
红外线阵探测器数字图像校正的改进
2016-05-14 21:38周娟彭垚
数字技术与应用 2016年7期
周娟 彭垚

摘要:传统的两点定标非均匀校正算法可以解决红外线阵探测器像元响应率等的偏差。针对工程应用中光电红外搜索跟踪系统的孔径光阑与红外线阵探测器冷阑不匹配引入的杂散光现象,在传统的基于红外线阵探测器的两点定标非均匀校正算法基础上, 将其扩展为基于整幅数字图像的面阵型非均匀校正方法。通过这一改进, 光电红外搜索跟踪系统杂散光现象造成的数字图像非均匀性得到改善,图像质量得以提高。
关键词:红外线阵探测器 图像 非均匀性 校正
中图分类号:TN215 文献标识码:A 文章编号:1007-9416(2016)07-0061-02
近年来,红外探测在军事和民用领域都得到了广泛的使用。在军事上广泛应用于搜索跟踪、火力控制、制导和监视等方面;在民用上主要用于测温、成像、医疗诊断和防盗安全等方面。
红外线阵探测器探测器采用扫描方式成像,受现有技术和工艺限制,探测器各像元之间响应率存在一定的偏差, 这将导致输出图象呈现条纹分布,这种图象的不一致性在红外波段表现比较明显, 故被称作红外图象的非均匀性。除探测器各像元响应率偏差外,红外图象非均匀性还与光学系统、处理电路、工作时间、工作环境、目标和背景温度等因素有关。
在光电搜索跟踪系统中,传统的两点定标非均匀校正算法可以很好地解决红外线阵探测器像元响应率偏差、处理电路偏差以及工作环境、目标和背景的适应性。但在工程应用中,光电搜索跟踪系统的孔径光阑与红外线阵探测器冷阑往往不能良好匹配,容易引入杂散光,采用传统的两点定标非均匀校正算法很难解决这一问题。
本文提出了一种改进型的红外线阵探测器非均匀校正方法,可以解决光电搜索跟踪系统的非均匀性问题,提高成像质量。
1 非均匀性校正算法
目前国内外的非均匀性校正算法可分为两类,一类是基于定标的校正算法, 包括常用的一点校正、两点校正、多点分段线性校正等。这种方法原理简洁、校正精度高、实时性好、易于实现和集成, 被普遍采用。
另一类是基于场景的自适应校正算法, 这种方法能够根据场景信息对校正的增益和偏置系数及时进行修正和更新,在一定程度上可以克服探测器像元响应随时间和环境温度等因素的改变带来的校正误差。
但是基于场景的算法需要存储先前的图象, 且计算的复杂性增加, 实际应用中存在一定的局限性。因此,目前应用较多的仍是两点法和在此基础上改进而来的多点分段非均匀性校正法。
1.1 两点温度定标校正法原理
两点定标校正算法是建立在探测器像元特性为线性定常的前提下的, 外界辐射与焦平面各像元输出之间呈线性关系:
(1)
式(1)中为像元输出的电信号,为像元的响应率,为入射红外辐射,为像元的偏置。
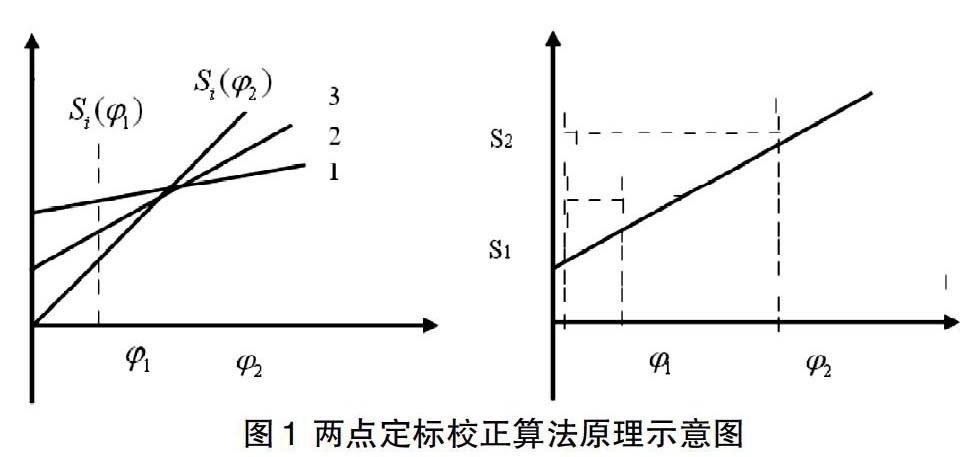
图1为两点定标校正算法的原理示意图,横坐标表示入射到探测器上的红外辐射,纵坐标为输出的电信号。直线1和直线3分别代表探测器两个像元的响应特性,直线2为所有探测器像元校正后的响应特性。两点定标校正算法就是将所有探测器单元的响应特性曲线变换为同一条响应特性曲线。它的物理意义在于:在均匀的辐射输人情况下,在完成针对各个像元的响应率和偏置校正之后,探测器各像元的输出电信号相同,从而消除了红外图象的非均匀性噪声。
校正的具体方法为:实验室黑体温度分别在两个标定温度点T1和T2时, 获得两组红外焦平面原始数据,和,两个校正后的输出为和。其中表示焦平面中各像元,则有:
(2)
通过式(2)计算得到校正的增益和偏置系数,其结果如式(3)所示:
(3)
式(3)中关键是和的确定。由于它要反映所有像元对一定辐射的一致响应值,所以一种比较常用的做法是取在该温度下,所有像元辐射响应输出的平均值,即:
(4)
式(4)中,n为探测器像元的个数
当红外线阵探测器接收到实际目标场景辐照度时,利用以上所得到的各探测器像元的相应校正值对其输出进行实时校正,如(5)式:
(5)
式(5)中,为实验室得到的线阵探测器第个像元的增益,为第个像元的实时响应信号,为探测器第个像元的偏置,为第个像元的校正后的输出信号。
1.2 校正算法分析
两点定标校正算法对偏置进行补偿的同时对增益系数也作出了校正, 其校正具有一定的动态范围, 在两个定标点之间校正效果良好。两点校正算法除需要定标以外, 对景像的内容没有任何要求, 这种方法的优点是计算量小, 便于实时实现。但是在实际应用中, 各探测器像元的响应通常呈非线性, 加上系统噪声和时间漂移等因素,尤其在辐照度变化范围较大时, 其线性度更差。因此, 实际工程应用中, 校正方法必须作适当改进。
2 光电红外搜索跟踪系统成像分析
在军事上,光电红外搜索跟踪系统通常采用制冷型红外线阵探测器。空间红外信号经扫描后通过光学系统聚焦在探测器焦平面上,焦平面上的感光像元将红外光换转换成电信号,通过A/D采样变换成数字信号送信号处理电路进行非均匀性校正、消瞎元等处理后,一路以模拟视频方式输出显示,一路以数字视频方式送后级图像处理板进行处理。
制冷型红外系统100%的冷光阑效率是光学设计中需要努力实现的目标,即要保证系统的孔径光阑与探测器的冷阑匹配,使探测器只能看到物空间,避免杂散光进入探测器。
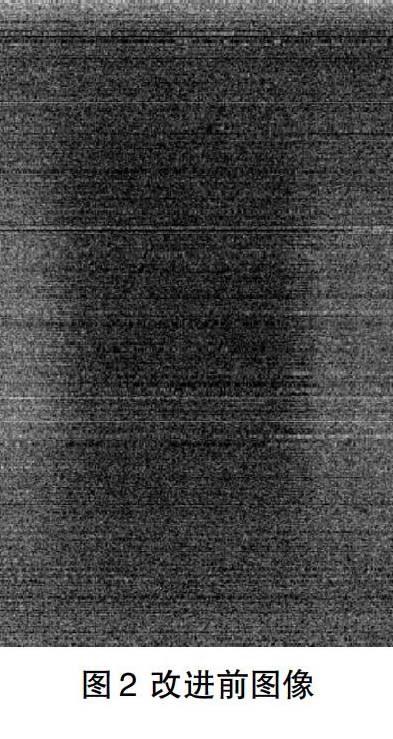
在红外搜索跟踪系统光学设计中,设计者将系统的孔径光阑设置在探测器冷阑处,理论上保证了100%冷阑效率。但在工程实际中,由于调焦、光学装调以及光学、机械公差累积等因素使系统的孔径光阑与探测器冷阑不能完全匹配,致使系统内部的一些辐射(杂散光)照射到探测器的焦平面上,在四周区域形成一个“亮框”,成为固定的图像干扰,传统的基于线阵探测器的两点定标非均匀校正算法无法解决这一问题。
图2为均匀背景条件下光电红外搜索跟踪系统使用改进前的两点定标非均匀校正算法后的输出图像画面,存在“亮框”现象。
3 改进型算法
针对光电红外搜索跟踪系统成像这一“亮框”问题造成的图像不均匀,本质上应从光学系统方面来着手解决。但由于光学系统设计、加工及生产周期长且成本高、装调复杂,所以可以通过设计采用一种新型的非均匀校正方法从软件方面着手来解决这一问题。
由于系统“亮框”现象是固定的图像干扰,所以可以将目前的基于线阵探测器的两点定标非均匀校正方法扩展为基于整幅图像的面阵非均匀校正方法。其基本原理是:利用两点定标非均匀校正方法得到探测器各像元的增益后,在均匀背景条件下对多帧图像原始数据实时按点进行累加后求平均从而得到图像每个点的原始数据平均值,则有:
(6)
式(6)中,为上一幅图像所有原始数据的平均值,为实验室黑体温度分别为T1和T2时测量得到的线阵探测器各像元的增益,则为面阵非均匀校正方法下得到的基于图像每个点的增益(其中,i为红外线阵探测器的像元个数,n为图像数据的个数)。
当红外线阵探测器接收到实际目标场景辐照度时,利用公式(6)所得到的图像每个点的增益对其输出进行实时校正,如(7)式:
(7)
式(7)中,为图像第个点的实时响应信号,为图像第个点的校正后的输出信号。
经过以上面阵非均匀校正算法处理后,系统图像杂散光这一问题在图像校正阶段通过对偏置系数进行补偿后,将“亮框”现象消除。
图3为均匀背景条件下系统使用改进后的面阵非均匀校正算法后的输出图像画面,“亮框”现象消除,图像均匀性得到改善。
4 结语
红外线阵探测器是光电搜索跟踪系统的核心组件之一,其主要功能是采集空间红外信息,经过非均匀校正等处理后输出可供后级处理的红外图像,其图像质量的好坏直接影响后级图像处理组件对目标的识别能力,直接影响光电搜索跟踪系统的探测和跟踪性能。
本文中提出了一种针对光电搜索跟踪系统使用红外线阵探测器的改进型非均匀校正算法, 并且在现有光电雷达系统中进行了图象校正试验, 取得了良好的试验效果,成功地解决了工程应用中光电雷达系统的孔径光阑与红外线阵探测器冷阑不匹配造成的杂散光现象,使图像非均匀性得到改善,图像质量得以提高。
参考文献
[1]查鹏,沈学民,危峻,红外线阵探测器非均匀性校正的DSP实现.科学技术与工程,2005(23):1832~1834.
[2]石岩,张天序,李辉,曹治国.一种考虑红外焦平面器件非线性响应的非均匀性校正方法.红外与毫米波学报,2004,23(4):251~256.
[3]周慧鑫,王炳健,刘上乾,拜丽萍.红外焦平面器件非均匀性校正数字实现.系统工程与电子技术,2004,26(1),130~132.
[4]钟云,孙娟.红外焦平面技术发展概况.红外技术,1991,13(6),1~6.
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17
成都信息工程大学学报(2021年2期)2021-07-22
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
作文小学中年级(2020年6期)2020-07-24
中国医学影像学杂志(2018年9期)2018-10-17
数学物理学报(2017年6期)2018-01-22
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
中医文献杂志(2014年6期)2014-02-28
电子设计工程(2014年18期)2014-02-27
