基于矢量控制的感应电机弱磁控制算法研究
2016-05-19 02:50陶华堂李强中国卫星海上测控部江苏江阴214400
电气传动 2016年3期
关键词:矢量控制
陶华堂,李强(中国卫星海上测控部,江苏江阴214400)
基于矢量控制的感应电机弱磁控制算法研究
陶华堂,李强
(中国卫星海上测控部,江苏江阴214400)
摘要:变频调速控制系统要求电机具有宽范围的恒功率弱磁调速能力,并能输出较大的转矩。提出一种感应电动机弱磁状态下励磁电流和转矩电流轨迹控制的新方法。在满足电机和驱动器最大电压和电流约束条件的前提下,对电机励磁电流轨迹和转矩电流轨迹分别独立控制,实现全速度范围内的最大转矩输出。设计了该弱磁控制算法的实现策略,并在7.5 kW感应电机上进行实验研究,与传统弱磁控制方法相比,提出的弱磁控制方法可以输出更大的转矩,电流波动小,系统更稳定。
关键词:感应电机;矢量控制;弱磁;最大转矩电流比控制
感应电机具有转子结构坚固、可靠性高、成本低、转矩波动小和噪声小等优点。基于矢量控制的感应电机变频调速系统被广泛应用于家用电器、电梯曳引、电动汽车、数控机床、船舶动力等领域。采用电压源逆变器驱动电机时,由于受到逆变器最大输出电压和最大输出电流的限制,需要采用弱磁调速等方法使电机输出最大转速,且高速时仍能最大限度输出电磁转矩。
传统的弱磁控制方法是在基速以上,控制电机磁链和电机转速成反比[1-2],这种方法简单易实现,但是没有输出最大转矩电流比,即没有最大限度输出转矩;文献[3]提出了一种过调制算法,用来实现永磁同步电机的弱磁调速,但是该方法实现起来较困难;文献[4-11]提出的查表修正方法目前较为流行,主要是根据电机的转速通过查表修正电机励磁电流iM和转矩电流iT,此类方法简单易实现,应用也较为广泛,但是受电机本身参数影响较大;文献[12]提出了一种通过控制电机电压轨迹的方法实现电机弱磁调速控制,该方法不受电机参数影响,但前提是要获得电机励磁电流的大小。近年来,利用M-T轴电压参考进行弱磁控制的方法受到了越来越多的关注[13-14],电压参考值和它的最大限制值之间的偏差用于确定M轴电流的大小,这种方法对参数不敏感,但如何最大限度地利用直流母线电压仍需研究。以上方法各有优缺点,但都可以实现电机弱磁调速,只是输出转矩大小、电流电压利用率及实现的难易程度不一样。本文在总结已有研究成果基础上,提出一种可以尽可能输出最大电磁转矩的弱磁调速方法。该方法基于转子磁场定向的矢量控制,在随转子磁链同步旋转的M-T坐标系下,根据电机的转速分别控制纯转矩电流轨迹和纯励磁电流轨迹,实现电机变频调速。
1 感应电机弱磁控制
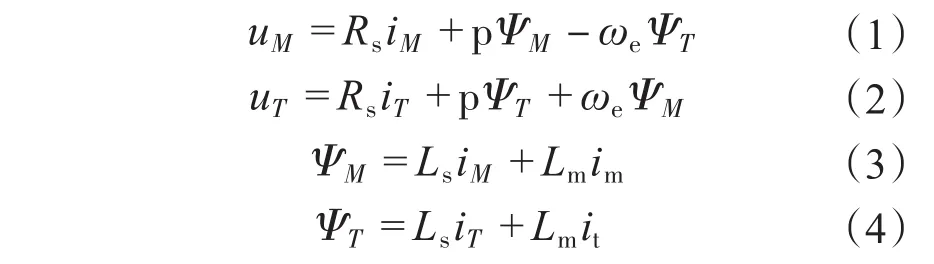
在随转子磁场同步旋转M-T坐标系下,感应电机的定子电压方程和磁链方程为
其中
式中:uM,uT为定子电压在M,T轴分量;iM,iT为定子电流在M,T轴分量;ΨM,ΨT为定子磁链在M,T轴分量;Ψr为转子磁链;Rs为电机定子电阻;Lm为互感;Ls为定子自感;p为微分算子;ωe为磁场同步旋转速度。
由式(4)可以得到:

其中

电机在高速稳定状态运行时,考虑到电机的定子电流瞬态过程很短,与电机定子电流相关的微分项可以忽略,同时定子压降也可以忽略,则由式(1)、式(2)、式(5)可得:

感应电动机矢量控制系统由三相电压源逆变器驱动时,由于受驱动器容量的限制,驱动器可以提供的电压和电流矢量的幅值是有限的,因此电动机所承受的最大电压和最大电流分别为

式中:us_max为电压源逆变器能够提供的最大相电压峰值,V;is_max为电压源逆变器能够提供的最大相电流峰值,A。
将式(6)、式(7)带入式(8),则可以得到

式(9)和式(10)构成了电机电流轨迹平面上的电流限制圆和电压限制椭圆,如图1所示,电流(iM,iT)的轨迹必须在他们的重合面积范围内。当转速逐渐增大时,电压限制椭圆的面积逐渐减小,电流限制圆保持恒定,图1中ω1<ω2<ω3。
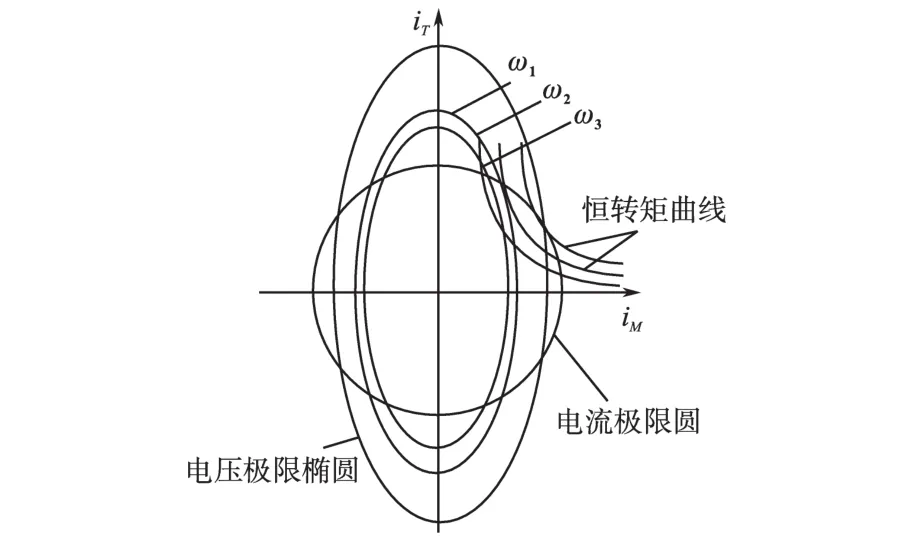
图1 电流限制圆和电压限制椭圆Fig.1 The current limit circle and voltage limit ellipse
2 最大转矩弱磁控制算法

由式(11)可以看出,当电机定子电流的乘积iMiT取最大值时,Te也达到最大值,即电机输出转矩最大,此时。根据电机转速可以将运行区间划分为恒转矩区、恒功率区及恒电压区3个区间,如图2所示。
最大转矩弱磁控制算法是指在满足电压、电流约束条件的前提下,在全速度范围内尽量使电机输出最大转矩的一种控制方法。基于转子磁场定向的感应电机电磁转矩方程为
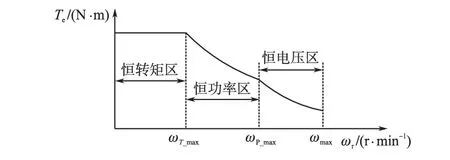
图2 电机转速区间Fig.2 The motor speed range
2.1恒转矩区
低速时,由于励磁电流iM不能为0,因此当过小时,可令iM等于1个最小限制值,如图3中的I1,此时电流轨迹沿直线AB走。当纯转矩电流逐渐增大到达B点时,为使电机尽量输出最大转矩,电流轨迹沿直线BC走。在C点时,iM达到电机最大励磁电流I2,随着负载转矩的持续增大,iM恒等于I2,电流轨迹沿直线CD走。
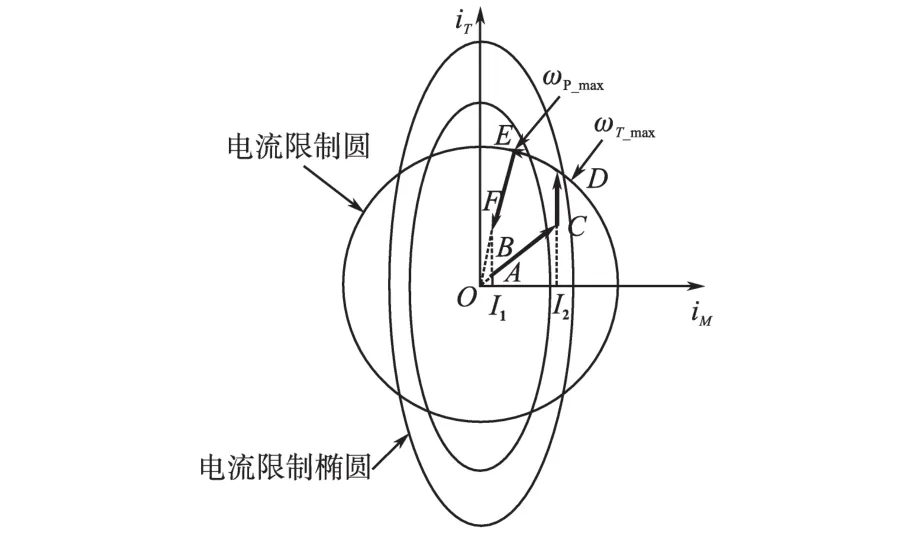
图3 电流控制轨迹Fig.3 The current control track
根据式(11)可以获得此时电机的最大输出转矩为

根据式(10)可以求得电机达到的最高转速ωT_max为

2.2恒功率区
在B点电机的转矩达到最大值Te_max,转速达到ωT_max,若要继续增加转速,只有通过减小iM才能实现,这种通过减小励磁电流增加电机转速的方法被称为弱磁调速。在电压和电流矢量的幅值均达到最大值后,由于逆变器容量的限制,电流和电压矢量的幅值不能继续增大,因此只能通过改变其相位角的方法使转速继续上升。此时,电流轨迹沿曲线DE走,根据式(9)、式(10)可得:

根据式(14)和式(15)控制iM和iT,可使电流轨迹沿着圆周DE行走到达E点,在整个控制过程中,电机电压矢量的幅值和电流矢量的幅值以及他们之间的相位基本保持不变,电机的输出功率也基本不变,故称为恒功率区。在E点电机达到恒功率区的最高转速ωP_max,由式(9)、式(10)可求得ωP_max为

2.3恒电压区
当电机转速超过ωP_max,即电流轨迹到达E点以后,要想继续增加电机转速,并要充分利用逆变器的电压输出能力,电压限制椭圆的离心率就必须不断减小,即必须令电压轨迹维持在E点不变,因此该区间被称为恒电压区。在此区间,,电机输出转矩只受电压限制椭圆的限制。根据式(9)、式(10)可得
根据式(17)、式(18)控制电流轨迹沿EF到达F点,在这个变化过程中,随着转速的不断升高,电流矢量的幅值也不断减小,逆变器的输出功率也急剧下降,电机电磁转矩也急速减小。
3 控制算法的实现策略
在分析了感应电机工作原理的基础上,提出基于转子磁场定向下的最大转矩弱磁控制算法。如果控制系统的最大允许电压us_max和最大允许电流is_max已知,根据式(13)和式(16)可以将电机的转速区间划分成恒转矩区、恒功率区、恒电压区3个区间,如图4所示。当转速满足0<ωr<ωT_max时,由速度PI调节器输出,根据转速的不同分别取I1,和I2;当转速满足ωT_max≤ωr<ωP_max时,可分别由式(14)、式(15)获得;当转速ωr≥ωP_max时,可分别由式(17)、式(18)获得。弱磁控制算法在感应电机矢量控制中的实现方法如图5所示。

图4 最大转矩弱磁控制算法Fig.4 The weakening control algorithm to output the maximum torque

图5 基于矢量控制的感应电机伺服系统框图Fig.5 The induction motor servo system block diagram based on vector control
4 实验研究
4.1实验设计
实验控制平台以TMS320F2812为核心构成一个全数字化控制系统,其硬件结构如图6所示。实验所用的三相感应电机参数如下:额定功率PN=7.5 kW,额定电流IN=139 A,额定电压UN=72 V,额定转速nN=2 000 r/min,最高转速nmax=4 800 r/min,额定转矩30 N·m,极对数Np=2。所采用的逆变器最大输出电流is_max为400 A,最大输出电压us_max为100 V。在图5所示的感应电机矢量控制系统中,实现本文提出的最大转矩控制弱磁算法,励磁电流iM和转矩电流iT的变化轨迹如图7所示。

图6 感应电机控制系统框图Fig.6 The block diagram of induction motor control system

图7 励磁电流iM和转矩电流iT的变化轨迹Fig.7 The trajectory of the excitation current iMand torque current iT
4.2实验结果分析
根据图5所示的感应电机矢量控制原理对电机实现变频调速控制,图8和图9分别是采用传统弱磁控制方法和最大转矩弱磁控制方法时电机性能曲线。观察图8和图9可以看出,根据电机转矩的变化,都将电机的转速分为3个区间,即为恒转矩区、恒功率区、恒电压区,与本文提出的理论相一致,不同的是图8从转速2 000 r/min开始进入弱磁,而图9在2 200 r/min才进入弱磁;另一个显著的区别就是输出转矩的变化,图8所示控制策略的最大输出转矩为54 N·m,而图9的最大输出转矩为60 N·m,并且在全速范围内,图9输出的转矩都大于图8;更重要的是图8的转矩曲线和电流曲线出现波动,而图9在全速范围内,电流曲线和转矩曲线的变化都很平缓和光滑,说明最大转矩控制策略下的电机运行更平稳,波动较小,而传统弱磁控制方法可能会出现较强烈的波动和振荡。
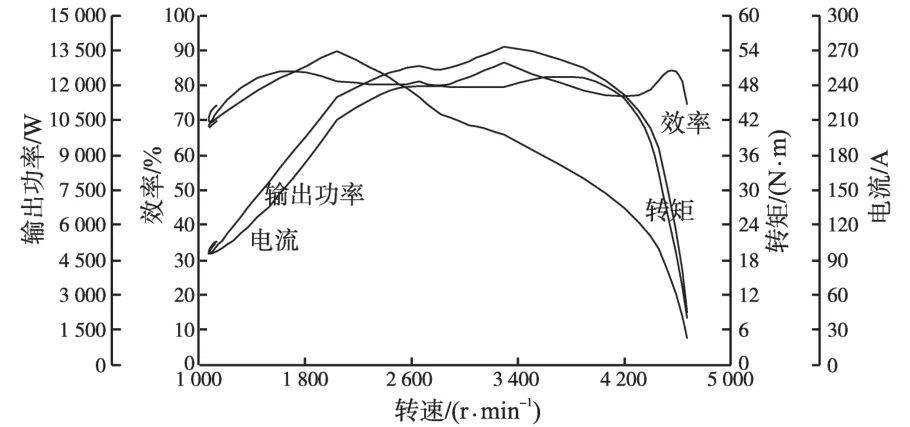
图8 传统弱磁控制算法下的电机输出性能曲线Fig.8 The motor performance curves under the traditional weakening control algorithm

图9 最大转矩控制弱磁的电机性能曲线Fig.9 The motor performance curves under the maximum torque weakening control
图10为传统弱磁控制方法下转速为2 600 r/min时的电机相电流曲线,根据图8可知此时已进入弱磁调速,相电流整体仍为正弦电流,但出现了较强的谐波成分,说明电机内部的磁场出现动荡,电机的转速和转矩输出存在波动,与图8所分析的结果一致。图11为采用最大转矩弱磁控制方法下电机转速为3 500 r/min时的相电流曲线,根据图9可得此时电机已进入恒功率区的高速部分,此时的电机相电流仍是理想的正弦电流,只有微弱的毛刺,说明电机内部的磁场更稳定,与图9分析的结果一致。

图10 传统方法控制下2 600 r/min时的相电流曲线Fig.10 The phase current curve under the traditional control method when 2 600 r/min

图11 最大转矩控制下3 500 r/min时的相电流曲线Fig.11 The phase current curve under the maximum torque weakening control when 3 500 r/min
由图8~图11的分析结果看出,采用最大转矩法弱磁控制方法不仅可以在全速范围内提升电机的转矩输出,更能优化电机的输出性能,转速和转矩输出更稳定,波动更小,从而系统性能更优。
5 结论
本文提出了一种感应电动机转子磁场定向时的弱磁控制算法,并提出了实现策略和方法。该算法不需要查表,简单易实现,可在全速范围内最大限度输出电磁转矩。最后进行了实验研究,结果表明,该算法不仅在转矩输出上优于传统弱磁控制方法,而且他的转矩和转速变化很平缓,波动小,系统稳定性高,更适合于高性能变频调速和伺服控制系统。
参考文献
[1]Xu Xingyi,Novotny D W.Selecting the Flux Reference for In⁃duction Machine Drives in the Field Weakening Region[C]// Conference Record of the 1991 IEEE Industry Applications Society Annual Meeting. Dearborn,Michigan,USA:IEEE In⁃dustry Applications Society,1991:361-367.
[2]李叶松,雷力.基于转子磁场定向的异步电动机弱磁方法研究[J].电力电子技术,2007,41(5):34-35.
[3]吴芳,万山明,黄声华.一种过调制算法及其在永磁同步电动机弱磁控制中的应用[J].电工技术学报,2010,25(1):59-63.
[4]Yusivar F,Kihara T,Sato M,et al. |Iq| Added Flux Weakening Strategy for the Rotor Flux Oriented Control of a Sinusoidal PWM VSI-fed Induction Motor[C]//The 27th Annual Confer⁃ence of the IEEE Industrial Electronics Society. Denver,Col⁃orado,USA:IEEE Industrial Electronics Society,2001:1160-1165.
[5]Kim S H,Sul S K. Voltage Control Strategy for Maximum Torque Operation of an Induction Machine in the Fieldweaken⁃ing Region[J]. IEEE Transactions on Industrial Electronics,1997,44(4):512-518.
[6]Grotstollen H,Wiesing J. Torque Capability and Control of a Saturated Induction Motor Over a Wide Range of Flux Weak⁃ening[J]. IEEE Transactions on Industrial Electronics,1995,42(4):374-381.
[7]Bianchi N,Bolognani S.Design Procedure of a Vector Con⁃trolled Induction Motor for Flux-weakening Operations[C]// Conference Record of the 1997 IEEE Industry Applications Conference. New Orleans,LA,USA:IEEE Industry Applica⁃tions Society,1997:104-111.
[8]Briz F,Diez A,Degner M W,et al. Current and Flux Regulation in Field-weakening Operation of Induction Motors[J].IEEE Transactionson Industry Applications,2001,37(1):42-50.
[9]Ahmad M Z,Idris N R N. Overmodulation and Field Weaken⁃ing in Direct Torque Control of Induction Motor Drives[C]// First International Power and Energy Conference. Putrajaya,Malaysia:IEEE Power Engineering Society Malaysia Chapter,2006:465-469.
[10]Bolognani S,Zigliotto M. Novel Digital Continuous Control of SVM Inverters in the Overmodulation Range[J]. IEEE Trans⁃actions on Industry Applications. 1997,33(2):525-530.
[11]Shin M H,Hyun D S,Cho S B. Maximum Torque Control of Stator-flux-oriented Induction Machine Driveinthe Field-weak⁃ening Region[J].IEEE Transactions on Industry Applications,2002,38(1):117-122.
[12]Lin P Y,Lai Y S. Novel Voltage Trajectory Control for Field-weakening Operation of Induction motor Drives[J].IEEE Transactionson Industry Applications,2011,47(1):122-127.
[13]Harnefors L,Pietilainen K,Gertmar L. Torque maximizing Field Weakening Control:Design,Analysis,and Parameter Selection[J]. IEEE Transactions on Industrial Electronics,2001,48(1):161-168.
[14]Casadei D,Mengoni M,Serra G,et al. Field-weakening Con⁃trol Schemes for High-speed Drives Based on Induction Mo⁃tors:a Comparison[C]//IEEE Power Electronics Specialists Conference. Rhodes,Greece:IEEE,2008:2159-2166.
修改稿日期:2015-09-02
Field Weakening Algorithm of Induction Motor Based on Vector Control
TAO Huatang,LI Qiang
(China Satellite Maritime Tracking and Command Department,Jiangyin 214400,Jiangsu,China)
Abstract:In frequency conversion timing control system,induction motor(IM)needs large speed range operation with constant output power,and could output greater torque as much as possible. A new exciting current and torque current trajectories control scheme for the field weakening operation of induction motor drive was presented. The proposed scheme,in which the tracks of excitation current and torque current were controlled independently,allows the motor to exploit the maximum torque capability in the whole speed range with the constraints of maximum voltage and current of the motor and inverter. The implementation strategy of the field weakening control algorithm was designed,and the experimental research was carried out on 7.5 kW induction motor. Compared with traditional weakening control algorithm,the weakening control scheme proposed could output greater torque,lower current fluctuation and more stably performance.
Key words:induction motor(IM);vector control;field weakening;maximum torque per ampere control
收稿日期:2015-06-02
作者简介:陶华堂(1979-),男,硕士研究生,工程师,Email:402607291@qq.com
中图分类号:TM30
文献标识码:A
猜你喜欢
科技创新与应用(2017年1期)2017-05-11
哈尔滨理工大学学报(2017年1期)2017-04-08
物联网技术(2017年3期)2017-03-30
电子技术与软件工程(2017年1期)2017-03-06
现代电子技术(2017年3期)2017-03-04
中国新技术新产品(2016年23期)2016-12-26
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
科技视界(2016年12期)2016-05-25
科技资讯(2015年19期)2015-10-09