FS-SEA柔性臂改进的反馈计算力矩控制方法
2016-05-24 07:49李洪谊
载人航天 2016年2期
陈 鹏,李洪谊
(1.中国科学院沈阳自动化研究所机器人学国家重点实验室,沈阳110016;2.中国科学院大学,北京100049;3.沈阳通用机器人技术股份有限公司,沈阳110000)
FS-SEA柔性臂改进的反馈计算力矩控制方法
陈 鹏1,2,李洪谊1,3
(1.中国科学院沈阳自动化研究所机器人学国家重点实验室,沈阳110016;2.中国科学院大学,北京100049;3.沈阳通用机器人技术股份有限公司,沈阳110000)
摘要:对于基于FS-SEA(力源串联弹性驱动器)的柔性关节机械臂,当其动力学模型已知时,反馈计算力矩法是一种非常直观的控制方法。但是对于一个动力学参数难以精确确定,并且可能受到冲击扰动的系统来说,传统的反馈计算力矩法难以进行稳定地控制。在传统的反馈计算力矩法基础上,提出了一种改进的控制方法。通过在控制律中引入自适应补偿项,保证了控制系统在机械臂动力学参数或所受外力无法精确估计情况下的渐近稳定性;通过在系统的加速度指令之后引入低通滤波环节,大幅度增强了控制系统抵抗外部冲击的能力。仿真实验证明,利用改进的反馈计算力矩法对FS-SEA柔性机械臂进行控制,不仅能够保证系统稳定性,实现高精度轨迹跟踪,而且使控制系统具有很强的抗冲击能力。
关键词:柔性机械臂;SEA;计算力矩法;改进;自适应补偿;渐进稳定性;低通滤波;抗冲击
1 引言
在考虑与环境或人频繁交互的应用场合时,柔性机械臂具有传统刚性机械臂无法比拟的优势。相比于刚性机械臂,柔性机械臂具有力控制平稳精确、抗冲击能力强、具有储能能力的特点,因此展现出非常强的交互能力[1]。在机械臂与人进行交互时,安全性是最为重要的前提条件。安全性前提要求机械臂不是仅在受控的稳定带宽下,而是在所有频率下都体现低阻抗特性[2]。柔性机械臂能够在全频域上实现低阻抗特性,为机械臂与人的交互提供了本质安全保障。
串联弹性驱动器(SEA)作为一种有效的柔性机械臂实现方案,通过在机械臂的驱动关节中串联弹性元件,使关节的柔性显著增加。Pratt和Williamson于1995年首次提出了SEA的概念,并对其特性和控制方法开展了研究[3]。SEA按控制方式主要可以分为力源(FS-SEA)和速度源(VS-SEA)两类。目前,对于这两种SEA都已经有了一定程度的研究。Sensinger和Weir对SEA非约束阻抗控制下模拟不同的刚度特性的能力进行了研究[4];Hurst等基于SEA研制了一种用于双足跑步的可变柔性驱动系统[5];Ragonesi等研发了一种由SEA驱动的用于康复训练的上肢外骨骼,并对其控制方法和性能进行了研究[6];Thorson和Caldwell研制了一种应用于高动态任务的非线性旋转SEA,可以应用在机器人的跑、跳等任务中[7]。以上是FS-SEA相关的一些有代表性的研究工作。如果在驱动电机上加入一个高频的速度内环或者位置内环,并将电机视为速度源[2, 8],此时的SEA即属于VS-SEA。关于VSSEA的一些有代表性的研究工作有:Vallery等在无源性前提下,使用带有快速速度内环的串级控制方式,对SEA的输出力矩精确控制问题进行研究[8];Wyeth通过一种自行设计的SEA,对VSSEA控制模式进行了深入研究,其中包括控制算法设计、速度饱和效应以及在饱和效应下的轨迹生成问题[9-10]。VS-SEA的主要问题是驱动电机不可以无条件地视为理想速度源,即存在速度饱和效应。虽然VS-SEA的模型比FS-SEA更简单,但是在速度饱和效应下的轨迹生成却是一个很复杂的问题。另一方面,双闭环的控制结构也增加了控制的复杂性。所以,本文在SEA的控制方法上采用FS-SEA。
纵观SEA的相关研究,对于单个SEA关节的特性以及控制方法的研究较多,而对于SEA柔性机械臂的整臂控制方法的研究却是非常少的。目前,基于SEA的柔性机械臂的成功研究案例并不多见,有相关文献报道的只有德国的DLR手臂系统[11],以及美国NASA的Robonaut 2[1]和Valkyrie[12]。DLR手臂系统的研究工作中,对于SEA柔性机械臂的整臂控制方法有所研究,通过MIMO系统解耦变换对柔性臂进行控制。但是经过研究发现,其控制方法并没有达到很好的效果。对于NASA所进行的相关研究工作,并没有对SEA柔性机械臂的整臂控制方法在文献中进行报道。对于基于FS-SEA的柔性机械臂,当已经建立了它的动力学模型时[13],反馈计算力矩法是一种非常直观的控制方法。只是对于一个动力学参数难以精确确定,并且可能受到冲击扰动的系统来说,传统的反馈计算力矩法难以进行稳定地控制。本文将在传统的反馈计算力矩法基础上,提出一种改进的控制方法。利用这种方法控制FS-SEA柔性机械臂,能够保证系统稳定性,实现高精度轨迹跟踪,并使系统具有很强的抗冲击能力。
2 传统的反馈计算力矩法
反馈计算力矩法用来对动力学模型已知的系统进行轨迹跟踪控制[14-17]。本文研究的被控对象为基于FS-SEA的n自由度串联柔性关节机械臂,其结构示意图如图1所示。利用传统的反馈计算力矩法对其进行控制的框图如图2所示。其中,θd、、分别表示期望运动的关节角位置、速度、加速度,θ、分别表示机械臂系统实际输出的关节角位置和速度,τ表示关节电机输出的驱动力矩, f表示作用于机械臂系统的外部力。
FS-SEA柔性机械臂的动力学模型可以标准化为式(1)所示的形式:

其中, T表示柔性关节的输出力矩,也是SEA的输出力矩;TB2表示关节传动机构的阻尼力矩;Tdyna表示关节转子的惯性力矩;μ表示机械臂的关节减速比矩阵,它是一个对角矩阵,前面的负号表示谐波传动具有的反向效应,τ表示机械臂关节电机的输出转矩。
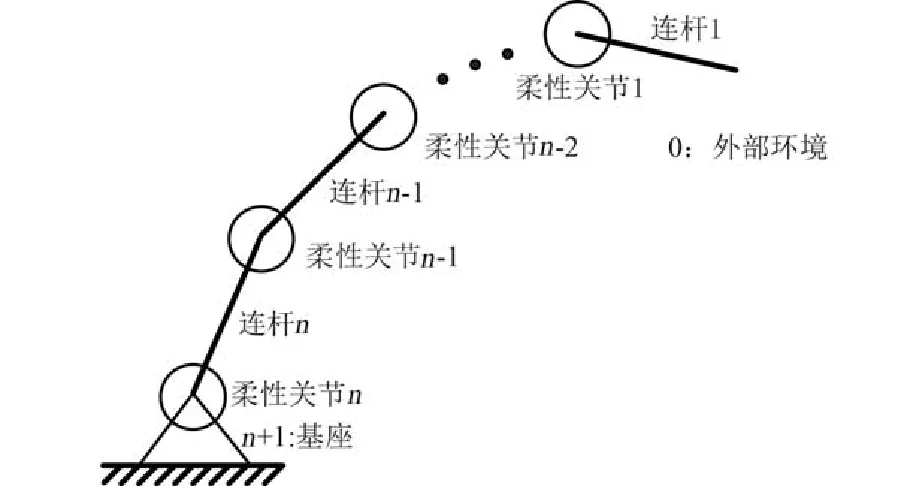
图1 基于FS-SEA的n自由度串联柔性关节机械臂结构示意图Fig.1 The schema of a series flexible-joint manipulator with n DoFs based on FS-SEA
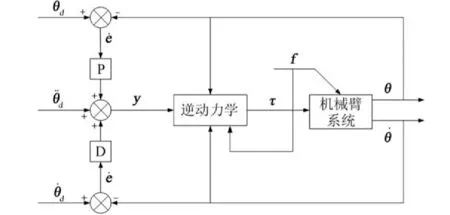
图2 FS-SEA柔性机械臂的传统反馈计算力矩法控制框图Fig.2 The block diagram of traditional feedback computed torque method for FS-SEA flexible manipulators
那么,在图2所示的控制律下,系统(1)将有如式(2)所示的表现形式:
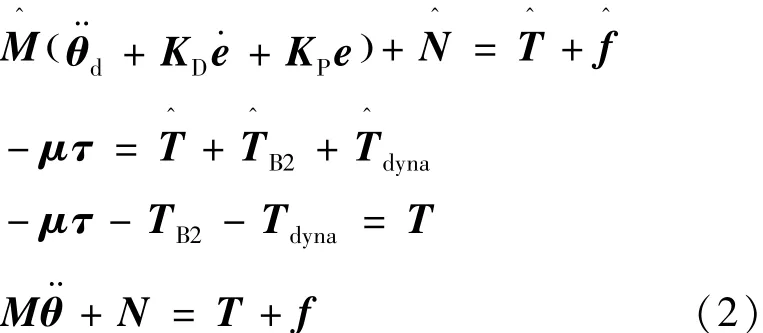
当柔性机械臂系统的所有动力学参数都可以精确确定,即u→O时,可以保证系统的渐近稳定性。但是,系统的动力学参数是难以精确确定的。所以传统的反馈计算力矩法在控制FS-SEA柔性机械臂时无法保证系统的稳定性,需要对其进行改进。
3 自适应补偿
为了使控制系统能够适用于机械臂动力学参数或所受外力无法精确估计的情况,在图2所示的控制律中加入一个式(4)所示的额外补偿项w:

此时控制系统的描述变为式(5):

将系统描述变换为式(6)所示状态空间形式:

设系统的Lyapnov函数如式(7):

则求导可得式(8):
系统的渐近稳定条件为式(9):

设式(10)、(11):

并且将补偿项w取为如式(12)所示形式:

其中ρ为可变增益。则系统渐近稳定条件变为式(13):

可以得到如式(14)所示关系式:

则系统的渐近稳定条件可以转化为如式(15)所示形式:

从(15)可以得出可变增益ρ的取值范围如式(16):
其中Δ=(XTQX)2+4‖z‖2(‖a+w‖2- ‖a‖2)。这里补偿项w的存在实际上相当于增大了反馈增益KP和KD。因为FS-SEA柔性机械臂控制系统实际上是一个离散系统,过大的反馈增益容易造成系统振荡,不利于系统的稳定。所以,按照如式(17)所示的自适应规则对可变增益ρ取值:

其中,ρmin表示(16)中的ρ的取值范围下限,ε表示一个足够小的正实数。这样, w就成为了一个自适应补偿项,通过它可以使FS-SEA柔性机械臂控制系统在动力学参数以及所受外力均无法精确估计的情况下仍然保持渐近稳定。
FS-SEA柔性机械臂的带有自适应补偿的反馈计算力矩法控制系统框图如图3所示。
4 对加速度指令滤波
4.1 自激振荡现象
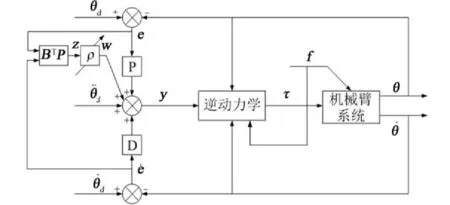
图3 FS-SEA柔性机械臂的带有自适应补偿的反馈计算力矩法控制框图Fig.3 The block diagram of the feedback computed torque method with adaptive compensation for FS-SEA flexible manipulators
由于n自由度FS-SEA柔性关节机械臂的各个关节之间是存在耦合效应的,所以当机械臂受到外部冲击时,有可能会发生自激振荡现象。经过研究发现,机械臂反馈控制系统的自激振荡频率与机械臂的动力学参数、机械臂的关节角位置以及控制系统的反馈增益相关。对于一个确定的FS-SEA柔性机械臂,当使用确定的反馈控制律对其进行控制时,可以让机械臂处于一些典型的关节角位置组合,并给机械臂一个外部冲击;如果FS-SEA柔性机械臂的正动力学模型可解[13],就可以利用仿真方法对机械臂反馈控制系统的自激振荡情况进行研究。
图4 3自由度FS-SEA柔性机械臂结构示意图Fig.4 The schema of the 3-DoF FS-SEA flexible manipulator
可以看到,以上4种情况中,FS-SEA柔性机械臂控制系统都产生了自激振荡。这说明前文提出的带有自适应补偿的反馈计算力矩法的抗冲击能力比较弱,下面将针对这一点对控制方法进行进一步改进。
4.2 低通滤波
从图5~8中可以发现,4种典型位置处的自激振荡频率是相似的,振荡的基频都在3~5 Hz之间。机械臂关节角位置不同,将会引起柔性关节所带负载的惯量改变。图5~8说明这种负载惯量的改变对于控制系统自激振荡频率的影响是被弱化的。因而对于FS-SEA柔性机械臂的其他位置,也具有相似的自激振荡频率。一条确定的FS-SEA柔性机械臂处于不同的关节角位置时其自激振荡的基频位于一个比较小的频率区间内这个事实说明,可以使用滤波的方法来提高机械臂控制系统的抗冲击能力。注意到柔性机械臂一般处在相对慢速的运动状态中,其运动指令的频率通常较低,所以使用对图3中的加速度指令y进行低通滤波的方法,对带有自适应补偿的反馈计算力矩法进行改进。使运动指令的基频位于低通滤波器的通带内,最大程度地保留指令信号;使自激振荡的基频位于低通滤波器的阻带内,尽量削弱对系统自激振荡的激励。
改进后的控制系统框图如图9所示。这是本文提出的利用改进的反馈计算力矩法控制FS-SEA柔性机械臂的控制系统最终改进结果。按照图9的方法对FS-SEA柔性机械臂进行控制,不仅能够实现高精度的轨迹跟踪,而且对机械臂动力学参数估计误差、机械臂所受外力估计误差以及机械臂受到的外部冲击都有很强的抑制作用。

图5 机械臂位于(5°,5°,0°),受到基坐标系下(-100 N,-100 N,0 N)的外部冲击时的仿真结果Fig.5 The simulation result when the manipulator is located at(5°,5°,0°)and suffers an external impact(-100 N,-100 N,0 N)in the base coordinate system
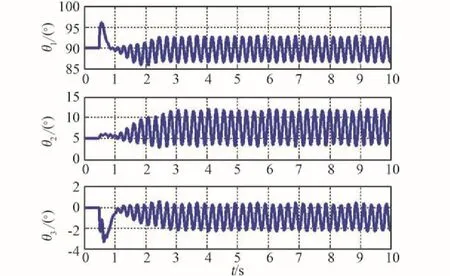
图6 机械臂位于(90°,5°,0°),受到基坐标系下(0 N,-250 N,-250 N)的外部冲击时的仿真结果Fig.6 The simulation result when the manipulator is located at(90°,5°,0°)and suffers an external impact(0 N,-250 N,-250 N)in the base coordinate system
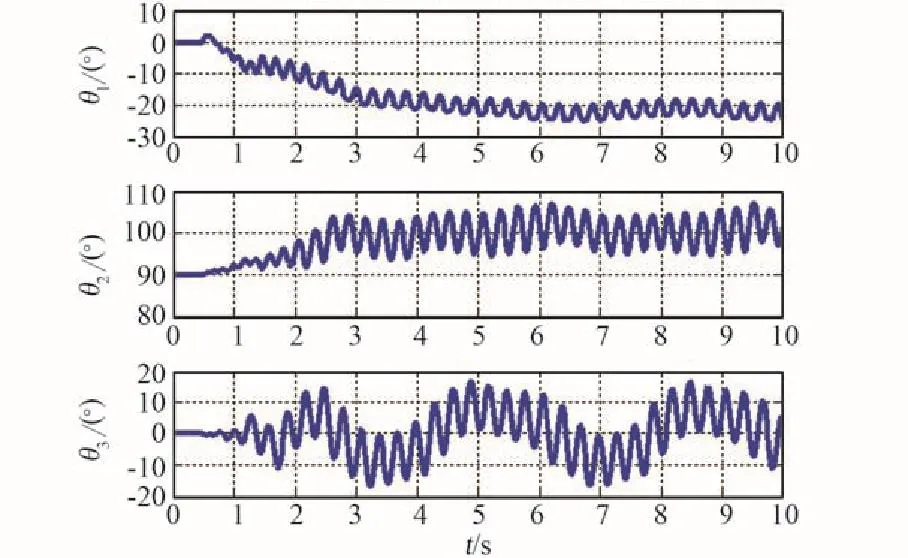
图7 机械臂位于(0°,90°,0°),受到基坐标系下(0 N,-100 N,-100 N)的外部冲击时的仿真结果Fig.7 The simulation result when the manipulator is located at(0°,90°,0°)and suffers an external impact(0 N,-100 N,-100 N)in the base coordinate system
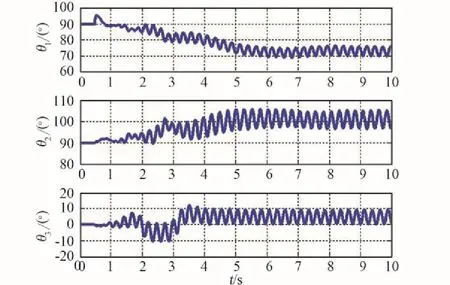
图8 机械臂位于(90°,90°,0°),受到基坐标系下(-250 N,-250 N,0 N)的外部冲击时的仿真结果Fig.8 The simulation result when the manipulator is located at(90°,90°,0°)and suffers an external impact(-250 N,-250 N,0 N)in the base coordinate system
5 仿真实验
利用图4所示的3自由度FS-SEA柔性机械臂对本文提出的改进的反馈计算力矩法进行仿真验证。图10所示为机械臂的运动指令曲线。在机械臂不受外力,动力学参数估计准确的情况下,其跟踪误差如图11所示。
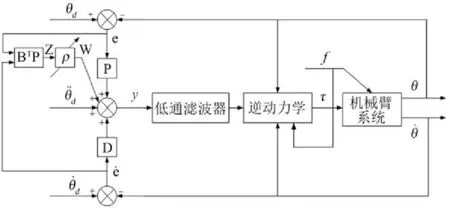
图9 FS-SEA柔性机械臂的带有自适应补偿和低通滤波的反馈计算力矩法控制框图Fig.9 The block diagram of the feedback computed torque method with adaptive compensation and low-pass filter for FS-SEA flexible manipulators
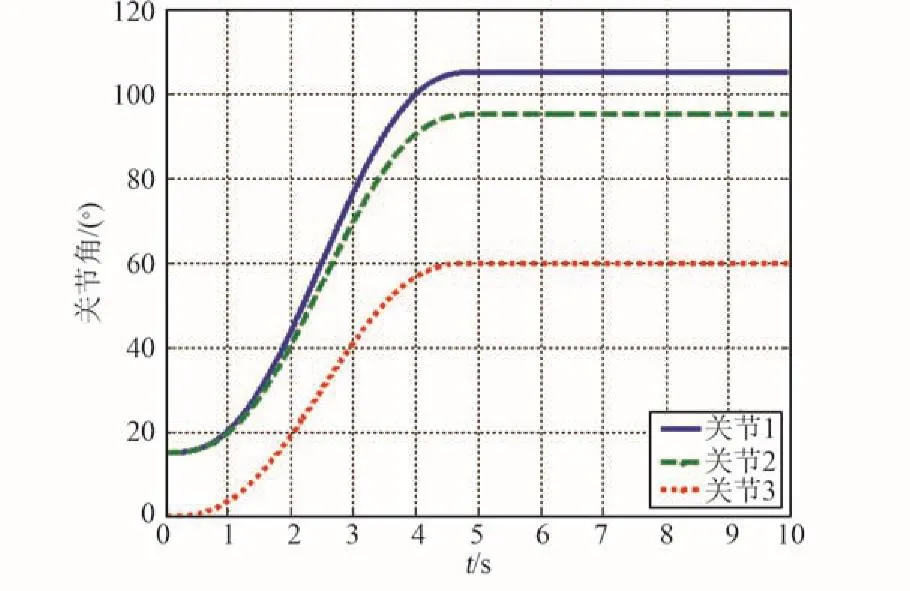
图10 FS-SEA柔性机械臂的运动指令曲线Fig.10 The motion command curves of the FS-SEA flexible manipulator
从图11中可以看到,在机械臂运动阶段各关节角产生了小幅的跟踪误差,这主要是因为在柔性关节机械臂中关节电机的输出力矩受到严格的限幅的缘故;在机械臂静止阶段各关节角的跟踪误差迅速减小并稳定在0,表明了本文提出的控制方法具有高精度的轨迹跟踪能力。
图12所示为机械臂动力学参数不准确的情况下,控制系统的跟踪误差。此处假设机械臂的连杆部分动力学参数有±10%的随机误差,转子部分动力学参数有±50%的随机误差。在正常情况下,系统动力学参数的估计误差要远小于上述假设。从图12中可以看到,机械臂动力学参数误差对于控制系统的跟踪精度有一定的影响,但是跟踪误差仍然维持在很小的程度上。跟踪误差无法归零是因为在实际的离散控制系统中,不可以让可变增益ρ无限增大而对其设置了上限的原因。在实际系统中,动力学参数更加准确时,控制系统的跟踪误差也会进一步减小。因此,利用本文提出的方法对FS-SEA柔性机械臂进行控制时,动力学参数估计误差不会对控制效果产生不良影响。
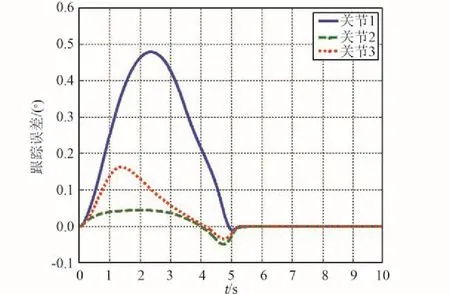
图11 机械臂不受外力,动力学参数估计准确时的跟踪误差Fig.11 The tracking errors with no external force and accurate dynamic parameter estimation
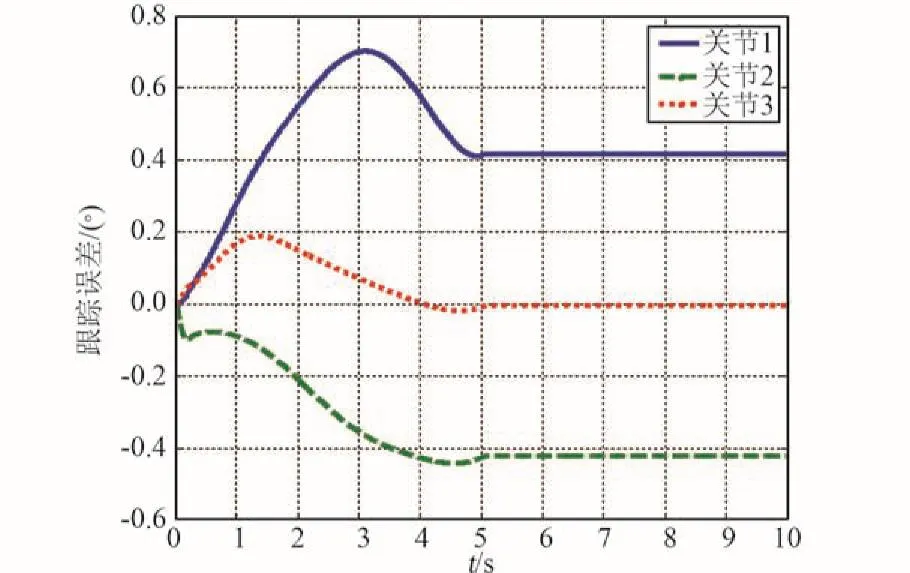
图12 机械臂动力学参数不准确时的跟踪误差Fig.12 The tracking errors with inaccurate estimation of the manipulator’s dynamic parameters
图13所示为柔性机械臂关节电机存在内部力矩扰动的情况下,控制系统的跟踪误差。这里假设关节电机的力矩输出有20%的随机误差。从图中可以看出,机械臂各关节的跟踪误差只是略有增大。这说明关节电机的内部力矩扰动对于本文提出方法的控制精度的影响是非常小的。
图14所示为机械臂在运动过程中,其末端受到竖直向下的大小为20 N的外力的持续作用时,控制系统的跟踪误差。假设在整个过程中,控制系统的外部扰动观测器始终没有观测到外力的作用,即对机械臂所受外力的估计是存在很大误差的。从图14中可以看到,系统的跟踪误差只在最初的极短时间内有明显增大,之后就一直维持在很小的程度上,并最终稳定在0。这说明本文提出的控制方法对于机械臂所受外力的估计误差有非常强的抑制作用。
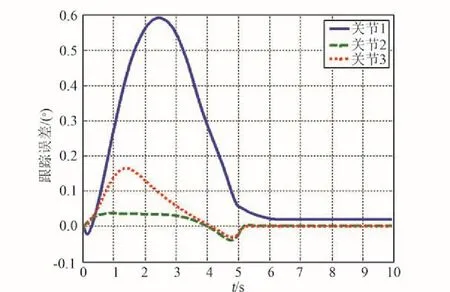
图13 关节电机存在内部力矩扰动时的跟踪误差Fig.13 The tracking errors when there exist internal torque disturbances in the joint motors
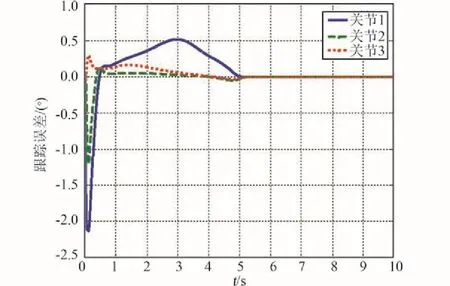
图14 机械臂所受外力估计不准确时的跟踪误差Fig.14 The tracking errors with inaccurate estimation of the external force suffered by the manipulator
最后,对本文提出的FS-SEA柔性机械臂控制系统的抗冲击能力进行仿真验证。机械臂的运动指令曲线仍然如图10所示。在t=2 s时,对机械臂末端施加一个基坐标系下(-1800 N-1800 N-1800 N)的外部冲击。机械臂各关节的实际运动轨迹如图15所示,机械臂的轨迹跟踪误差如图16所示。从图中可以看出,机械臂在受到大冲击之后,其关节输出运动经历短时间的振荡就可以再次跟踪上运动指令。轨迹跟踪误差能够快速收敛,并且最终稳定在0。可见柔性机械臂的控制系统中加入了低通滤波环节之后有了很强的抵抗外部冲击的能力。
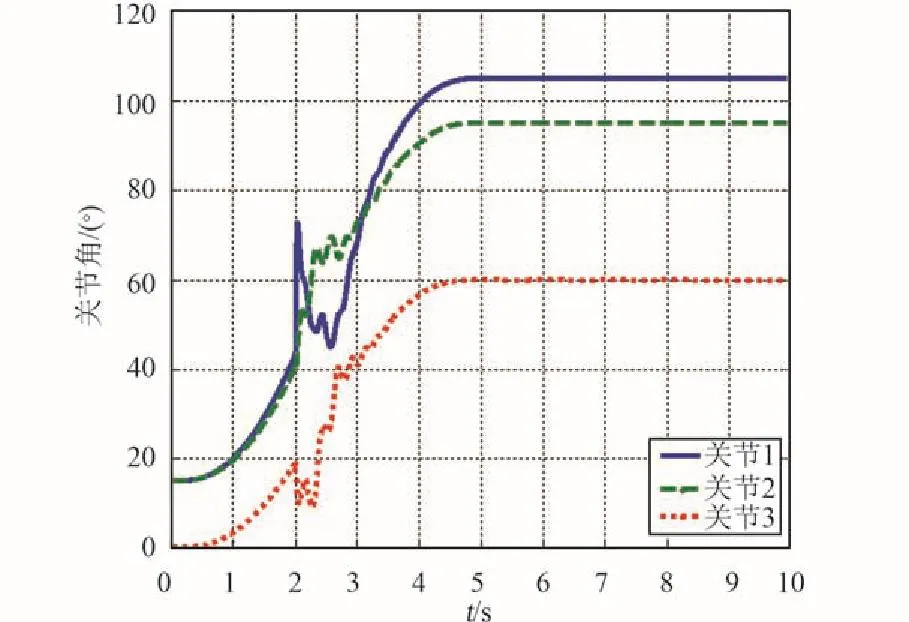
图15 对机械臂末端施加基坐标系下(-1800 N,-1800 N,-1800 N)的外部冲击时,机械臂各关节的实际运动轨迹Fig.15 The actual trajectories of the manipulator′s joints when the manipulator′s end suffers an external impact of(-1800 N,-1800 N,-1800 N)in the base coordinate system
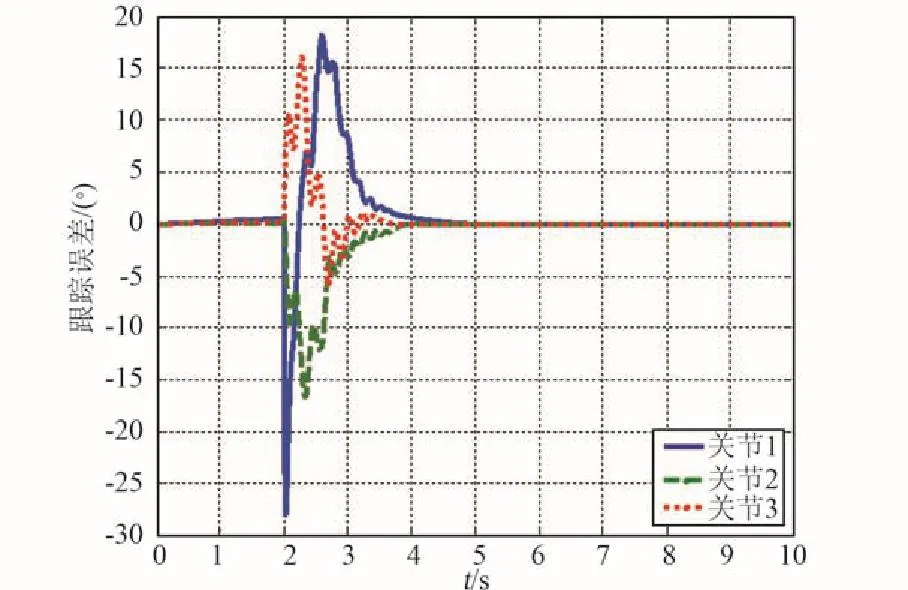
图16 对机械臂末端施加基坐标系下(-1800 N,-1800 N,-1800 N)的外部冲击时,机械臂的轨迹跟踪误差Fig.16 The tracking errors of the manipulator when the manipulator′s end suffers an external impact of(-1800 N,-1800 N,-1800 N)in the base coordinate system
6 结论
本文针对基于FS-SEA的柔性关节机械臂的控制问题开展研究。对于基于FS-SEA的柔性机械臂,当其动力学模型已知时,反馈计算力矩法是一种非常直观的控制方法。但是对于一个动力学参数难以精确确定,并且可能受到冲击扰动的系统来说,传统的反馈计算力矩法难以进行稳定地控制。本文在传统的反馈计算力矩法基础上,提出了一种改进的控制方法。通过在控制律中引入自适应补偿项,保证了控制系统在机械臂动力学参数或所受外力无法精确估计的情况下的渐近稳定性;通过在系统的加速度指令之后引入低通滤波环节,大幅度增强了控制系统抵抗外部冲击的能力。改进后的反馈计算力矩法的控制系统框图如图9所示。通过以上对于反馈计算力矩法的改进,使其成为了一种对于FS-SEA柔性机械臂具有很强实用性的控制方法。通过大量的仿真实验可以证明,利用本文提出的控制方法对FS-SEA柔性机械臂进行控制,可以在各种不利情况下保证系统的稳定性,实现高精度的轨迹跟踪,并且该控制系统还具有很强的抵抗外部冲击的能力。
参考文献(References)
[1] Diftler M A, Mehling J S, Abdallah M E, et al.Robonaut 2-the first humanoid robot in space[C]/ / Robotics and Automation(ICRA), 2011 IEEE International Conference on.Shanghai, PEOPLES R CHINA:IEEE, 2011:2178-2183.
[2] Sensinger J W, Weir R F.Improvements to series elastic actuators[C]/ / Mechatronic and Embedded Systems and Applications, Proceedings of the 2nd IEEE/ ASME International Conference on.Beijing, PEOPLES R CHINA:IEEE, 2006:160- 166.
[3] Pratt G A, Williamson M M.Series elastic actuators[C]/ / 1995 IEEE / RSJ International Conference on Intelligent Robots and Systems - Human Robot Interaction and Cooperative Robots.Pittsburgh, PA:IEEE, 1995:399-406.
[4] Sensinger J W, Weir R F.Unconstrained impedance control using a compact series elastic actuator[C]/ / Mechatronic and Embedded Systems and Applications, Proceedings of the 2nd IEEE/ ASME International Conference on.Beijing, PEOPLES R CHINA:IEEE, 2006:167-172.
[5] Hurst J W, Chestnutt J E, Rizzi A A.The actuator with mechanically adjustable series compliance[J].IEEE Transactions on Robotics, 2010, 26(4):597-606.
[6] Ragonesi D, Agrawal S, Sample W, et al.Series elastic actuator control of a powered exoskeleton[C]/ /33rd Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBS).Boston, MA:IEEE, 2011:3515-3518.
[7] Thorson Ivar, Caldwell D.A nonlinear series elastic actuator for highly dynamic motions[C]/ / Intelligent Robots and Systems (IROS), 2011 IEEE/ RSJ International Conference on.San Francisco, CA:IEEE, 2011:390-394.
[8] Vallery H, Ekkelenkamp R, van der Kooij H, et al.Passive and accurate torque control of series elastic actuators[C]/ / IEEE / RSJ International Conference on Intelligent Robots and Systems, 2007.San Diego, CA:IEEE/ RSJ, 2007:3534-3538.
[9] Wyeth G.Control issues for velocity sourced series elastic actuators[C]/ / Proceedings of the 2006 Australasian Conference on Robotics&Automation.Auckland, New Zealand:Australian Robotics and Automation Association (ARAA), 2006.
[10] Wyeth G.Demonstrating the safety and performance of a velocity sourced series elastic actuator[C]/ / IEEE International Conference on Robotics and Automation, 2008.Pasadena, CA:IEEE, 2008:3642-3647.
[11] Petit F, Albu-Schaffer A.State feedback damping control for a multi DOF variable stiffness robot arm[C]/ /2011 IEEE International Conference on Robotics and Automation ( ICRA 2011).Shanghai, China:IEEE, 2011:5561–5567.
[12] Paine N, Mehling J S, Holley J, et al.Actuator control for the NASA-JSC valkyrie humanoid robot:a decoupled dynamics approach for torque control of series elastic robots[J].Journal OF Field Robotics, 2015, 32(3):378-396.
[13] Chen P, Li H Y.A rotor-separated dynamic modeling method for flexible manipulators based on FS-SEA[C]/ / IEEE-ROBIO 2015.Zhuhai, China:IEEE, 2015.Processing.
[14] 王东署,沈大中.一种改进机器人计算力矩控制的神经网络补偿方法[J].高技术通讯, 2007, 17(5):479-483.Wang D S, Shen D Z.A method of an enhanced computedtorque control for robot with a neural-compensator[J].Chinese High Technology Letters, 2007, 17(5):479-483.(in Chinese)
[15] 张宏敏,刘延斌.基于计算力矩法的3-RRRT并联机器人控制研究[J].机械设计与制造, 2009(1):174-176.Zhang H M, Liu Y B.Study on control of a 3-RRRT parallel robot based on computed-torque[J].Machinery Design&Manufacture, 2009(1):174-176.(in Chinese)
[16] 龚捷,鲍金锋,衣冠超,等.基于计算力矩法的装载机工作装置轨迹控制[J].机械工程学报, 2010, 46(13):141-146.Gong J, Bao J F, Yi G C, et al.Trajectory-following control for manipulator of wheel loaders based on computed torque [J].Journal of Mechanical Engineering, 2010, 46 (13):141-146.(in Chinese)
[17] 李洪凤,宋振辉,郭辰,等.基于计算力矩法的永磁球形电动机轨迹跟踪控制[J].天津大学学报, 2013, 46 (11):991-997.Li H F, Song Z H, Guo C, et al.Control for trajectory tracking of permanent magnet spherical motor based on computed torque method[J].Journal of Tianjin University, 2013, 46 (11):991-997.(in Chinese)
An Improved Feedback Computed Torque Control Method for FS-SEA Flexible Manipulators
CHEN Peng1,2,LI Hongyi1,3
(1.State Key Laboratory of Robotics,Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110016,China;2.University of Chinese Academy of Sciences,Beijing 100049,China;3.General Robots Corp.,Shenyang 110000,China)
Abstract:For flexible-joint manipulators based on FS-SEA(force sourced series elastic actuator),when their dynamic models are known,the feedback computed torque method is a very intuitional control method.However,for a system whose dynamic parameters are difficult to be determined accurately,which probably suffers an external impact as well,the traditional feedback computed torque method can hardly make a stable control.This paper proposed an improved control method based on the traditional feedback computed torque method.Through introducing an adaptive compensation term into the control law,the asymptotic stability of the control system was guaranteed in the case of inaccurate estimation of the manipulator’s dynamic parameters or external force;through introducing a low-pass filter after the system’s acceleration command,the control system’s ability of resisting external impacts was enhanced significantly.The simulations demonstrated that controlling FS-SEA flexible manipulators with the improved feedback computed torque method could not only ensure system stability and tracking accuracy,but also offer the control system very strong impact resisting capability.
Key words:flexible manipulators;SEA;computed torque;improvement;adaptive compensation;asymptotic stability;low-pass filter;impact resistance
作者简介:陈鹏(1983-),男,博士研究生,研究方向为机器人学、智能控制与遥操作。E-mail:chenpeng@sia.cn
基金项目:国家磁约束核聚变能专项(2012GB102005)
收稿日期:2015-09-17;修回日期:2016-03-08
中图分类号:TP24
文献标识码:A
文章编号:1674-5825(2016)02-0233-08
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
物流技术与应用(2022年5期)2022-06-17
黑龙江大学自然科学学报(2022年1期)2022-03-29
文化创新比较研究(2020年7期)2021-01-13
汽车零部件(2019年7期)2019-08-16
山东青年(2016年12期)2017-03-02
中学物理·高中(2016年8期)2016-08-08
航天制造技术(2016年6期)2016-05-09
航天制造技术(2016年6期)2016-05-09