猴车驱动装置设计与实现
2016-05-14 21:31刘欣欣
软件导刊 2016年5期
关键词:三维模型
刘欣欣

摘要:为了快速有效地获得猴车驱动装置的二维图形和三维模型模拟图,提出了一种基于VB 6.0和数字矿山LK平台实现的猴车驱动装置生成方法。通过分析猴车驱动装置的特点,将读入所要生成装置的信息提取出来作为猴车驱动装置的信息参数,通过相关参数的输入和不同零部件的选型,即可快速准确得到给定装置各部件的二维图形和三维模型,同时完成对该驱动装置的整体装配。实验结果表明,用户可以选择性地生成二维图形和三维模型,效率得到了极大提高。
关键词:猴车驱动装置;二维图形;三维模型
DOIDOI:10.11907/rjdk.161064
中图分类号:TP319
文献标识码:A 文章编号:1672-7800(2016)005-0123-03
0 引言
猴车是煤矿井下人员运输的重要设备,在斜巷和平巷的人员运送中,猴车以人员运输效率高、安全可靠的优点[1],成为井下人员运输必不可少的装备。在整个猴车系统中,驱动装置作为动力源,带动驱动轮、钢丝绳等循环运行,彰显了其在猴车系统中的重要地位。煤矿井下情况复杂,不同坡的倾斜角度和运输距离不同,因而对于猴车驱动装置功率要求也各不同。目前市面上有很多建模软件,其中蓝光数字矿山软件系统[2-3]功能独特,在煤矿行业应用广泛。该系统为设计人员快速得到驱动装置的二维图形和三维模型的模拟图提供了方便,也为猴车系统的总体设计提供了参考。
1 猴车驱动装置设计
1.1 驱动装置结构特点
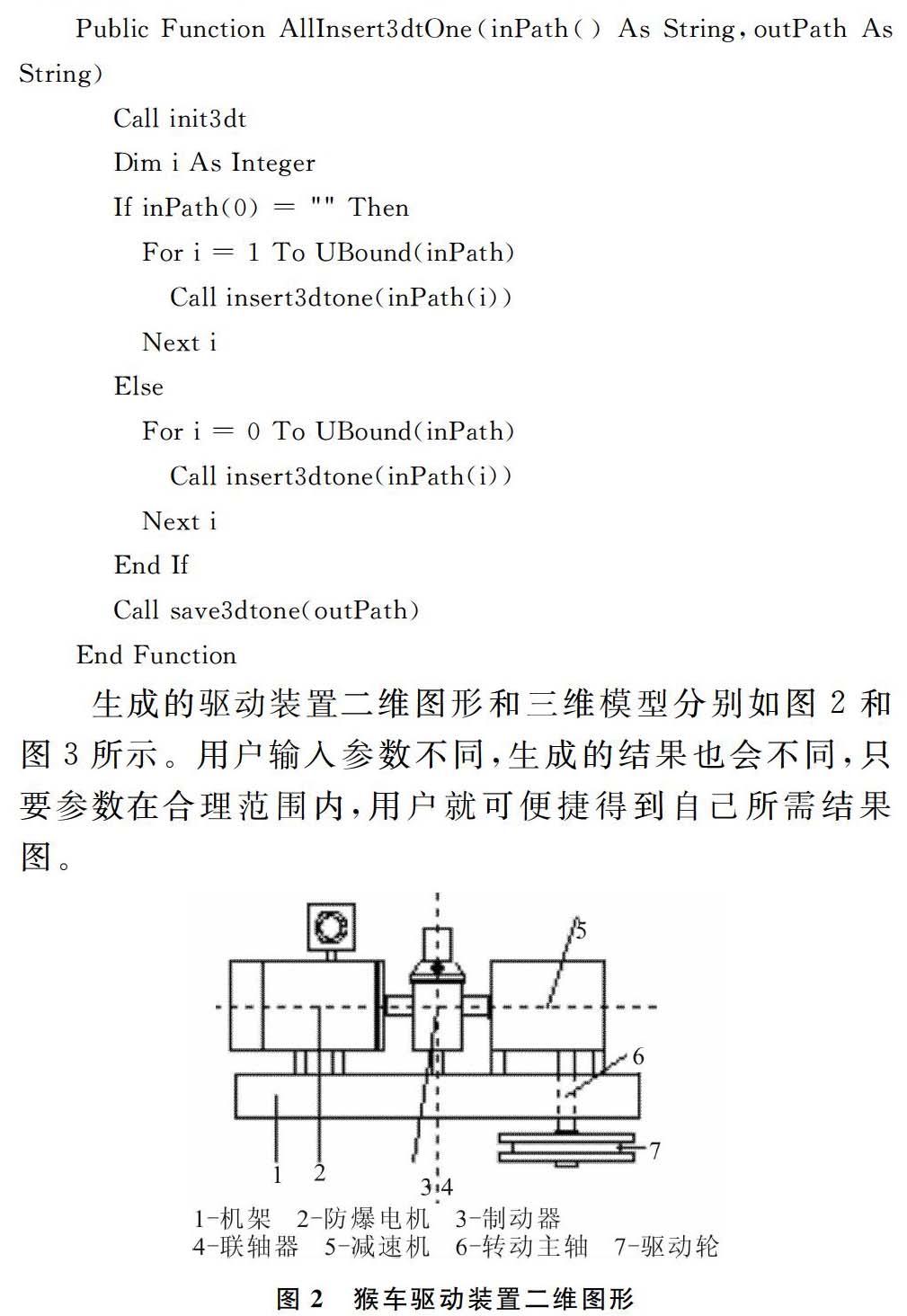
猴车驱动装置主要由防爆电动机、制动器、联轴器、减速机和机架组成[4]。以YB2-200L2-6型号电动机、TPS250-63-3F型号减速器、YT1-90/8型号液压推动器、BYWZ3B-315/90型号制动器[5-6]为例,根据驱动装置的电动机输出动力带动通过联轴器连接的减速机上驱动轮的原理[7],使其成为猴车系统的动力源。
1.2 驱动装置相关计算
设计并实现猴车驱动装置系统,首先需要有相关的参数作为支撑,主要参数[8-9]如表1所示。
驱动装置各部件的选择需符合设计依据,以RJY22-26/300型固定抱索器为例,给出相关验算[10]。
1.3 驱动装置信息参数提取
通过分析驱动装置电动机、制动器、联轴器和减速机各部件的结构特点,分别提取出电动机参数(电动机轴直径、钢壳长)、制动器参数(制动器制动臂长、制动臂高、制动臂间距、杠杆长、制动轮直径、液压推动器直径)、联轴器参数(联轴器轴孔长度、轴孔直径、联轴器外直径、边缘厚度)和减速机参数(减速器输入输出轴直径、输出轴长度、箱体直径)等猴车驱动装置的信息参数。用户可以将相关参数信息输入,该系统判断所输入的信息是否符合参数要求,若不符合,则会返回页面提示“参数信息错误请重新输入”;若参数信息符合参数要求,则会生成猴车驱动装置的二维图形和三维模型的模拟图[11]。
1.4 驱动装置二维图形和三维模型生成方法
驱动装置的信息参数通过VB可视化编程语言[6]生成并保存到数组中,生成保存为.net和.3dt的格式,利用蓝光数字矿山软件系统生成基于读入参数信息的驱动装置的二维图形和三维模型[12-13]。
绘制驱动装置的二维图形时,首先分析提取相关参数,然后调用系统底层的图元函数生成二维图形。在绘制图形时,选取水平向右为x轴正向,水平向下为y轴正向,首先需要选取合适的点作为基准点并确定正确的比例,根据基准点确定图形元素的位置以便准确进行图形绘制,在绘制过程中准确计算组成各部件所需的对角点坐标调用矩形图元函数,起点终点坐标调用直线型图元函数,圆心坐标和半径调用圆图元函数等完成绘制,绘制完成后必须对图形进行文本标注。
绘制驱动装置的三维模型时,首先设置所需装置的参数信息,然后根据参数信息调用基本实体建模的可执行程序,设置相应的路径并保存为.3dt格式。在此过程中,可以通过建立模块定义公有过程为系统私有过程所调用。三维模型在空间中选取水平向右为x轴正向,水平向前为y轴正向,竖直向上为z轴正向。以绘制猴车驱动装置中制动器的三维模型为例,首先提取出参数信息:制动器制动臂长(z_zdb_l:mm)、制动臂间距(z_ju_c:mm)、液压推动器直径(z_tdq_d:mm),然后需要选取一个合适的基准点来构建三维模型。三维模型绘制中需要找准点、面、体之间的关系,体由若干个面构成,面由若干个点组成,因此找准元素体对应的点坐标极其重要,在构建过程中还可以调用包括长方体、圆柱体、三维旋转、环形阵列、移动、实体扫掠等实体函数参数。在三维空间中调整x轴、y轴、z轴的旋转角度便可绘制出猴车驱动装置的三维模型[14]。
2 猴车驱动装置实现
根据对猴车驱动装置系统的分析,用VB可视化编程语言实现二维图形和三维模型参数设计,借助于蓝光数字矿山软件系统生成驱动装置的二维图形和三维模型的模拟图,用户只需要输入相应的参数信息,即可生成二维图形(.net格式)和三维模型(.3dt格式)。
2.1 猴车驱动装置各部件实现
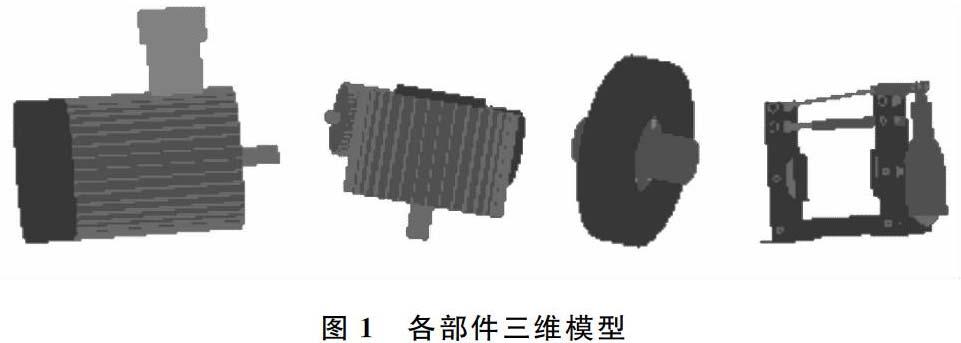
在此猴车驱动装置系统中,用户只需输入参数信息,然后点击驱动装置参数设置窗体中生成电动机三维模型、制动器三维模型等按钮,保存.net和.3dt的格式,然后用矿山数字信息平台[15-16]分别打开即可得到所需的二维图形和三维模型。各部件三维模型如图1所示。
2.2 猴车驱动装置整体装配
对于猴车驱动装置,各部件生成完成后需要进行整合,以成为完整的驱动装置。对于猴车驱动装置的装配,首先需要选取合适的零部件,然后进行连接,电动机的中心轴连接联轴器的主动半联轴器的轴孔,联轴器的从动半联轴器连接减速机的输入轴等。在此过程需要注意如下问题:①在驱动装置设计中需要准确提取相应参数(电动机轴直径、联轴器轴孔直径等)以便实现驱动装置的精准装配;②需要准确计算元素体点的坐标。各部件的装配可以通过三维旋转、移动、阵列等实体函数来实现。基本实体函数如下:
3 结语
猴车驱动装置系统可以使用户输入参数信息并读入预先生成的驱动装置信息文件,即可查看所生成图形,此系统不仅可以生成三维模型,还可以选择性地生成所需要的二维模型。由于该系统对于驱动装置完成装配所需参数要求严格,因而在参数提取上还有待优化。
参考文献:
[1]黄光亮,聂书奎.架空乘人装置的选型与应用[J].矿山机械,2013,41(12):136-138.
[2]王敬冲,王大虎,刘海洋.井下架空乘人装置三维可视化及虚拟仿真研究[J].矿山机械,2015,43(6):113-114.
[3]易炳刚.带式输送机驱动装置三维参数化选型系统设计与研究[D].太原:太原科技大学,2011.
[4]王瑞霜,杨伟光.有底柱阶段自然崩落法系统的设计与实现[J].计算机技术与发展,2014,12(12):176-178.
[5]卢新明,尹红.数字矿山的定义、内涵与进展[J].煤炭科学技术,2010,38(1):48-52.
[6]龚沛曾,陈慰民,杨志强.Visual Basic程序设计简明教程[M].第2版.北京:高等教育出版社,2003:227-238.
[7]王眉林,冯维钧,高建荣.高速架空乘人系统应用研究[J].中国煤炭,2005,31(6):44-45.
[8]罗贤峰.煤矿架空乘人装置设计与应用[D].成都:电子科技大学,2012.
[9]葛玉柱.矿用架空乘人装置液压传动系统研究[D].长沙:中南大学,2009.
[10]王晶,方春峰.浅析蓝光软件在矿图中的应用[J].煤矿现代化,2009(5):91-92.
[11]陈世明,何丽菊.架空乘人器系统技改及自动保证装置在龙潭矿井的应用[J].煤矿机械, 2011,32(5):160-161.
[12]吴兆法.基于蓝光软件的王家岭煤矿三维组态平台建设[J].煤矿现代化,2015(6):79-83.
[13]余民姚.单轨吊钻锚一体机驱动装置的设计研究[J].煤矿机械,2014,35(4):10-12.
[14]刘小琴,葛正浩,曹鹏.基于VB6.0和Pro/E的圆柱分度凸轮三维参数化实体建模[J].机械传动,2015,39(9):97-98.
[15]田文涛,贺小华.基于VB技术的SolidWorks二次开发与应用[J].计算机工程与科学,2009,31(7):65-67.
[16]万力.基于地理信息整合的青东矿数字矿山系统构建与应用[J].科技创新与应用,2014,33(11):293.
[17]王晓政.驱动传动装置中数据采集与分析方法的设计与实现[D].哈尔滨:哈尔滨工业大学,2014.
(责任编辑:孙 娟)
猜你喜欢
求知导刊(2016年36期)2017-03-03
电脑知识与技术(2016年28期)2016-12-21
电脑知识与技术(2016年26期)2016-11-24
考试周刊(2016年49期)2016-07-05
科技视界(2016年13期)2016-06-13
中国教育信息化·基础教育(2016年3期)2016-06-07
中国市场(2016年7期)2016-03-07
科技视界(2016年4期)2016-02-22
科技资讯(2015年19期)2015-10-09
科技视界(2015年25期)2015-09-01