
基于模糊神经网络的缠绕机伺服系统设计
2016-05-11 06:01薛增涛赵俊楠
河北省科学院学报 2016年1期
薛增涛,赵俊楠
(河北科技大学 电气工程学院,河北 石家庄 050018)
基于模糊神经网络的缠绕机伺服系统设计
薛增涛,赵俊楠
(河北科技大学 电气工程学院,河北 石家庄050018)
摘要:缠绕机是生产玻璃钢管的必要设备,文中论述了缠绕技术、规律和控制系统的需要,以Trio运动控制器为基础,设计了缠绕机伺服控制系统。以导丝头为控制主要对象,主轴应用全闭环速度控制,导丝头应用半闭环位置控制。因此,组成了基于模糊神经网络的玻璃钢管缠绕机控制系统([1])。
关键词:运动控制器; 缠绕机; 模糊神经网络
1玻璃钢管缠绕机的伺服系统构成
螺旋缠绕是玻璃钢管缠绕机一种重要缠绕方式, 最大的控制难题是以缠绕角不变为前提,主轴与小车之间速度保持一个固定比例关系, 而且需要对相关参数不断进行调试。夹砂玻璃钢管缠绕机的伺服控制系统主要组成部分有:(1)芯模主轴控制系统,运用交流电机进行拖动,用于驱动主轴做匀速自转运动。(2)小车系统,由交流伺服电机拖动, 控制小车在床身上沿平行于主轴方向做来回重复运动。而且,主轴和小车需要一个固定速度进行跟随运动, 如此,玻璃纤维主轴上才能实现纤维的均匀排布,才能达到生产工艺的标准要求。(3)计算机控制系统:由工业控制计算机组成上位机和Trio运动控制器组成下位机,该系统是分布式控制结构,用户可以根据实际需要对控制系统进行设定工艺参数和缠绕线型参数, 从而实现玻璃钢管道的工业生产和纤维缠绕的智能控制[2]。控制系统框图如图1所示。

图1 控制系统框图
2基于模糊神经网络的控制原理
玻璃钢纤维缠绕是一种延迟,非线形控制,主轴上的芯模的偏心度相差很大, 外部环境和负载的影响各不相同, 因此,主轴选择交流变频调速控制,小车系统选用伺服控制具有动静态性能差异大, 外部工作环境条件差,各种干扰不确定等因素。所以现实中控制过程复杂多变,建立准确的动态数学模型非常困难。
为了确保玻璃钢管道的质量,玻璃钢纤维缠绕必须稳定可靠,则控制系统需要严格确保芯模转角与小车与主轴恒定速比的稳定运动关系,因此两个轴的协调控制非常严格。所以,对于本系统的控制方法,不但要有良好的跟踪性能,高标准的精确性,而且还需要具有抑制各种各样不确定的干扰因素对系统的影响和良好的鲁棒性。因而,伺服控制系统选用模糊神经网络控制器,实现对小车的位置控制和跟踪[3]。
2.1模糊神经网络控制器
模糊神经网络控制器具有模糊控制器的优点,合理采纳经验知识、预估推理性能好,而且拥有神经网络控制器的优点,能够从数据中自主学习知识、学习性能优良,在小车位置伺服系统中采用此方法能取得很好的控制效果。
在模糊控制过程中,“模糊化”、“模糊推理”、“反模糊化”组成了模糊推理的整个过程,因此,应用向神经网络来实现模糊推理是一种合理的选择。模糊控制器与前向网络拥有一样的输入和输出,采用适当学习算法来改正和调试控制器内部参数。本系统的伺服位置控制的模糊神经网络控制器釆用多层前向网络构造模糊集、隶属度函数和模糊推理控制模型,网络权值进行不断的调整改正,从而使隶属度函数、模糊规则不断改变。模糊神经网络结构如图2所示。
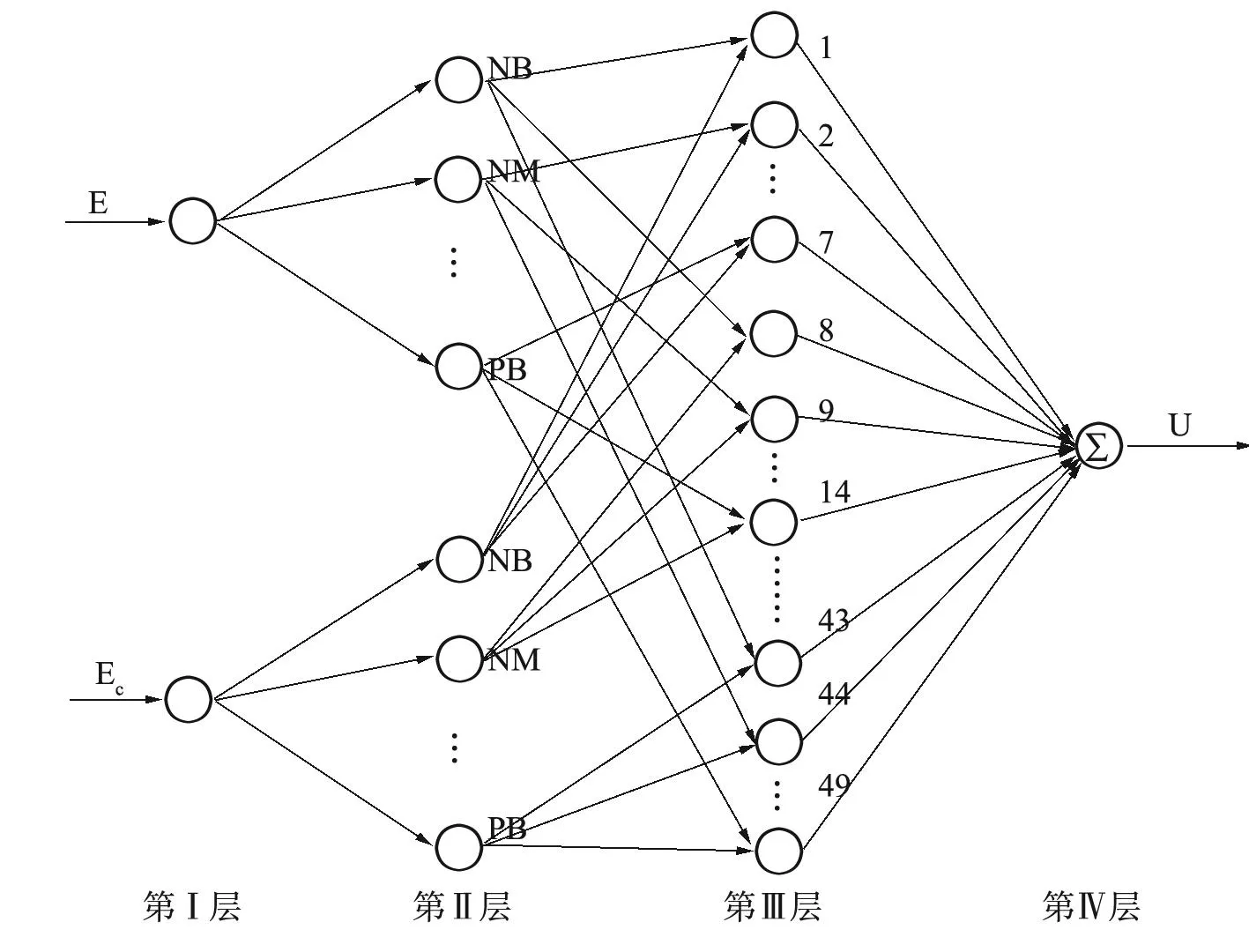
图2 模糊神经网络结构图
图2中,模糊神经网络控制器构成是四层网络结构。第I层的节点拥有两个神经元;第II层一一对应输入变量的模糊集;第III层是实现模糊控制推理,独立神经元拥有一条单独的模糊控制规则;第IV层是输出层为模糊推理的结论部分,包含各个神经元的输出,形成一个神经元的总输出。本系统论述是单一变量控制系统,模糊控制器采用单一元素集模糊化,选用高斯型隶属函数。
2.2模糊神经网络的学习算法
模糊神经网络控制器组成中,连接权值wk、隶属度函数的中心值aij和隶属函数宽度bij是重要参数,需要不断地学习。模糊神经网络结构是一种多层前向网络结构的典型代表,因此可以模仿神经网络的误差反传算法来调整参数的学习算法[4]。
由上诉可知FNNC中各参数的学习算法为:
aij(t+1)=aij(t)+η1·Δaij(t)
bij(t+1)=bij(t)+η2·Δbij(t)
wk(t+1)=wk(t)+η3·Δwk(t)
3控制系统的仿真与结果分析
仿真结果表明, 采用模糊神经网络控制的控制系统具有较好的动态和静态性能, 优于传统结构的控制器。
输入信号r=1时的阶跃响应信号见图3和图4。
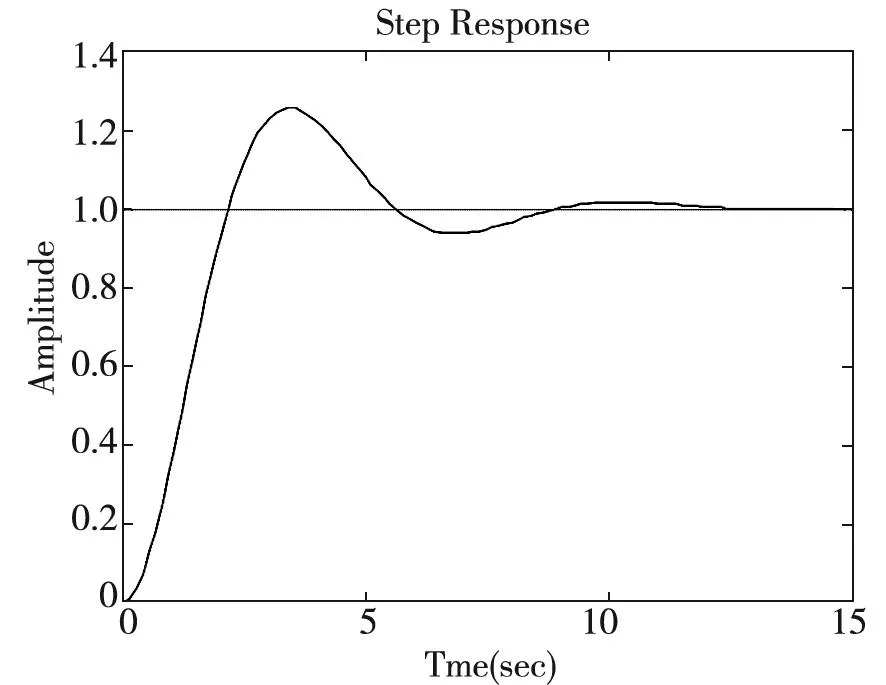
图3 PID控制仿真
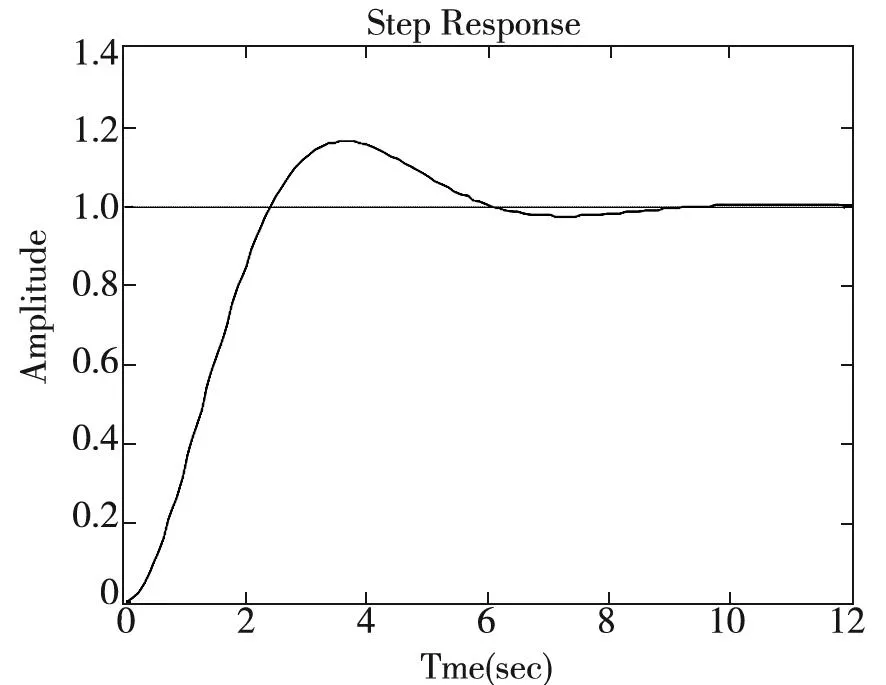
图4 模糊神经网络控制仿真
实验结果表明模糊神经网络控制在稳态性能和动态性能上控制效果都优于传统PID控制,FNNC对于处理一些具有非线性、延迟性、或者扰动特性发生变化的控制问题时,具有优良的控制性能和控制效果。
4结语
以Trio运动控制器为基础,该玻璃钢纤维缠绕系统采用了模糊神经网络控制算法,实现了伺服系统良好的快速性和高精度的跟踪性,使玻璃钢缠绕过程更加平稳,缠绕线型精确可靠,大幅度的提高了工作效率和产品质量。
参考文献:
[1]尹秀云,杨德旭,等.三轴纤维缠绕机自动控制系统的设计[J].工业控制计算机,2006,19(9):27-28.
[2]徐东亮,吴耀楚,刘雪红.纤维缠绕张力微机控制系统[J].武汉理工大学学报,2003,25(10):71-73.
[3]安连祥,李军华.玻璃钢缠绕控制系统的设计[J].控制工程,2002,(5):47-48.
[4]张乃尧,阎平凡.神经网络与模糊控制[M].北京:清华大学出版社,1998.
Design of winding machine servo system based on fuzzy neural network
XUE Zeng-tao,ZHAO Jun-nan
(SchoolofElectricalEngineering,HebeiUniversityofScienceandTechnology,ShijiazhuangHebei050018,China)
Abstract:Winding machine is necessary equipment for the production of glass pipe, This paper discusses on the winding technology, law and the needs of the control system.On the basis of price movement controller, winding machine servo control system is designed. With the guide wire head as the main object, the main application full speed closed-loop control, application thread head half closed loop position control. Therefore, form the glass steel pipe winding machine based on fuzzy neural network control system.
Keywords:Motion controller; Winding machine; Fuzzy neural network
中图分类号:TP183
文献标识码:A
文章编号:1001-9383(2016)01-0031-04
作者简介:赵俊楠(1990-),男,河北秦皇岛人,硕士研究生,研究方向:过程参数检测与智能控制技术.
收稿日期:2016-02-29
