
PMSM转子初始位置检测分析及起动策略
2016-05-23 07:02:14王要强马小勇程志平张志强
电力自动化设备 2016年9期
王要强,马小勇,程志平,张志强
(郑州大学 电气工程学院,河南 郑州 450001)
0 引言
永磁同步电机PMSM(Permanent Magnet Synchronous Motor)具有功率密度高、结构简单以及调速性能好等优点,在工业领域得到了广泛的应用[1-3]。为了完成永磁同步电机的转速和转矩控制,需要得到精确的PMSM转子位置[4]。
目前PMSM转子位置获取方式主要包括有位置传感器和无位置传感器2种。前者依靠位置传感器完成转子位置检测,后者通过电流、电压信号估算出转子位置。基于无位置传感器的电机转子位置获取方法可以降低系统成本、提高系统可靠性[5],近年来得到了国内外学者的广泛关注。但由于无位置传感器方法存在算法较为复杂[6-7]、在电机静止或低速时不能准确检测转子的位置[8]且对电机参数依赖性强[9]等问题,目前有位置传感器的转子位置检测方法仍处于主流的地位。
对于有位置传感器的PMSM转子位置检测方法,常用的传感器主要有旋转变压器、绝对式编码器和增量式编码器等。旋转变压器的体积较大,且其低速响应不理想,而高分辨率的绝对式编码器的价格普遍较贵[10],因此增量式编码器在PMSM控制领域得到了广泛的应用[11]。在基于增量式编码器的PMSM控制系统中,如何准确地检测转子初始位置是电机能够平稳起动的关键,也是这类PMSM控制系统的难题。
文献[12-13]采用恒压频比控制的方法,在定子绕组内产生旋转的电压矢量来起动电机。该方法具有不依赖电机参数、算法简单等优点,但在电机起动过程中易出现过流的问题。文献[14]向PMSM定子绕组通入一系列方向已知的电流矢量,并根据增量式编码器输出的正交脉冲信号来判断转子初始位置。当编码器不再输出正交脉冲信号时,对应的定子电流矢量方向即为PMSM转子磁场方向。该方法可为PMSM起动提供确定的转子初始位置信息,但对编码器的分辨率要求较高,且抗干扰能力较差。文献[15-16]在PMSM定子绕组内产生低速旋转的电流矢量,在该矢量的作用下,转子最终被拉至角度已知的位置。该方法可以准确地检测出转子的初始位置,但其检测过程较为复杂,且耗时较长,不利于电机的快速起动。
本文首先从定子电流矢量的角度预定位PMSM转子,并导出定子电流矢量的产生方法,获取确定的转子位置信息。然后,提出基于转子预定位的PMSM起动策略,并在起动过程中校正增量式编码器。仿真及实验结果验证了理论分析的正确性和所提方法的有效性。
1 PMSM模型
图1为PMSM的物理模型,图中极对数pn=1。将三相绕组的轴线方向分别定义为A轴、B轴和C轴;将转子磁场方向定义为d轴,垂直于转子磁场方向定义为q轴。将转子磁场方向(d轴)与A轴的夹角θ定义为转子电气角度。假定三相定子绕组星形连接,流入三相定子绕组的电流为:
其中,iA、iB及iC为三相定子电流;Im为定子电流矢量Is的幅值;ω为定子电流矢量的旋转角速度。

图1 永磁同步电机物理模型Fig.1 Physical model of PMSM
两相同步旋转坐标系下的PMSM数学模型为:
其中,ud、uq为定子电压;Rs为定子电阻;id、iq为定子电流;Ld、Lq为定子电感;ωr为转子机械角速度;ψf为永磁磁链;Te为电磁转矩;TL为负载转矩;J为转子转动惯量;B为粘滞摩擦系数。
2 转子初始位置检测
2.1 转子预定位
在电机起动前,转子位置未知的情况下,若PMSM驱动器在定子绕组通入方向及大小均恒定的定子电流矢量,该电流矢量产生的磁场与转子磁场的相互作用会使得转子被拉至某个固定位置后静止,该位置由定子电流矢量的方向来决定。如果能够探知两者之间的关系,即可在电机起动前实现转子位置由未知状态到已知状态的转变,这样就完成了转子初始位置检测,该过程在此称为PMSM起动前的转子预定位。
在电机起动前,不同方向的恒定定子电流矢量可将转子预定位至不同的固定位置。本文以转子被预定位至电气角度为零度的位置(以下简称“零度位置”)为例,分析预定位过程中恒定定子电流矢量的方向与转子位置之间的关系。
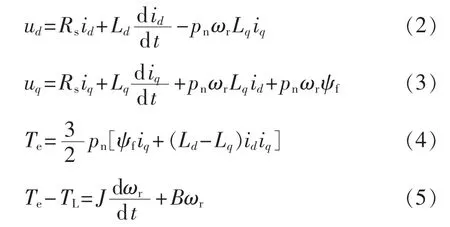
由式(1)所示的三相定子电流关系可知,当iA为最大值Im时,iB和iC为-Im/2。此时,三相定子电流矢量如图2所示。由于IB和IC关于A轴对称,定子电流合矢量方向与A轴同向,如图2中I0所示,定子磁动势f0与定子电流矢量I0同向。
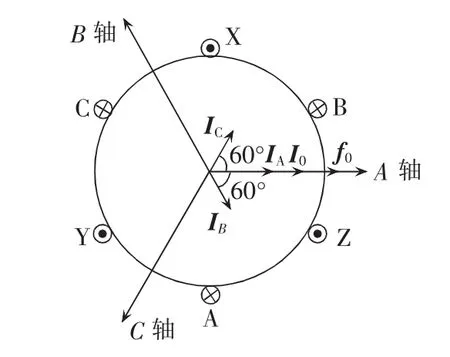
图2 A相电流最大时的定子电流矢量与磁动势Fig.2 Stator current vectors and magnetomotive force when maximum iAis achieved
在此约定,磁动势方向由定子指向转子时,该极为定子磁场的N极;磁动势方向由转子指向定子时,该极为定子磁场的S极。由此可得,定子电流矢量I0产生的理想定子磁场的磁极如图3中虚线框部分所示。
图3 PMSM转子预定位至零度位置示意图Fig.3 Schematic diagram of pre-locating PMSM rotor to zero-position
假设此后三相定子电流不再变化,即定子电流矢量恒为I0,那么在图3所示的定子磁场的持续作用下,转子的磁场方向将与A轴重合,即转子被预定位至零度位置。
2.2 定子电流矢量I0的产生
在转子被预定位至零度位置的过程中,如何产生图2所示的恒定定子电流矢量I0是关键。定子电流矢量I0是三相定子电流分量的合矢量,在产生该定子电流矢量时,三相定子电流关系为:

经过式(7)和式(8)所示的 CLARKE 变换和PARK变换后,三相静止坐标系下的定子电流可等效至同步旋转坐标系。
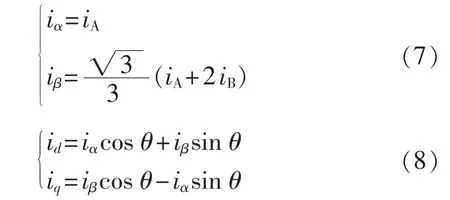
由于在定子电流矢量I0的作用下,转子最终被预定位至零度位置,因此式(8)中θ设为零度,此时结合式(6)—(8)可得:id=Im,iq=0。
由此可见,在d-q坐标系下,控制id为定值、iq为零,且将转子电气角度给定为零度,即可产生恒定的定子电流矢量I0。
考虑到转子磁场定向的PMSM矢量控制策略可在同步旋转坐标系下实现d、q轴定子电流的控制,这为恒定定子电流矢量I0的产生提供了条件。对应的PMSM矢量控制策略框图如图4所示,图中n*表示电机的给定转速,通过坐标变换将控制过程中的交流量变为直流量,利用电流环和速度环的调节,实现对电机的控制。
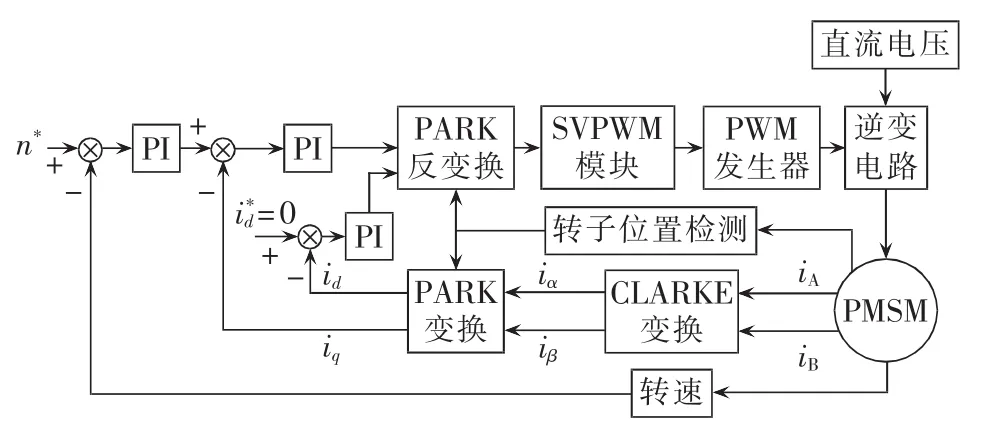
图4 PMSM矢量控制策略框图Fig.4 Block diagram of vector control strategy for PMSM
由于电流环可将同步旋转坐标系下的电流维持在定值,故对上述控制策略做如下修改:去除速度环,保留电流环,且电流环给定为并将转子的电气角度设定为零度。修改后的矢量控制策略框图如图5所示。根据修改后的控制框图的电流环的调节作用,即可在定子绕组内产生恒定的定子电流矢量I0。
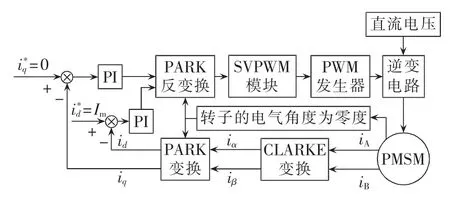
图5 修改的矢量控制策略框图Fig.5 Block diagram of modified vector control strategy
2.3 转子初始位置检测分析
在转子被预定位至零度位置的过程中,PMSM控制系统处于“预定位进行状态”;在转子被预定位至零度位置后,PMSM控制系统处于“预定位完成状态”。根据上述2种状态对基于预定位方法的转子初始位置检测过程进行分析。
在预定位完成状态下,定子电流矢量为I0且方向恒定,其在q轴分量iq为零。
a.电磁转矩:由式(4)可知,PMSM电磁转矩与iq成正比,由于此时iq为零,故电磁转矩为零。
b.反电势:转子预定位完成后,电机不再转动,故其输出的反电势为零。
c.定子电流:在预定位完成状态下,三相定子电流关系应如式(6)所示。
在预定位进行状态下,id和iq是变化的,id趋于定值,iq趋于零,定子电流矢量不断趋近I0。
a.电磁转矩:在预定位进行状态下,由于转子初始位置是未知的,故其运动方向未知;iq虽然最终趋近于零,但其变化过程是不确定的;电磁转矩的变化过程也不确定,但其亦呈趋于零的趋势。
b.运动过程:在预定位进行状态下,转子的转速由零开始逐渐增大,而后减小为零。
c.反电势:在预定位进行状态下,转子由于运动产生了反电势。设电机的反电势常数为Ke,反电势E与转速n的关系为:

由式(9)可知,反电势与转速成正比,故反电势的变化趋势亦为先增大后减小。
3 基于转子预定位的起动策略
一般而言,通过转子预定位检测出转子的初始位置后,结合相应的控制策略,即可完成电机的起动。但是对于采用增量式编码器的PMSM控制系统,在电机起动过程中,不但要进行转子初始位置的检测,而且需要对编码器进行校正。
在采用增量式编码器的PMSM控制系统中,转子每转一周,编码器输出2路正交脉冲信号和1路单脉冲信号。其中,2路正交脉冲信号分别记为信号A和信号B,其脉冲个数均为N,称为编码器的线数;单脉冲信号记为Z信号。
在实际应用中,对正交脉冲信号一般采用双边沿检测,因此转子每转一周,编码器输出的正交脉冲信号的总数为4N。若在转子电气角度为零度时,开始对正交脉冲信号进行计数,在某时刻,脉冲计数值为C0,则此时转子电气角度θe为:
其中,pn为转子极对数。
为消除因正交脉冲信号计数缺失等因素造成的式(10)中θe的累积误差,避免电机运行过程中出现过流、过热等问题,一般需在检测到Z信号时对脉冲计数器进行重新计数。但由于安装误差和运输过程中的振动等因素,Z信号所在位置的电气角度常常不为零度,即Z信号所在位置与A轴不重合。为保证转子位置检测的准确性,必须获取Z信号与A轴的夹角,即进行编码器校正。
设Z信号与A轴之间的机械偏差角为θZ,如果检测到Z信号后某时刻的脉冲计数值为C1,则转子电气角度θe可描述为:

设偏差角θZ对应的脉冲个数为CZ,则两者之间的关系为:

为便于说明,将CZ定义为“编码器校正值”。
图6给出了PMSM起动策略的工作流程图,可在获取转子初始位置的同时,完成编码器的校正,主要包含如下3个步骤。
a.转子初始位置检测。
在转子位置未知的情况下,根据图5所示的控制框图,产生恒定的定子电流矢量I0,将转子预定位至零度位置。这样,转子的位置就由未知状态变为已知状态,从而获取了转子初始位置。
b.Z信号获取前的转子电气角度计算。
在完成转子预定位后,其电气角度为零度,符合式(10)的前提,此时对脉冲计数器清零。在检测到Z信号之前,根据脉冲计数值与式(10)即可准确获得在这一过程中的转子电气角度。
c.获取编码器校正值。
在首次检测到Z信号时,记录此时的脉冲计数值,该值即为编码器校正值,结合式(12)可计算出Z信号与A轴的机械偏差角,从而完成编码器校正。此后,根据式(11)计算转子电气角度。

图6 基于转子预定位的PMSM起动策略Fig.6 PMSM startup strategy based on pre-located initial rotor position
在上述起动策略中,PMSM控制系统的起动将经历转子预定位进行、转子预定位完成、编码器校正及正常工作4个阶段。
4 仿真分析及实验验证
4.1 仿真分析
根据提出的起动策略,搭建采用增量式编码器的PMSM控制系统与电机起动仿真模型,进行仿真研究。永磁同步电机的参数为:定子相电阻2 Ω;定子相电感 8.35×10-4H;转子转动惯量 1×10-3kg·m2;极对数4;转矩系数1.05 N·m/A。增量式编码器的参数为:线数为2500,采用双边沿检测方式,即转子每转一周输出的脉冲总数为10000;Z信号与A轴夹角设定为4π/3(可为0~2π之间的任意值),对应的编码器校正值为6667。
仿真条件为:转子初始电气角度为π/2(可为0~2π之间的任意值);完成转子预定位前,采用图5所示的控制策略,产生恒定的定子电流矢量;完成转子预定位后,控制策略转为图4所示的矢量控制策略,电机转速给定值为1000 r/min。
图7为PMSM转子电气角度仿真波形。图中,虚线框①对应转子预定位进行阶段(0~0.05973 s),转子的电气角度从初始设定值π/2逐渐变为0;虚线框 ②对应转子预定位完成阶段(0.05973~0.1 s),转子的电气角度维持为零度不变;虚线框③和④分别对应编码器的校正阶段(0.1~0.1436 s)与 PMSM 起动完成后(0.1436~0.3 s)的正常工作阶段。 由图可知,提出的PMSM起动策略可以将转子初始位置预定位至零度,并能准确获取转子电气角度。

图7 转子电气角度波形Fig.7 Waveform of electrical angle of PMSM rotor
图8为编码器校正值CZ的仿真曲线。图中,t=0.1436s时,编码器输出Z信号,得到的CZ值为6667。由图可知,校正结果与设定值相等,提出的起动策略能够准确地完成编码器的校正。
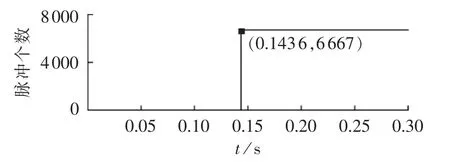
图8 编码器校正值Fig.8 Value of encoder correction
图9描述了PMSM三相定子电流的变化情况。其中,图9(a)为转子预定位进行、转子预定位完成、编码器校正和PMSM起动完成后正常工作4个阶段的三相定子电流,图9(b)为转子预定位进行和完成阶段PMSM三相定子电流的放大波形。由图可以看出,转子预定位进行阶段(虚线框①)下的三相定子电流是动态变化的,其变化趋势趋于定值;转子预定位完成阶段(虚线框②)下的三相定子电流为定值,且数值关系上满足式(6),从而验证了前文定子电流矢量I0的产生及其与转子预定位角度间的关系分析是正确的。PMSM起动完成后三相定子电流稳定在正弦状态且曲线平滑,这是以PMSM转子位置的准确获取为前提的,起动策略中的编码器校正环节保证了转子位置的准确获取。

图9 PMSM三相定子电流波形Fig.9 Three-phase waveforms of PMSM stator current
图10为两相同步旋转坐标系下的PMSM定子电流变化情况。其中,图10(a)描述了从t=0 s时刻电机静止到起动完成后正常工作整个过程的情况,图10(b)为转子预定位进行阶段(虚线框①)和预定位完成阶段(虚线框②)的定子电流放大图。由图可以看出,在预定位进行阶段,d-q坐标系下的定子电流动态变化,并在预定位完成后稳定在定值且定子电流矢量与d轴保持同向。PMSM起动完成后,定子电流在矢量控制策略的作用下仍为定值,但定子电流矢量与q轴保持同向。
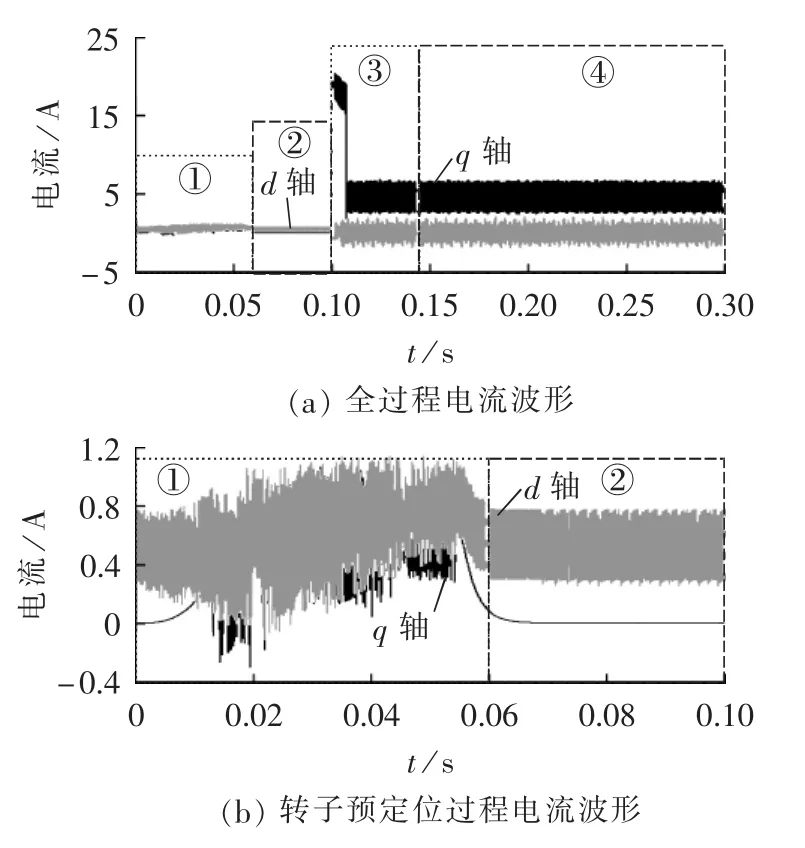
图10 d-q坐标系下的PMSM定子电流Fig.10 PMSM stator current waveforms in d-q frame
图11给出了PMSM的转速波形。图中,在转子预定位进行阶段(虚线框①),转子首先进行加速度逐渐减小的加速运动,而后进行加速度逐渐增大的减速运动,并最终在转子预定位完成时,电机的转速降为零,转子处于静止状态,这里与前文预定位过程的转子运动分析是一致的。PMSM得到起动指令后转速快速攀升至给定值1000 r/min,并维持不变,在这一过程中,首先进行编码器校正,从而为电机正常工作提供准确的转子位置信息,提出的起动策略保证了电机的平稳起动与可靠运行。
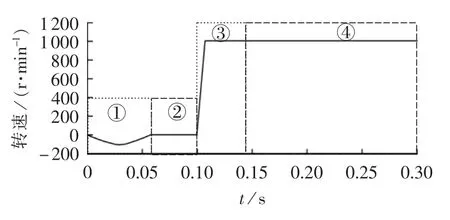
图11 PMSM转速波形Fig.11 Rotational speed waveform of PMSM
4.2 实验验证
为进一步验证理论分析与提出的策略,搭建永磁同步电机驱动控制实验平台,进行实验研究。平台以TMS320F2812为主控芯片,主电路采用三相电压源逆变器,电机及增量式编码器参数与仿真一致。逆变器开关频率为10 kHz,直流母线电压为515 V,转速给定值为1000 r/min。为保证通用性,编码器的校正值未知,且在电机起动前,首先将转子转至任意某一位置,然后基于提出的策略起动电机进行实验验证。
图12为转子电气角度的实验波形。图中,虚线框①、②和③分别对应转子预定位进行阶段、转子预定位完成阶段、编码器校正及PMSM正常工作阶段。由图可以看出,在电机起动前,转子经过预定位过程后,被拉至零度位置,电气角度归零,并维持不变,为编码器的校正提供基准。
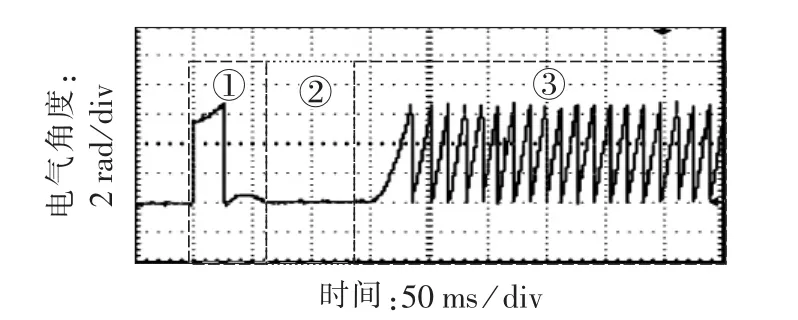
图12 转子电气角度实验波形Fig.12 Experimental waveform of electrical angle of PMSM rotor
图13为编码器校正值的实验结果。图中,转子预定位完成后,在检测到Z信号前的编码器校正值为零;检测到Z信号后可以得到编码器校正值为4105。结合图12(虚线框③)可以看出,转子电气角度均匀变化,得到的编码器校正值保证了转子电气角度的准确检测,电机能够平稳起动。
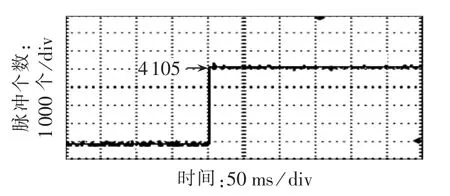
图13 编码器校正实验结果Fig.13 Experimental result of encoder correction
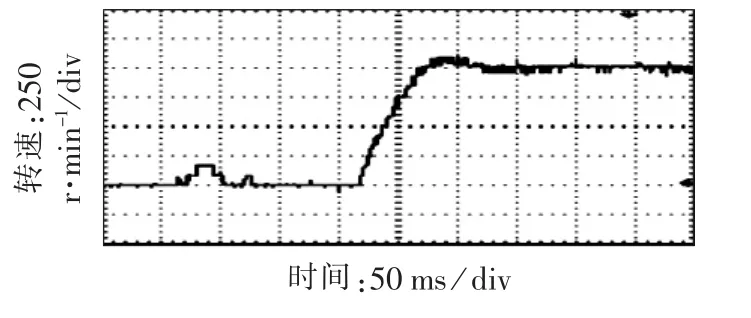
图14 PMSM转速实验曲线Fig.14 Experimental curve of PMSM speed
图14为PMSM转子预定位、编码器校正以及正常工作整个过程的转速实验曲线。由图可以看出,在转子预定位过程中,转子经过加速、减速运动后静止;得到起动指令后,转速增加并最终维持在给定值1000 r/min,这是以图12中转子电气角度的准确检测为基础的,同时也验证了图13中编码器校正结果的正确性。
5 结论
本文阐述了基于转子预定位的PMSM转子初始位置检测方法,导出了定子电流矢量的产生方法,并提出了一种基于增量式编码器的PMSM起动策略。结果表明,该起动策略能将电机转子预定位至零度位置,确定电机转子的初始位置,并完成编码器的校正,获取精确的转子电气角度,实现电机的平稳起动与可靠运行。另外,所提策略与分析方法也可以为解决其他电机类型的位置检测与起动问题提供借鉴。
参考文献:
[1]周羽,李槐树,黄克峰.带输出滤波器的永磁同步电机系统的逆变器最大功率因数研究[J].电力自动化设备,2014,34(5):93-97.ZHOU Yu,LI Huaishu,HUANG Kefeng.Maximum power factor of inverter for PMSM system with output filter[J].Electric Power Automation Equipment,2014,34(5):93-97.
[2]MOREL F,LINSHI X,RETIF J M,et al.A comparative study of predictive current control schemes for a permanent-magnet synchronous machine drive[J].IEEE Transactions on Industrial Electronics,2009,56(7):2715-2728.
[3]LI Shihua,GU Hao.Fuzzy adaptive internal model control schemes for PMSM speed-regulation system[J].IEEE Transactions on Industrial Informatics,2012,8(4):767-779.
[4]王萌,杨家强,张翔,等.一种表贴式永磁同步电机电流矢量闭环I/f控制方法[J].中国电机工程学报,2015,35(10):2513-2521.WANG Meng,YANG Jiaqiang,ZHANG Xiang,et al.An I/f control method with closed-loop regulation of current vector for surface permanent magnet synchronous motor drives[J].Proceedings of the CSEE,2015,35(10):2513-2521.
[5]HU Jianhui,ZOU Jibin,XU Fei,et al.An improved PMSM rotor position sensor based on linear hall sensors[J].IEEE Transactions on Magnetics,2012,48(11):3591-3594.
[6]黄科元,周李泽,周滔滔,等.一种增强可靠性的永磁同步电机初始角检测[J].电工技术学报,2015,30(1):45-51.HUANG Keyuan,ZHOU Lize,ZHOU Taotao,et al.An enhanced reliability method for initial angle detection on surface mounted permanent magnet synchronous motors[J].Transactions of China Electrotechnical Society,2015,30(1):45-51.
[7]鲁家栋,刘景林,卫丽超.永磁同步电机转子初始位置检测方法[J].电工技术学报,2015,30(7):105-111.LU Jiadong,LIU Jinglin,WEI Lichao.Estimation of the initial rotor position for permanent magnet synchronous motors[J].Transactions of China Electrotechnical Society,2015,30(7):105-111.
[8]GENDUSO F,MICELI R,RANDO C,et al.Back EMF sensorless-control algorithm for high-dynamic performance PMSM [J].IEEE Transactions on Industrial Electronics,2010,57(6):2092-2100.
[9]NAKASHIMA S,INAGAKI Y,MIKI I.Sensorless initial rotor position estimation of surface permanent-magnet synchronous motor[J].IEEE Transactions on Industry Applications,2000,36(6):1598-1603.
[10]莫会成,闵琳.现代高性能永磁交流伺服系统综述——传感装置与技术篇[J].电工技术学报,2015,30(6):10-21.MO Huicheng,MIN Lin.Summary of modern high performance permanent magnet AC servo system sensor device and technology[J].Transactions of China Electrotechnical Society,2015,30(6):10-21.
[11]WEKHANDE S,AGARWAL V.High-resolution absolute position vernier shaft encoder suitable for high-performance PMSM servo drives[J].IEEE Transactions on Instrumentation and Measurement,2006,55(1):357-364.
[12]AGARLITA S,COMAN C,ANDREESCU G,et al.Stable V/f control system with controlled power factor angle for permanent magnet synchronous motor drives[J].IET Electric Power Applications,2013,7(4):278-286.
[13]ANCUTI R,BOLDEA I,ANDREESCU G.Sensorless V/f control ofhigh-speed surface permanentmagnetsynchronousmotor drives with two novel stabilising loops for fast dynamics and obustness[J].IET Electric Power Applications,2010,4(3):149-157.
[14]杨立永,陈为奇.永磁同步电机转子初始位置检测研究[J].电气传动,2012,42(3):57-61.YANG Liyong,CHEN Weiqi.Study on initial position detection of PMSM rotor[J].Electric Drive,2012,42(3):57-61.
[15]朱熀秋,成秋良.无起动绕组永磁同步电机初始定位及起动策略[J].中国电机工程学报,2008,28(9):61-65.ZHU Huangqiu,CHENG Qiuliang.Initial orientation and starting strategy on PMSM without starting windings[J].Proceedings of the CSEE,2008,28(9):61-65.
[16]肖烨然,刘刚,宋欣达.基于改进滑模观测器的永磁同步电机无位置传感器 I/F 起动方法[J].电力自动化设备,2015,35(8):95-102.XIAO Yeran,LIU Gang,SONG Xinda.Sensorless I/F startup based on modified sliding mode observer for PMSM[J].Electric Power Automation Equipment,2015,35(8):95-102.
猜你喜欢
防爆电机(2021年1期)2021-03-29 03:02:46
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
测控技术(2018年2期)2018-12-09 09:00:52
成都信息工程大学学报(2018年3期)2018-08-29 01:08:40
电子设计工程(2017年20期)2017-02-10 03:39:29
电子器件(2015年5期)2015-12-29 08:42:24
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
电机与控制应用(2015年10期)2015-03-01 03:50:16
电测与仪表(2014年13期)2014-04-04 12:04:18
