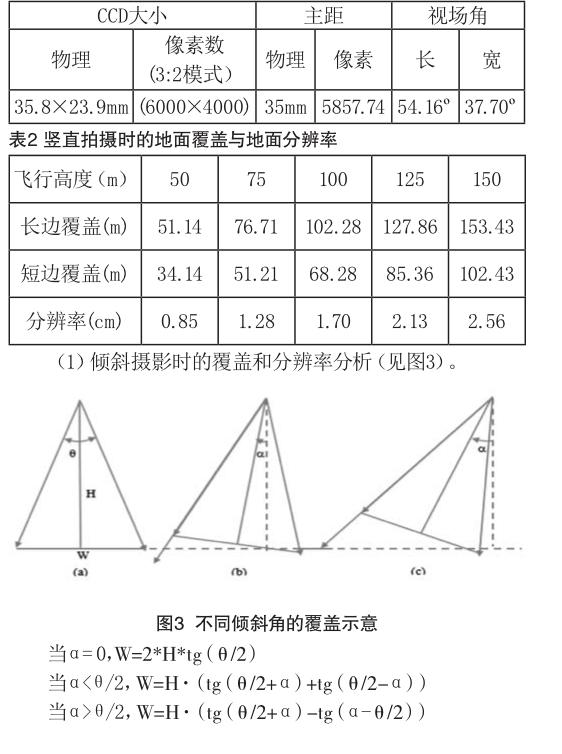
(2)覆盖宽度的分析(见表3)。
(3)安全距离下不同飞行高度的倾斜角。
考虑500kv线路的安全距离(5m)和飞行不确定性(30m),即飞行旁向距离为35m,对不同飞行高度的倾斜角计算如表4所示。
根据dW=H·tg(dα)计算不同姿态变化下的侧摆位移,如表5所示。
故:相机倾斜角按15°设计,当姿态变化为8°时,覆盖降低到87m左右,中心偏移18m,有效覆盖范围为:87-18=69m,旁向重叠:69/75=92%。
2 实验分析
以广东某线路为例进行试验飞行,采用零度的飞控控制的多悬翼无人机进行起飞降落,进行自主航迹飞行试验。三维平台上面,黄色的轨迹为规划的实际的三维路线,黑色的轨迹为差分GPS处理后的轨迹信息。差分的高程比实际的高程高出10m左右,其他水平位置误差基本可忽略。规划轨迹如图4所示,通过实拍的照片如图5所示,照片位于相机的中心附近,说明该三维航线设计能满足巡线的需求,减少飞控手人为的误操作,实现傻瓜式自主飞行巡线和数据采集任务。
3 结语
本文利用折线缓冲区分析方法,通过相机参数设置,完整地生成了无人机三维航迹,确保巡视杆塔出现在相机的中心部位,很好地满足了电力生产的维护的应用。
[参考文献]
[1]毋河海.关于GIS缓冲区的建立问题[J].武汉测绘科技大学学报,1997(4):358-366.
[2]吕杏儿,黄杏元.基于GIS的缓冲区生成模型理论和方法[J].科技通报,2000(5): 12-14.
[3]王亮.GeoWindows中缓冲区生成的算法[J].遥感信息,1998(Z1):26-29.
[4]郭达志,盛业华.地理信息系统原理与应用[M].徐州:中国矿业大学出版社,2002.
Research on UAV Route Planning for the Inclined Photography Collection Based on Buffer Algorithm
Dong Xuanchang1, Qu Fengrui1, Zhang Gengbin1, Li Lulin1, Yang Chengcheng2(1.Guangzhou Power Supply Bureau, Guangzhou 510315, China; 2.Wuhan Huzoho Technology Co., Ltd., Wuhan 430079, China)
Abstract: Inspections are carried out for the power corridors or tilt photography data acquisition, from power lines need to maintain a safe lateral distance and height, carried along by the track and anti-aircraft autonomous flight, trajectory planning affect the scope of data coverage, determines the data collection quality is good or bad. Based buffer algorithm and tilt photography, this paper proposes a new path planning programs to ensure that a single sortie single camera tilt photography data to meet the electricity tower and power conductor data acquisition tasks.
Key words: oblique photography; 3D modeling
猜你喜欢
河北理科教学研究(2020年2期)2020-09-11
电子测试(2018年14期)2018-09-26
水利规划与设计(2017年11期)2017-12-23
电子制作(2017年14期)2017-12-18
北京航空航天大学学报(2017年1期)2017-11-24
电信科学(2016年11期)2016-11-23
项目管理技术(2015年3期)2015-04-23
电测与仪表(2014年13期)2014-04-04
电测与仪表(2014年20期)2014-04-04
计算机工程与设计(2012年3期)2012-07-25
