
基于车载检测的列车轮对踏面擦伤故障诊断研究
2016-05-11 03:32向伟彬贺德强刘建仁陈桂平
广西大学学报(自然科学版) 2016年2期
向伟彬,贺德强,苗 剑,刘建仁,陈桂平
(1.广西大学机械工程学院, 广西南宁530004; 2.南宁南车轨道交通装备有限公司, 广西南宁530021)
基于车载检测的列车轮对踏面擦伤故障诊断研究
向伟彬1,贺德强1,苗剑1,刘建仁2,陈桂平1
(1.广西大学机械工程学院, 广西南宁530004; 2.南宁南车轨道交通装备有限公司, 广西南宁530021)
摘要:为确保高速列车的行车安全,需实时监测列车轮对的运行状态,提出了基于惯性基准法的车载轮对几何参数的检测方法,并在此基础上设计了基于粗糙集理论(RS)和支持向量机(SVM)的轮对踏面擦伤故障诊断模型,对轮对踏面进行状态监测与故障诊断。整个故障诊断方法为:首先利用传感器组采集轮对几何参数,将采集数据用时间对准算法进行对准;然后将对准数据进行小波包分析、构造故障特征集;再用粗糙集理论进行属性约简,提取特征集,消除冗余信息;最后使用支持向量机构建故障诊断模型进行故障分类,从而实现轮对踏面擦伤故障实时诊断。MATLAB仿真分析表明,使用该故障诊断方法构建故障诊断模型时间短(为0.226 633 s),诊断准确率高,达100%,取得了较好的诊断效果。文中所用方法也可以推广应用到如轨道交通、船泊、采矿等有旋转体并需要进行实时数据采集、状态监测与故障诊断的领域。
关键词:轮对几何参数;粗糙集(RS);支持向量机(SVM);故障诊断
0前言
轮对作为机车重要的走行部件,承载着机车的全部重量并提供行走动力与制动力,同时也是故障高发部位,在列车向高速重载方向发展的大背景下,如何减少车轮磨耗,加强预防保护措施,确保轮对几何外形参数的检测精度显得愈来愈重要[1-2]。目前国内外轮对故障的研究方法主要有:专用卡尺法、平行四边形机构测量法、振动加速度法、超声遥测法、磁粉探伤法、涡流法、加速度峰会评法、图像法、光电检测法等[3]。现有的轮对几何参数检测方法以地面检测居多,车载检测方法的研究却较少。随着我国高速铁路的飞速发展,轮对几何参数的地面检测方法的短板有:①受检测场地的限制,致使列车必须在检测区域才能完成检测,不能良好的检测行进在非检测区域时发生的故障,对引起在途列车发生“非正常停车”因素的不可预知性,甚至列车“脱轨”等重大事故发生前都无法预测;②检测的非实时性问题也很突出,数据处理是在地面进行的,而处理后的数据量也较大,必须要依赖其他传输方式上传到列车控制端,周期比较长,导致效率低下等问题逐渐凸显出来。故及时准确的发现列车轮对踏面各种故障,减少列车在线停靠等事故的发生,提高检修的质量,正是车载检测方法的研究所在。本文提出的基于车载检测装置的列车轮对踏面擦伤故障诊断研究方法,所有步骤都是在车载环境下完成,是集数据采集、数据处理与故障判别于一体的故障诊断体系,减少了对远程帮助的依赖,对指导列车安全运行有重要意义,为探索更优的检测诊断方法提供新方向。
1国内外轮对几何参数检测现状
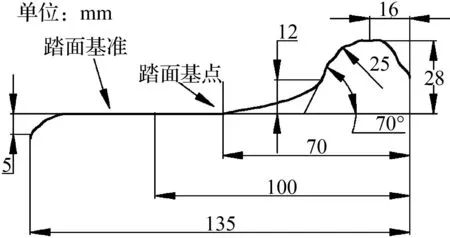
图1 轮对外形示意图Fig.1 Schematic diagram of wheelset profile
目前轮对外形的各几何参数,都是以距轮缘内侧面70 mm处踏面上的一点作为基点来定义并测量的,具体位置如图1所示,而这个测定基点曾是轮缘顶部(点)[4-5]。可知各检测方法,都直接或间接的对这个基点有较大的依赖性,如果基点定位不准,可直接影响测量数据的准确性与检测结果的精度,甚至导致测量的失败。
轮对外形各几何参数的主要测量方法分为接触式测量和非接触式测量两大类[1]。接触式测量需要其测量仪器与被测表面接触,优点是测量精度高,对所测工件表面粗糙度等的包容性较大,且能适应恶劣的检测环境等[6-7];缺点是易于磨损精准的测头,导致误差增大,影响测量效果,且效率较低,如各车轮外形检查量具[8]、车轮模板检查器[9]、铁道车辆车轮第四种检查器[10]等各种机械量具,现在都已很少使用,取而代之的则是电子量具[5]。非接触式测量则主要是应用电子量具来实现的,其主要原理是单独利用摄像机或结合相应传感器等光电技术和数字图像技术来获取当前进入特定检测区域轮对的情况,或直接成为图片,或转化成相应信号,进而与标准的数据库进行对比分析,找出其中的轮对几何参数缺陷,以达到测量与检测的目的[11-15]。
2车载轮对几何参数检测方法的建立
车载检测是在行进的车上安装仪器设备,以惯性基准法为原理,结合多种传感器使用而建立起来的动态惯性基准检测。以前考虑到车载检测对相应装载检测设备要求非常高,数据处理速度快,而单套检测设备系统价格昂贵,检测精度难以满足要求,故此类研究受到诸多限制[5]。近年来,相关检测设备得到较大发展,已能达到车载检测的各项要求,国内外学者在列车提速的大背景下,又逐渐投身到了车载检测的研究队伍中。在此背景下,本文提出了用激光扫描传感器与振动加速度传感器等相结合的方法来检测轮对几何参数的变化,相比其他方法,激光传感器能较少的受到外界因素的影响。
2.1以偏转激光位移传感器为主的轮对检测
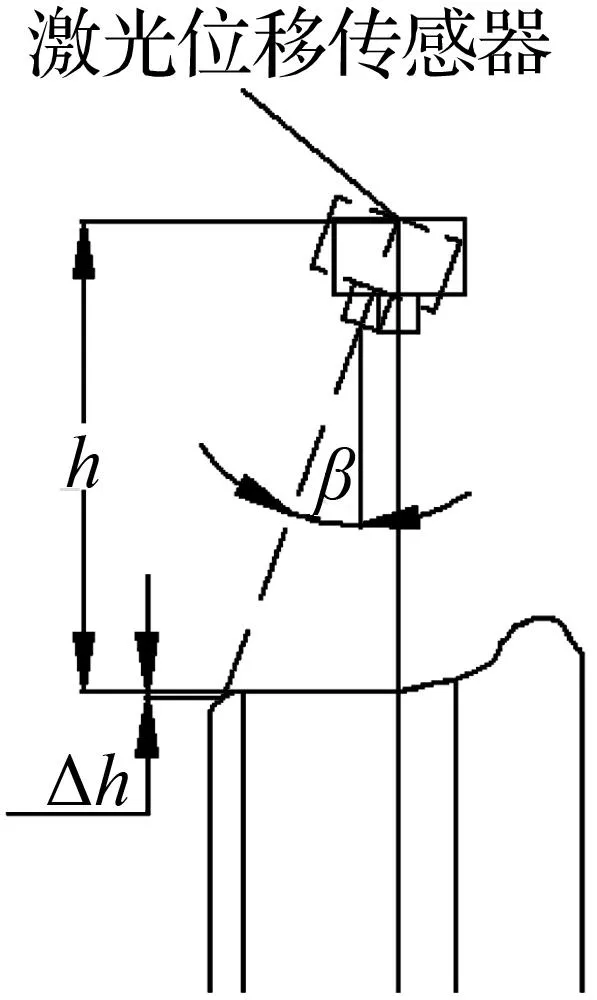
图2 偏转激光位移传感器检测装置Fig.2 Detection device of deflection of laser displacement sensor
把激光位移传感器安装在轮对滚动圆上方的一定距离h处,以传感器偏转一定角度的方式来达到测量轮对外形各几何参数的目的。具体示意图如图2所示。
则检测得到的轮对轮廓点距激光位移传感器的距离如公式(1)所示:
l=(h+Δh)/cosβ-s,
(1)
其中,s表示传感器本身的长度,Δh表示轮对轮廓点与滚动圆垂直距离变化量,β为激光位移传感器的偏转角度。
激光传感器测量距离是采用的激光三角测量原理[16-17],由激光器发射一束激光经光学透镜后照射在被测物体上,漫反射光线被成像系统吸收形成物像斑点来完成测量。此种方法在原理上可行,但在实际操作中有一些困难。首先由于入射激光线与成像系统接收器几乎处于同一空间点上,故能被成像系统接收的漫反射光线并不多;加之轮对轮廓本身不规则,踏面与轮缘又在不断的被磨耗,使得被测表面非常光滑,造成Δh值难以精准确定,使此种测量方法的难度加大。这也在一定程度上制约了此测量方法的应用。
2.2以平移激光位移传感器为主的轮对检测
此种方法也是把传感器安装在轮对的滚动圆上方的一定距离h处,所不同的是传感器不进行角度的偏转,而是进行整体的以速度v做往复同周期平移运动[18],如图3所示,避免了角度偏转所带来的误差,则其测量表达式如公式(2)所示:
l=(h+Δh)-s。
(2)
但此方法依然存在一些不足,如速度v是由特定的机械传动装置带动,不可避免的引入了新的误差,造成测量结果的不准确。此外,随着轮对的旋转,难以保证被测点都在同一轮廓线上,造成了测量数据的偏移错位,使得轮对仿真结果出现扭曲,难以达到精确测量的目的。
2.3以激光扫描传感器为主的轮对检测
采用超高速激光扫描传感器进行轮对踏面的测量,该传感器采用蓝色激光,能很好的聚焦,并清晰成像,实现高精度测量。根据需要可选择不同的模式,采集特定点或面的坐标数据,而且很好的避开了基准面的定位问题,为进一步的数据运算提供可能。本文将采用这种方式进行测量,装置效果图如图4所示。
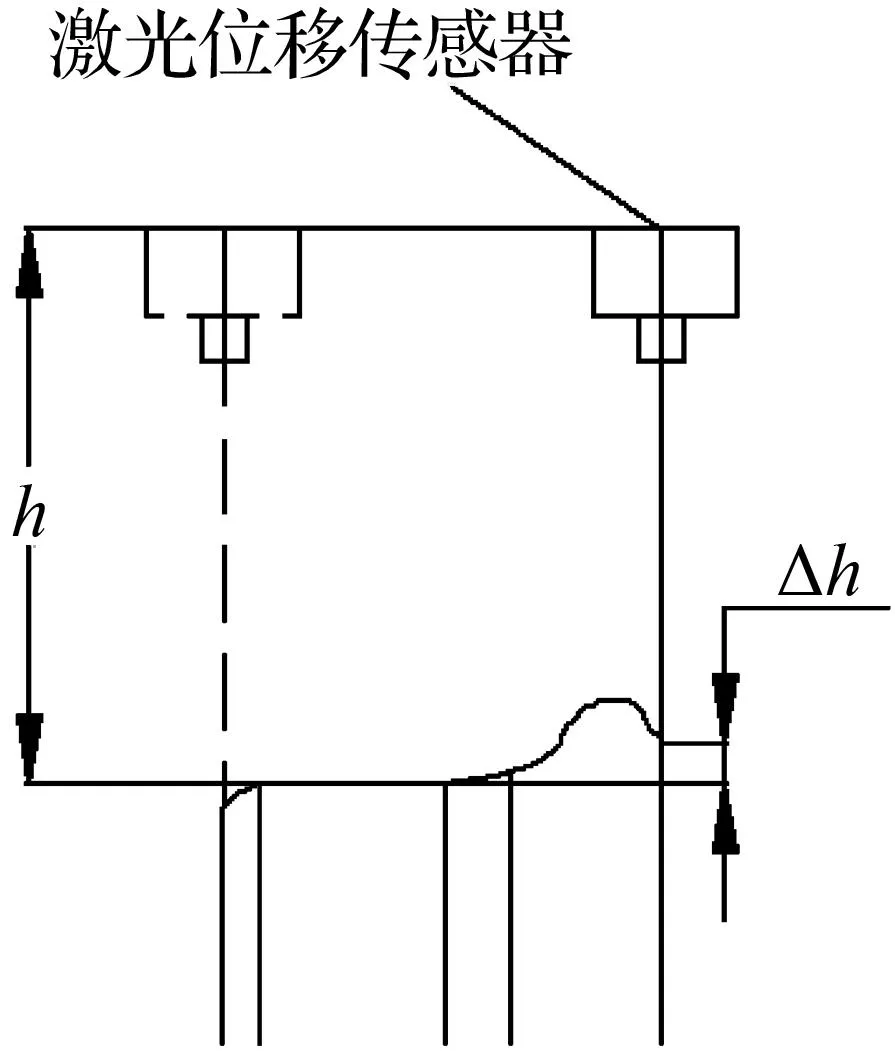
图3平移激光位移传感器检测装置
Fig.3Detection device of translation
of laser displacement sensor translation
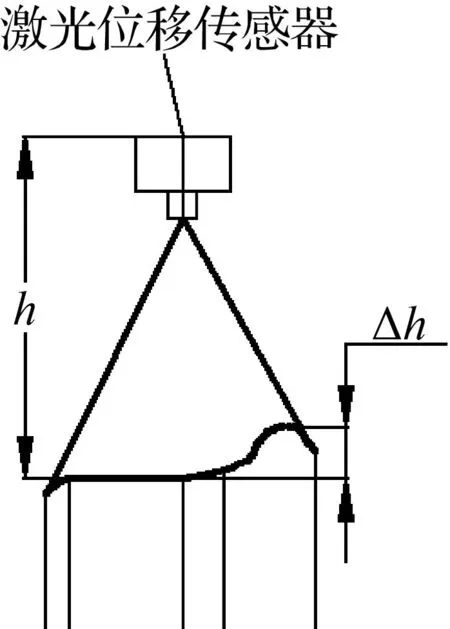
图4激光扫描传感器检测装置
Fig.4Detection device of
laser scanning sensor
由于在列车行进过程中会伴随着一定的振动,给测试结果造成一定的误差,为消除这种影响,可以在激光扫描传感器的上方,加装一个振动加速度传感器,如图5所示,以产生差模与共模信号。则测量轮对轮廓点距激光位移传感器的垂直距离表达式如公式(3)所示:
l=∬adtdt+(h+Δh)-s,
(3)
其中,a表示车体的振动加速度矢量。
鉴于两传感器的采样周期不同对检测精度造成的影响,故对两传感器的采集数据进行前期处理,即利用时间对准算法进行数据融合,得到精确的轮对几何参数[19]。传感器参数如表1所示。

表1 传感器参数
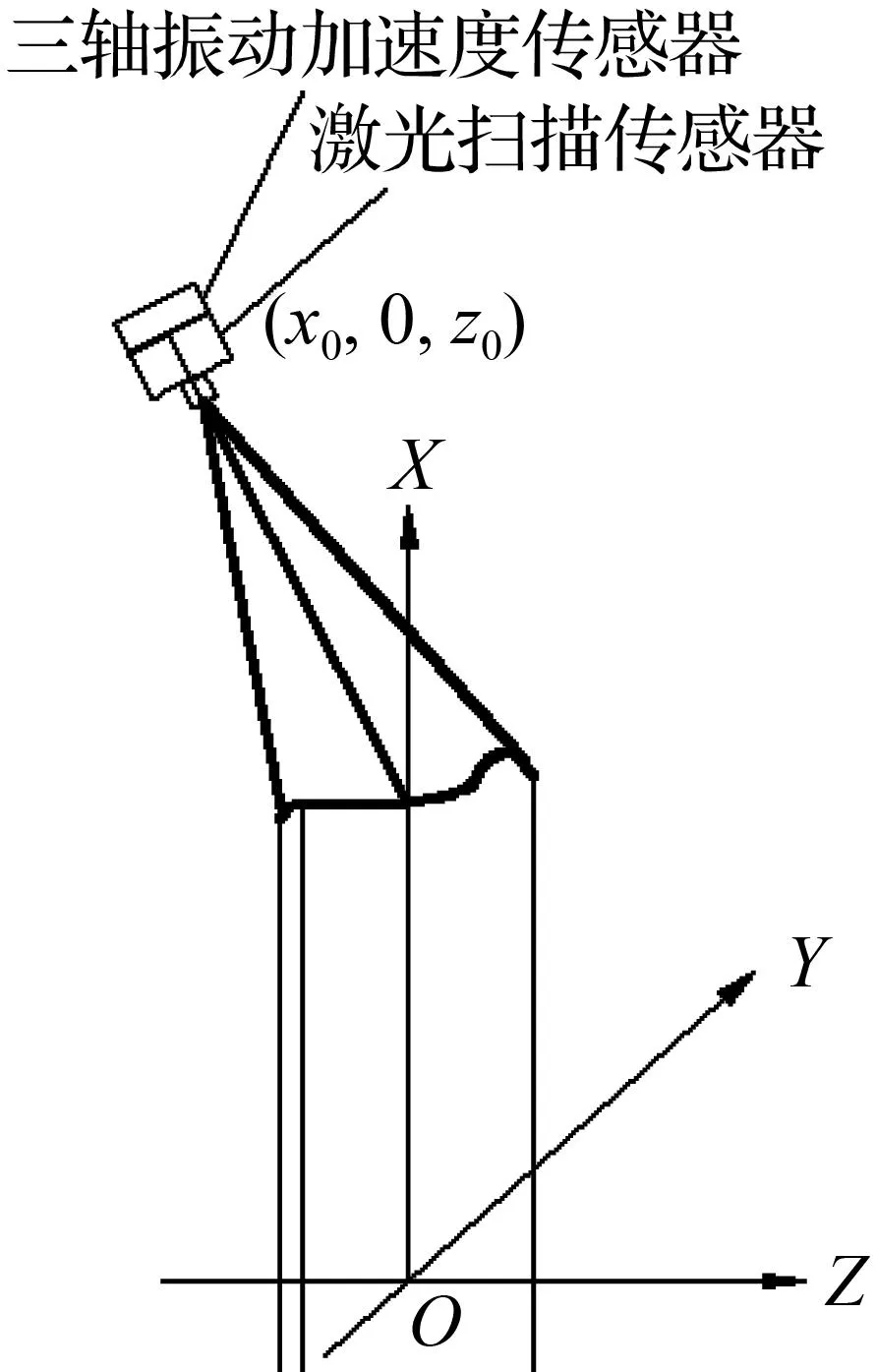
图6 偏置激光扫描传感器与振动加速度传感器检测装置Fig.6 Detection device of bias of laser scanning sensor and vibration sensor
轮对各轮廓几何参数的测量如图5所示,整合各数据,以轮对滚动圆的圆心为空间直角坐标系的原点,进行轮对的三维构建,以便更加直观的监测轮对故障。考虑到列车走行部结构复杂,轮对安装环境恶劣,结合列车实际运行情况,踏面磨耗情况不一,有针对性的重点监测磨耗严重的区域,如图6所示将传感器组进行远离转向架方向一定角度θ的偏转,便于安装并达到提高测量精度的目的。
综上所述,激光扫描传感器的数据处理表达式如公式(4)所示:
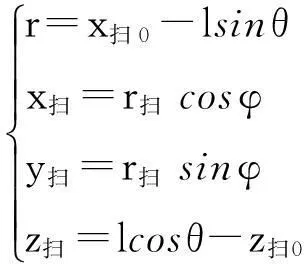
(4)
其中,θ为传感器与水平面的夹角,φ为轮对转过的角度值,a扫0=(x扫0,0,z扫0)为激光扫描传感器的初始坐标。
激光扫描传感器的数据处理公式如公式(5)所示:
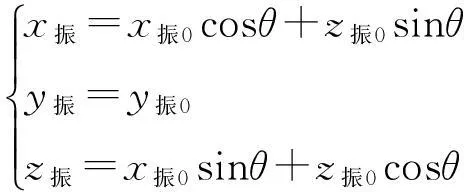
(5)
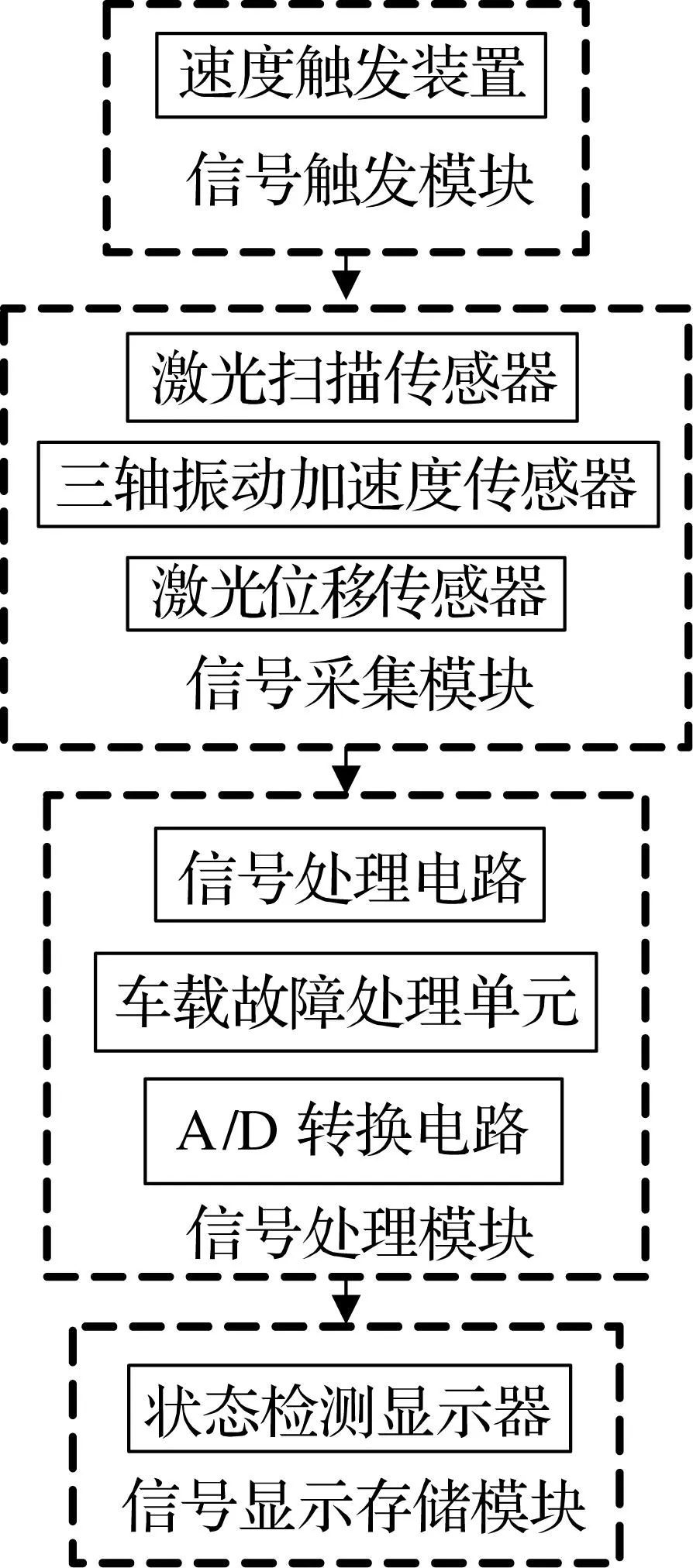
图7 检测系统组成框图Fig.7 Block diagram of detection system
其中,θ为传感器与水平面的夹角,a振0=(x振0,y振0,z振0)为激光扫描传感器的初始坐标。
利用公式(5)所得数据再和其他传感器数据进行矢量运算,即a=a扫+a振=(r,φ,z)。a的求出,为轮对三维图的绘制及故障监测与分析提供了基础。
因此,轮对几何参数检测系统主要由激光扫描传感器、振动加速度传感器等传感器设备以及相应的信号处理电路,A/D转换电路、车载故障处理等组成。具体的组成框图如图7所示。
3算法及仿真分析
为突出重点,本文重点分析轮对踏面擦伤故障。
本实验通过MATLAB进行仿真,采用小波包方法进行降维降噪和特征构造,然后使用粗糙集理论进行属性约简,提取特征,最后利用支持向量机方法对轮对踏面擦伤故障进行状态监测和故障诊断。
3.1相关理论分析
小波包变换是在小波理论上发展起来的更为精细的时频两域联合分析方法[20-21]。小波包分解算法如公式(6)所示[22-23]:
(6)
小波包重构算法如公式(7)所示[23-24]:

(7)
式中,hk-2l、gk-2l分别为小波包重构的低通、高通滤波器组。
粗糙集理论是由波兰数学家Z.Pawlak于1982首次提出来的,主要是用来研究一种不确定性与不完全的数学方法[24-25]。该处理方法最大的优势就是不需要任何先验知识,就能较准确客观的分析相关问题。属性约简是粗糙集理论的核心,其目的就是在不影响原有分类能力的基础上,删除掉一些不重要的或者不相关的冗余属性来达到化简的目的[26]。
支持向量机(support vector machine,SVM)是在统计学习理论的基础之上建立起来的新的机器学习方法,其模式识别类似于神经网络算法,但其优越性要明显高于神经网络,而且支持向量机具有很好的泛化能力,已表现出很多模式识别性能,被广泛的应用到许多工程实际问题中[27]。支持向量机(SVM)的基本思想是为解决二分类问题而提出来的,研究的是如何利用有限的样本(小样本)及经验数据进行学习的一种理论,具有很高的实效性[28]。由于惩罚因子和核函数参数对SVM有很大的影响,本文将采用粒子群优化算法,进行关键参数寻优。
3.2模型构建及分析
本文提出的基于粗糙集理论和支持向量机分类算法的轮对踏面擦伤故障诊断的流程如下:
首先对轮对踏面的拟合数据用小波包分解公式(6)(其中j=3)进行三层小波包分解,得到8个频率分量的信号,如公式(8)所示:
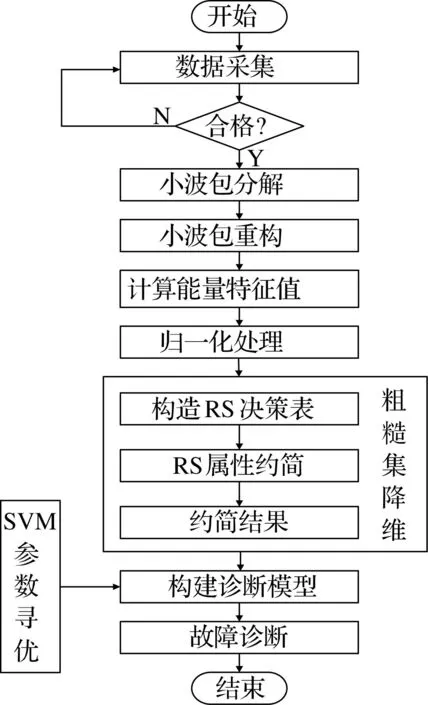
图8 基于粗糙集理论和支持向量机分类方法的具体诊断流程Fig.8 Specific diagnosis process of basedon rough set theory and support vector machine (SVM)classification method
(8)
再用小波包重构公式(7)对分解出来的频带分别进行信号重构,达到消噪的目的。最后用能量特征值公式(9)构造能量特征值,公式(9)如下所示:


(10)
构造出原始故障特征集,即为RS决策表,再应用属性约简的方法进行冗余信息的剔除,进一步缩小特征向量,以RS属性约简后的能量特征向量作为SVM输入,再用交叉验证的方法构建训练模型,以能量特征集的故障类型作为输出,从而构建轮对擦伤故障诊断模型。具体诊断流程如图8所示。

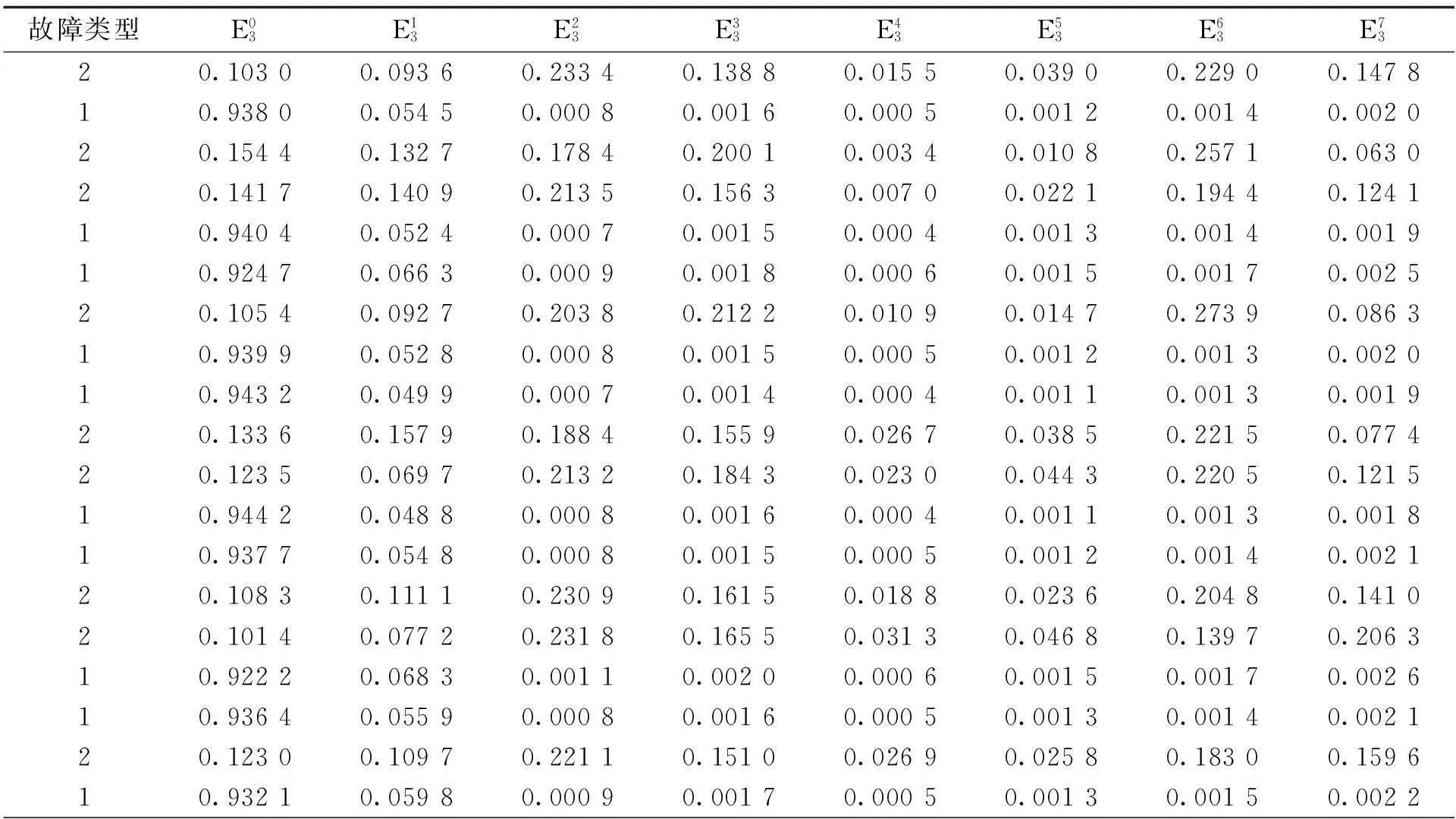
表2 原始故障特征集
续表2
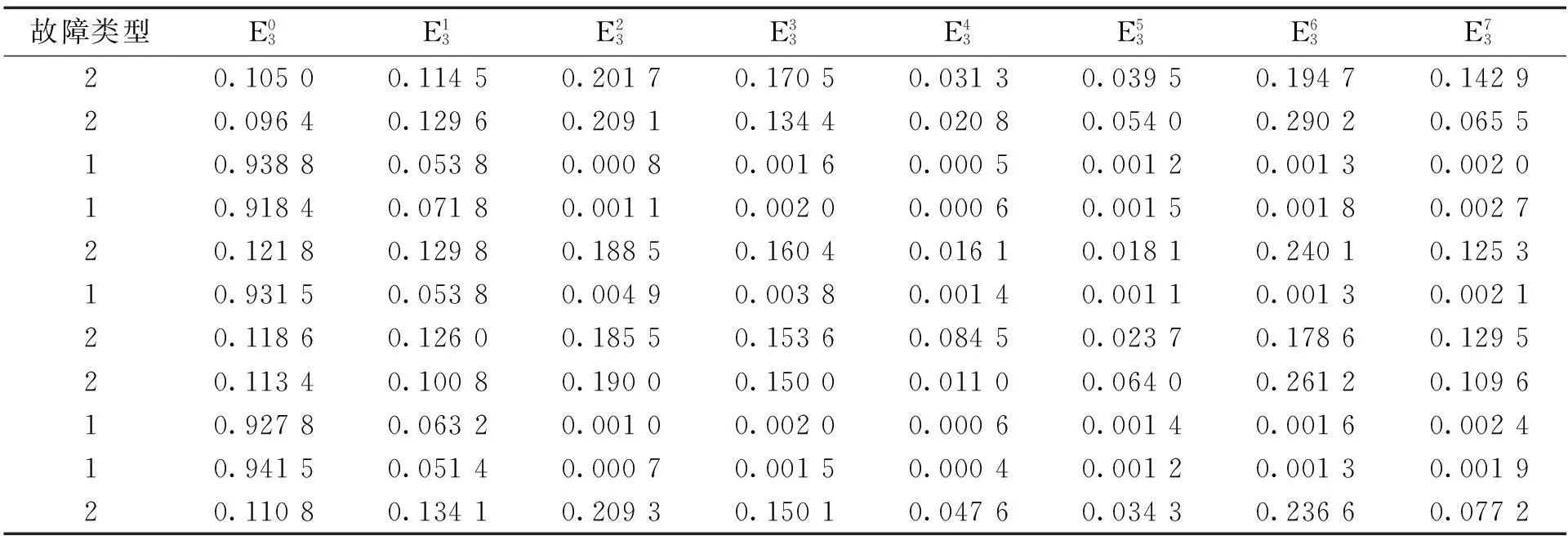
故障类型E03E13E23E33E43E53E63E7320.10500.11450.20170.17050.03130.03950.19470.142920.09640.12960.20910.13440.02080.05400.29020.065510.93880.05380.00080.00160.00050.00120.00130.002010.91840.07180.00110.00200.00060.00150.00180.002720.12180.12980.18850.16040.01610.01810.24010.125310.93150.05380.00490.00380.00140.00110.00130.002120.11860.12600.18550.15360.08450.02370.17860.129520.11340.10080.19000.15000.01100.06400.26120.109610.92780.06320.00100.00200.00060.00140.00160.002410.94150.05140.00070.00150.00040.00120.00130.001920.11080.13410.20930.15010.04760.03430.23660.0772
继而对原始故障特征样本集使用粗糙集属性约简办法进行降维,消除冗余信息,提取主特征值,把原始故障能量特征样本集中的第1列和第5列提取出来,把8维降至2维,降低了构建模型的难度,缩短构建模型的时间。将此数据进行随机排列之后,取其中的16个作为训练集,其余的14个作为测试集。并对训练集用粒子群优化算法对故障诊断模型进行参数寻优,对应的最佳惩罚因子和核函数参数分别为2.69和4.02。
3.3仿真结果与分析
通过MATLAB软件进行仿真,对16个训练集采用支持向量机分类方法进行训练得到故障诊断模型,再使用故障诊断模型对14个测试集进行分类。如图9所示,图9(a)为轮对踏面正常信号,图9(b)为踏面擦伤故障信号,可以看出,踏面正常信号波动很小,几乎都在峰值±0.1 mm之内,而踏面擦伤故障信号波动较大,超过了±1 mm,有些甚至达到了±1.5 mm,接近±2 mm,说明踏面的正常信号与擦伤故障信号区别明显,运用此种处理方法是可行的。图10为对属性约简后的故障特征集进行支持向量机分类的结果。如图10的测试结果显示,模型训练时间较短,为0. 226 633 s,分类准确率高达100%。预测结果与实际结果完全一致,达到了车载轮对踏面擦伤故障检测与诊断的目的。
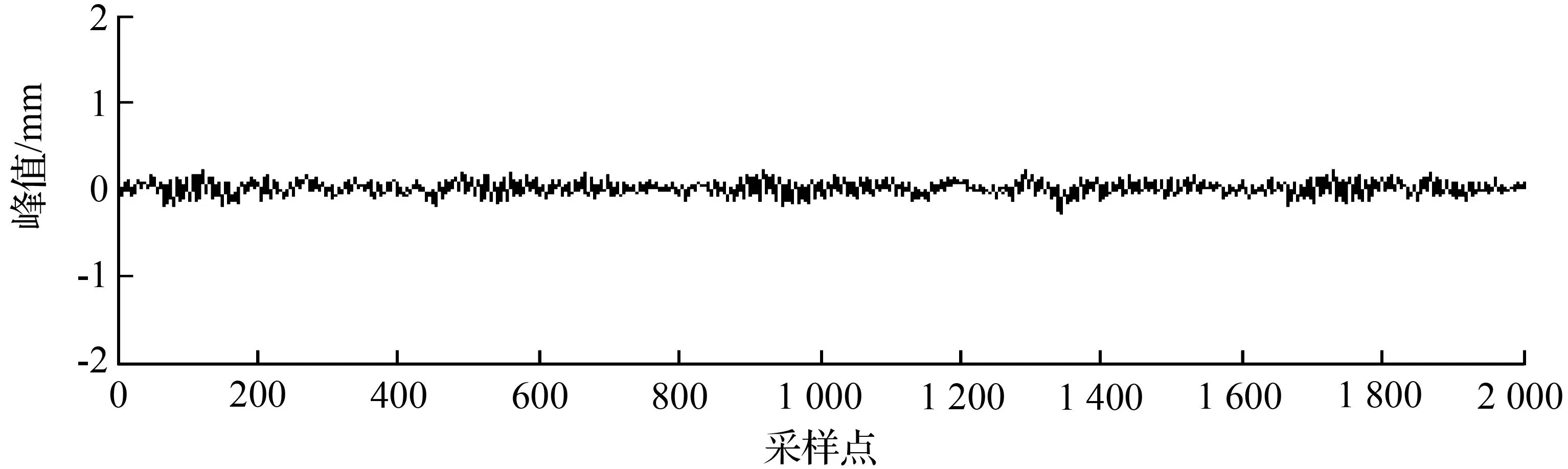
(a) 轮对踏面正常信号
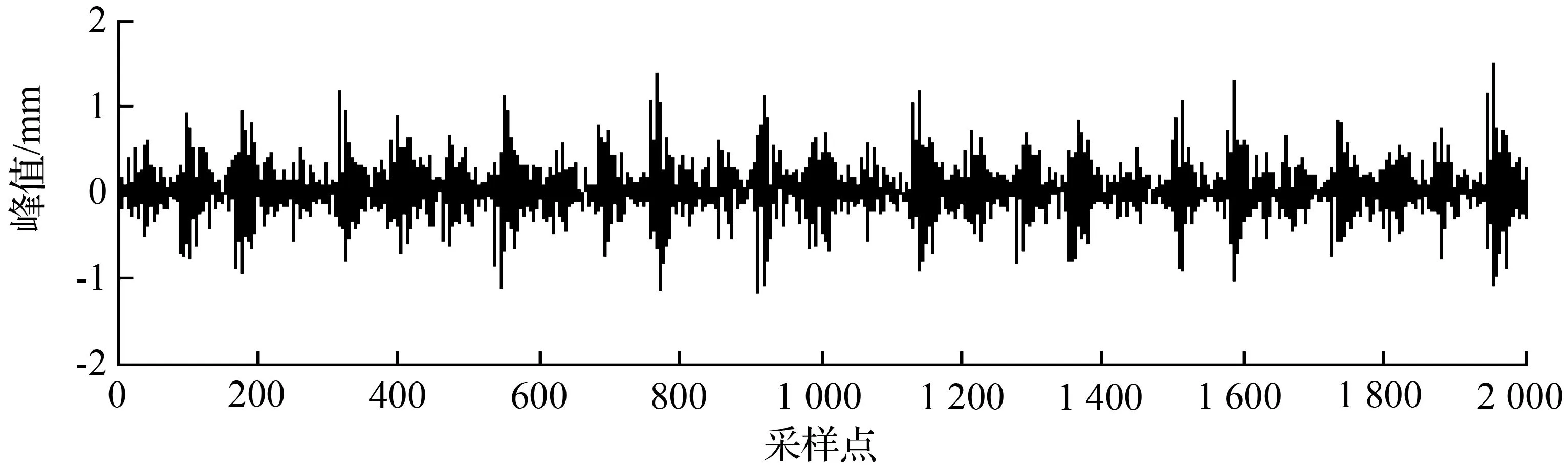
(b) 轮对踏面擦伤故障信号
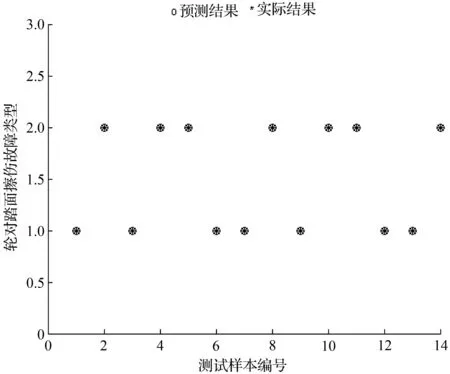
图10 对原始故障特征集进行支持向量机分类的结果
4结论
良好的走行部状态是列车安全运行的保障,轮对踏面作为故障高发部位,实时掌控在途列车的轮对踏面状况,更是确保列车零故障运行的重要前提。本文基于惯性基准法,采用激光扫描传感器与振动加速度传感器相接合的方式对轮对几何参数进行检测,避免了轮对定位不准等引入的系统误差,可以得到更精确实时的数据,为高精度测量轮对几何参数提供理论依据。使用小波包、粗糙集理论和支持向量机分类方法对轮对踏面擦伤故障进行诊断,结果表明该方法能够快速准确地检测出轮对踏面的擦伤故障,是一种轮对踏面擦伤故障诊断的优秀方法。将小波包、粗糙集理论和支持向量机分类方法引进到轮对踏面的擦伤故障诊断中,使用该类方法构建故障诊断模型时间短,为0.226 633 s,诊断准确率高,为100%。相比其他方法,优越性也较明显,故障诊断准确率要高于最小二乘支持向量机方法,而且弥补了 BP 神经网络收敛速度慢等的问题,为机车走行部轮对踏面擦伤故障诊断提供了理论基础,对列车的安全运行具有非常重要的意义。
参考文献:
[1]陈刚,任光胜.车辆轮对状态在线检测系统研究[J]. 城市轨道交通研究,2012,14(10):79-81,124.
[2]邢志伟,孙银生,邓晓丽,等.电动机车牵引齿轮设计概述[J]. 机械传动,2011,35(11):41-44,47.
[3]贺永胜.有关铁路车辆轮对检测技术综述[J]. 科技传播,2013(17) :67-68.
[4]ZHANG Z F,LU C,ZHANG F Z,et al.A Novel method for non-contact measuring diameter parameters of wheelset based on wavelet analysis[J]. Optik-International Journal for Light and Electron Optics,2012,123(5):433-438.
[5]朱跃,俞秀莲,邢宗义.城轨车辆轮对尺寸在线测量系统的研制[J]. 机械制造与自动化,2014,44(2):36-39.
[6]王浩旭,杨永跃.便携式火车轮磨损检测仪[J]. 中国仪器仪表,2009(1):71-73.
[7]曹贺,王泽勇,周伟,等.基于CCD的列车轮对在线检测系统的应用研究[J]. 信息技术,2011,35(10):98-102.
[8]吴学斌,周文祥,金韦利. 铁路车轮五连杆外形仪的自动控制[J]. 工具技术,2009,43(2):97-99.
[9]张颜芳.车轮轮缘及踏面修复工艺与装备[J]. 现代城市轨道交通,2009(5):26-31.
[10]梁建江. 机车车辆轮缘简易检查器的设计和应用[J]. 城市轨道交通研究,2013,16(10):127-128.
[11]JUN J,CHOI M,LEE J,et al.Nondestructive testing of express train wheel using the linearly integrated Hall sensors array on a curved surface[J]. NDT & E International,2011,44(5):449-455.
[12]LE M,JUN J,KIM J,et al.Nondestructive testing of train wheels using differential-type integrated Hall sensor matrixes embedded in train rails[J]. NDT & E International,2013,55(3):28-35.
[13]高岩,邵双运,冯其波.一种激光扫描自动测量轮对几何参数的方法[J]. 中国激光,2013,40(7):182-187.
[15]史倩,吴开华.区域生长的轮对图像分割[J]. 中国图象图形学报,2012,17(9):1122-1127.
[16]FU G,MENCIASSI A,DARIO P.Development of a low-cost active 3D triangulation laser scanner for indoor navigation of miniature mobile robots.[J]. Robotics and Autonomous Systems,2012,60(10):1317-1326.
[17]CAJAL C,SANTOLARIA J,SAMPER D,et al. Simulation of laser triangulation sensors scanning for design and evaluation purposes[J]. International Journal of Simulation Modelling,2015,14(2):250-264.
[18]刘畅,姜涛.列车轮对踏面损伤自动检测系统设计[J]. 长春大学学报,2013,23(10):1215-1220.
[19]黄渊旭,贺德强,程卫.基于正则化RBF的轨道不平顺在线监测系统研究[J]. 广西大学学报(自然科学版),2014,39(5):1007-1013.
[20]BIANCHI D,MAYRHOFER E,GRÖSCHL M,et al.Wavelet packet transform for detection of single events in acoustic emission signals[J]. Mechanical Systems and Signal Processing,2015,64-65:441-451.
[21]颜世玉,王宏,赵海滨,等.脑—机接口中小波和小波包方差的特征比较[J]. 东北大学学报(自然科学版),2012,33(10):1748-1752.
[22]XING Y F,WANG Y S,SHI L,et al.Sound quality recognition using optimal wavelet-packet transform and artificial neural network methods[J]. Mechanical Systems and Signal Processing,2016,66-67:875-892.
[23]陈二恒,贺德强,刘建仁,等.基于小波包和贝叶斯分类的机车走行部滚动轴承故障诊断研究[J]. 铁道科学与工程学报,2015,12(3);636-642.
[24]CHEN D,ZHANG X,LI W.On measurements of covering rough sets based on granules and evidence theory[J]. Information Sciences,2015,317:329-348.
[25]王学恩,韩崇昭,韩德强,等. 粗糙集研究综述[J]. 控制工程,2013,20(1):1-8.
[26]陈昊,杨俊安,庄镇泉.变精度粗糙集的属性核和最小属性约简算法[J]. 计算机学报,2012,35(5):1011-1017.
[27]ZHANG X L,CHEN W,WANG B J,et al .Intelligent fault diagnosis of rotating machinery using support vector machine with ant colony algorithm for synchronous feature selection and parameter optimization[J]. Neurocomputing,2015,167:260-279.
[28]杨锡运,孙宝君,张新房,等.基于相似数据的支持向量机短期风速预测仿真研究[J]. 中国电机工程学报,2012,32(4):35-41.
(责任编辑梁健)
The fault diagnosis of wheel set tread based on vehicle detection
XIANG Wei-bin1, HE De-qiang1, MIAO Jian1, LIU Jian-ren2, CHEN Gui-ping1
(1.College of Mechanical Engineering,Guangxi University, Nanning 530004, China;2.Nanning China South Railway Rail Transit Group Co.LTD, Nanning 530021, China)
Abstract:In order to ensure the running safety of high speed railway, the running state of train wheel set needs to be monitored in real time. A new detection method of wheel set geometry parameter is presented by vehicle-borne. On the basis of above method, the fault diagnosis model of wheel tread flat sliding is proposed with rough sets(RS) and Support Vector Machines(SVM). The geometric parameters of the wheel set are acquired by sensors. The data is aligned with time alignment algorithm and analyzed by wavelet. The fault feature set is constructed and the attributes reduction is made by rough sets, feature set is extracted and the redundancy factors are removed. Finally, fault diagnosis model is constructed for fault classification with SVM, which achieved the fault diagnosis of wheel tread flat sliding. From the virtual result of MATLAB, this method reduces the modeling time at 0.226 633 s, the diagnosis accuracy rate is up to 100%. This method can also be applied to rail transportation, boating and mining, which has a rotating body and need for data acquisition, state monitoring and fault diagnosis.
Key words:wheelset geometrical parameters; rough set (RS); support vector machine (SVM); fault diagnosis
中图分类号:TP391.9;U260
文献标识码:A
文章编号:1001-7445(2016)02-0434-09
doi:10.13624/j.cnki.issn.1001-7445.2016.0434
通讯作者:贺德强(1973—),男,湖南桃江人,广西大学教授,博士生导师,博士; E-mail: hdqianglqy@126.com。
基金项目:国家自然科学基金资助项目(51165001);广西自然科学基金面上项目(2013GXNSFAA019297);广西科技攻关项目(桂科攻1598009-6)
收稿日期:2015-12-10;
修订日期:2016-01-04
引文格式:向伟彬,贺德强,苗剑,等.基于车载检测装置的列车轮对踏面擦伤故障诊断研究[J].广西大学学报(自然科学版),2016,41(2):434-442.
猜你喜欢
一重技术(2021年5期)2022-01-18
科教导刊·电子版(2021年6期)2021-05-06
成都信息工程大学学报(2019年2期)2019-08-28
系统管理学报(2018年3期)2018-08-13
电子制作(2018年10期)2018-08-04
电子技术与软件工程(2016年20期)2016-12-21
价值工程(2016年32期)2016-12-20
价值工程(2016年29期)2016-11-14
厦门理工学院学报(2016年3期)2016-11-10
科学与财富(2016年28期)2016-10-14
