
穿戴式步行辅助机器人控制方法研究进展
2016-05-11 03:22马文涛罗天洪
河北科技大学学报 2016年2期
张 霞,钱 蕾,马文涛,罗天洪
(重庆交通大学机电与车辆工程学院,重庆 400074)
穿戴式步行辅助机器人控制方法研究进展
张霞,钱蕾,马文涛,罗天洪
(重庆交通大学机电与车辆工程学院,重庆400074)
摘要:随着中国人口老龄化进程的飞速演变,老年人群体利用机器人技术进行日常步行活动的需求日益增大。穿戴式步行辅助机器人根据用户体能进行主/从运动辅助(据需辅助)的功能特性与人们的生理需求相匹配,对改善机械系统的柔性、亲和力及友好感具有促进作用。针对步行运动的据需辅助问题,以实现主/从柔性辅助为目标,提出并构建一种髋关节中枢模式发生器(CPG)控制和膝关节分级阻抗控制相结合的新型Hybrid控制方法,研究主/从辅助模式决策及柔性转换机制、膝关节分级阻抗控制切换及其稳定性、以及Hybrid控制理论的据需辅助效应,为穿戴式步行辅助机器人技术的研究与发展提供新的思路。
关键词:机器人控制;穿戴式步行辅助;Hybrid控制;据需辅助;分级阻抗控制;CPG控制
第6次人口普查显示,中国已步入世界上人口老龄化规模最大、发展速度最快的国家行列,60岁及以上人口约占全国总人口的13%。伴随老年人肌力机能、心肺功能的退化,步行所占日常活动的比例逐步减少,从而导致各种疾病罹患率大幅上升,如此恶性循环最终导致运动能力的完全丧失。日常的穿戴式步行辅助有利于改善老年人的运动机能,对预防退行性改变具有重要的康复医学意义。伴随机器人技术的发展和全球人口老龄化进程的快速演化,穿戴式机器人技术逐渐显现出非常广阔的市场应用前景,并已成为国际机器人领域的一个研究热点。穿戴式步行辅助机器人相关技术的研究不仅在帮助老年人重获自理能力、独立参与社会活动、提高生活质量等助老助残问题方面具有重要的社会意义,而且对中国全面建设和谐社会更具有显著的经济和社会效益。
利用机器人进行运动辅助时,机器人的据需辅助(assisted-as-needed, AAN)功能是其面向日常使用的核心要素。据需辅助是指机器人实时评估用户的体能提供与用户需求相匹配的辅助,达到理想的辅助目的。例如,当人们在运动机能低下时,希望机器人能够主动地牵引;当人们在进行自发运动时,希望机器人是从动的,否则,人们参与运动的积极性会受到阻碍。据需辅助的功能特性与人们的潜在生理需求相匹配,对改善机械系统的柔性、亲和力及友好感具有极大的促进作用。因此,穿戴式机器人控制方法及其据需辅助效应的研究有利于实现人机交互与运动辅助的融合,为改善穿戴式机器人的控制性能提供崭新的思路和途径。
1穿戴式步行辅助机器人控制方法研究现状
1.1传统控制方法
传统的穿戴式辅助机器人控制方法大致分为基于模型的阻抗控制和基于表面肌电信号(surface electromyography, sEMG)的控制方法。
辅助机器人的阻抗控制策略是从传统工业机器人的控制技术演化而来,引入自适应算法等优化策略调整机器人的机械阻抗,进而优化关节的位置偏差与人的作用力之间的动态关系,最终生成理想的主/从运动模式,主要采用遗传算法等进行阻抗参数的优化。RIENER等[1]为LOKOMAT机器人主动训练模式设计了阻抗控制器,探讨了通过改变机械阻抗对改变训练模式的影响。BANALA等[2]为BGO采用PD反馈轨迹跟踪控制,提出采用阻抗控制方法的主动运动训练。文忠等[3]提出了基于阻抗模型的步态轨迹自适应算法,通过调整阻抗参数改变步态自适应程度和训练的柔顺性。上述研究成果表明,基于优化策略的变阻抗控制方法在一定程度上实现了柔性主/从运动,但需在动作的柔性和刚度之间做折中选择。
基于EMG的控制方法能有效地测量人体运动时因控制肌肉收缩而释放的电气信号,进一步估算人体关节力矩,从而直接对人体关节力矩进行补偿。在步行康复训练中,人们广泛采用EMG技术对腿部肌肉活性度进行评估,同时,基于EMG信号建模的控制方法能有效地跟踪人体运动意识,补偿关节力矩实现从动性运动辅助。KASAOKA等[4]为HAL提出了基于EMG的控制方法,通过EMG信号评价肌肉活性度,补偿关节力矩,实现从动辅助。KIGUCHI等[5]总结了关节力矩与肌肉活性度的关系行列式,基于EMG信号的反馈,根据关系行列式得到力矩控制信号。然而,EMG控制方法对运动的主导能力还存在争议。
通过对传统控制方法的发展现状分析可知,如何实时地从与人体机能紧密联系的特性参数中提取出“人体机能状态-辅助模式”的评价函数,以便根据人体机能优化机器人的辅助模式,提出新型步行辅助控制方法,更好地解决并实现主/从据需辅助的控制目标,克服传统控制方法的本质缺陷,对改善步行辅助机器人的操作性能、提高机械系统的亲和力及友好感是非常关键的。
1.2Hybrid控制方法
为了克服上述单一控制方法的本质缺陷,穿戴式步行辅助机器人的控制方法正在向Hybrid控制策略的方向发展。Hybrid控制策略是多种、单一、基础性控制方法的综合体系,通过多种控制策略的切换或参数的调整,使各种控制策略能够相互取长补短,实现主/从据需辅助的目标。现有的Hybrid控制策略大多是由传统的阻抗控制、顺应控制及相关稳定性策略构成。HAL-3(2005)采用了EMG控制与阻抗控制相结合的混合控制方法,以期通过切换控制模式,实现主/从步行辅助的控制目标[6]。HAL-3控制系统将使用者的运动模式细分为游脚期运动、支撑期运动、起立运动和爬楼梯运动,预先建立了各种运动模式相对应的子控制器。控制器通过提取使用者执行运动时相关肌肉的EMG信号,进一步推算出肌肉活性度(分为主动、被动和自由状态),结合地面反作用力信号判断使用者的运动模式,以便进行相应子控制器的切换。HAL-3的混合控制系统示意图如图1所示。

图1 HAL-3的混合控制系统框图Fig.1 A block diagram of the hybrid control system for HAL-3
KAZEROONI等[7]为下肢外骨骼辅助机器人BLEEX建立了基于运动学和动力学建模的Hybrid控制策略包括主-从(master-slave)控制方法和灵敏度增幅(sensitivity amplification)控制方法两部分。在支撑期采用主-从控制,而在游脚期采用灵敏度增幅控制,文献[7]指出,为确保控制系统良好的动态特性,文献所提出的Hybrid控制方法要求进行精确的动力学建模。RAJASEKARAN等[8]为外骨骼机器人H1提出了基于踝、股关节分级控制的顺应控制策略,结合基于COMp的姿势稳定及重构策略,以期实现稳定行走及据需辅助的控制目标。OH等[9]提出了基于干扰前馈补偿控制、目标轨迹反馈控制、轨迹前馈控制及力矩控制的Hybrid控制系统,分别对各类控制规律进行了线性化处理,尽可能地实现各类控制算法之间的连续、平滑切换。
综上所述,传统、单一的控制策略很难实现据需辅助的控制目标,Hybrid控制方法已成为穿戴式机器人控制方法发展方向的主流。然而,已有的Hybrid控制器主要由传统的阻抗控制、顺应控制、干扰补偿控制等构成,这些子控制器均需要进行机器人机构运动学和动力学建模,导致整个控制器结构复杂程度的成倍增加,且人机固连环境下人体运动机能评估、子控制算法的切换和控制系统稳定性等关键问题亦未取得突破。
2CPG控制方法
2.1CPG控制机理
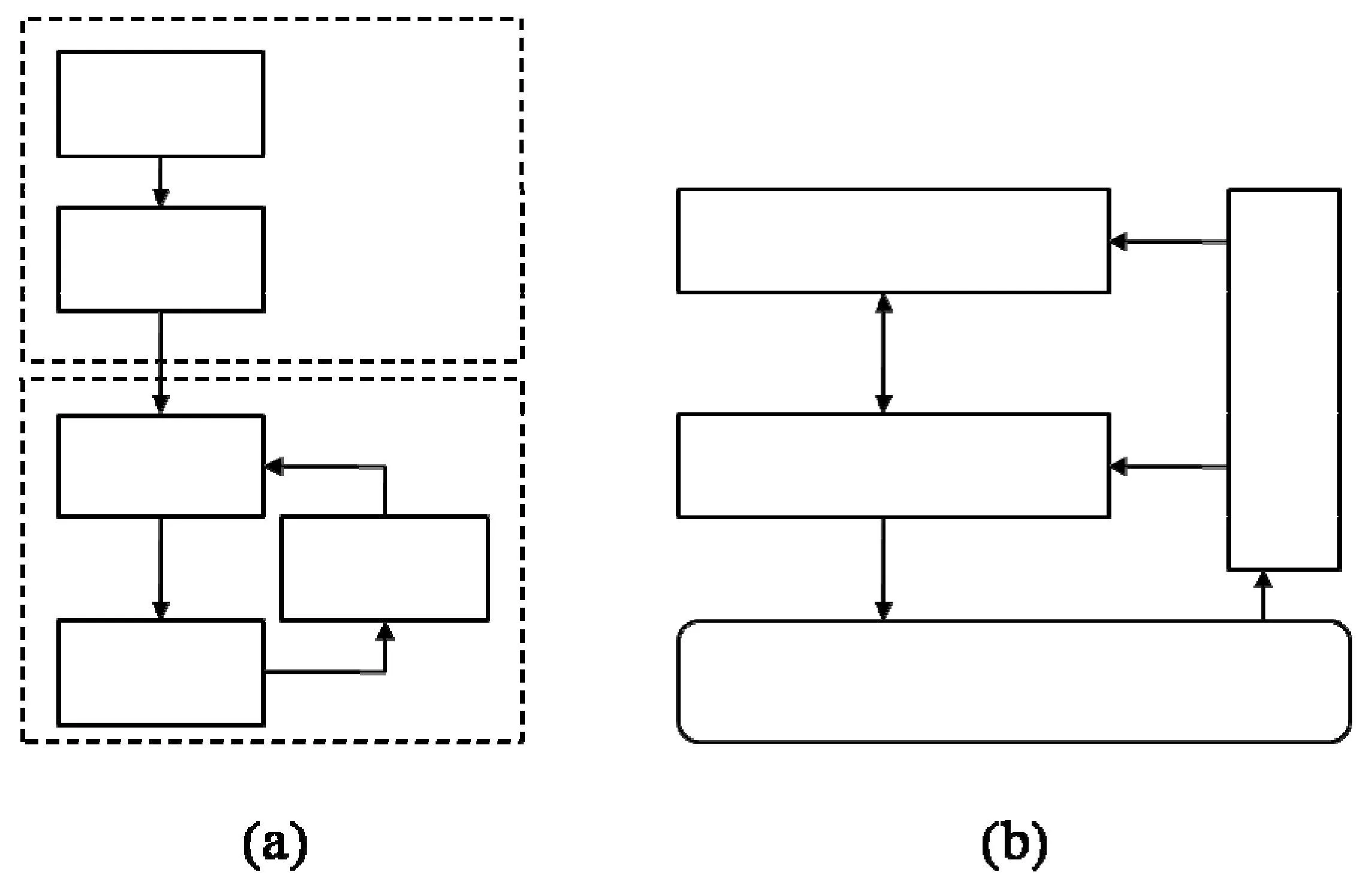
图2 传统控制与CPG控制Fig.2 Conventional control and CPG control
伴随动物运动控制机理与运动神经生理学的研究与发展,人们对基于中枢模式发生器(central pattern generator, CPG)神经电路模型的生物控制方法在机器人节律运动控制、人机交互等领域进行了广泛的探索性与应用性研究,使其在提高机器人亲和力、柔性、环境适应性等方面的优越性得到认可。生物学家普遍认为,动物的节律运动是低级神经中枢的自激行为,由位于脊髓中的CPG控制。机器人的生物控制方法通过对CPG控制机理的模拟,建立相应的数学模型,利用计算机实现对机器人的运动控制。CPG模型作为控制机制有以下主要特点:1)可以在缺乏高层命令和外部反馈的情况下自动产生稳定的节律信号,而反馈信号或高层命令又可以对CPG的输出行为进行调节;2)结构简单,有很强的适应性,易于和输入信号或物理系统耦合,使节律行为在整个系统中传递。KIMURA等[10]指出,传统控制系统通常将控制过程分为规划-控制这2个独立阶段,通过控制实际位置与规划轨迹的偏差实现运动,传统控制机理如图2 a)所示。而动物的节律运动没有明显的运动规划过程,基本的节律信号通过CPG产生,运动的适应性通过基于反射机制的感知-运动融合功能实现,通过神经系统、机械本体、环境三者之间的交互,实现节律行为的全局传递,是一种将运动的规划和控制过程合二为一的控制方式,CPG控制机理如图2 b)所示。与传统的控制方法相比较,CPG控制方法规避了运动学建模及其逆解算,具有非精确、快速运动、自组织、自适应的行为特点,这与人类实施节律运动的行为特点相吻合,是一种更加简洁、自然、直接、快速的运动控制方法和理论。
在仿生机器人运动控制领域,于海涛等[11]利用改进的Van der pol方程构造非线性振子作为单个CPG的数学模型,在此基础上设计具有线性反馈项的环状CPG网络模型,并给出了机器人步态协调运动的控制方法。IJSPEERT[12]利用漏极积分器建立了段、体、肢3个层次的CPG网络,采用遗传算法调节网络参数,模拟蝾螈的水陆两种运动方式。吴炯等[13]采用CPG模型的输出建立上肢运动的六肌模型,得到所需要的驱动转矩,对KEN等的曲柄转动机构中人体手臂运动实验进行了仿真验证。KASUGA等[14]采用Matsuoka模型控制握手机器人,通过调节与外部信号的耦合强度改变主/从人机协同握手运动。卢振利等[15]针对多关节蛇形机器人建立了基于循环抑制的CPG模型,实现了蛇形机器人的三维运动控制。汪明等[16]构建了仿生机器鱼的CPG网络模型,实现了机器鱼直游、倒游、胸鳍-尾鳍协调运动等多种模式。魏武等[17]针对蛇形机器人链式CPG模型,采用PSO算法优化CPG控制模型参数。WANG等[18]提出了双足机器人跳跃运动控制的中间神经元-运动神经元CPG双层网络。在步行康复方面基于CPG控制的FES电刺激系统也有较广泛研究。王颖等[19]对康复训练提出了基于CPG网络的FES电刺激系统,正常受试者实验验证了该系统对产生非自主运动的有效性。此外,CPG控制在步行辅助领域中也有初步研究。MIYAKE[20]研制的步行伴侣Walk-mate用耦合振荡器产生与偏瘫患者健康侧腿步调一致的同步信号,用声音提醒偏瘫患者两腿按目标步调行走。临床研究结果验证了CPG对偏瘫患者的辅助治疗效果。文献[21]采用耦合振荡器控制机器人髋关节,实现机器人与人体步行运动的相位同步。
上述文献表明,CPG控制规避了运动学和动力学建模,能够根据环境的要求,通过优化CPG参数改变运动的相位、周期及幅值,实现自然稳定的运动控制,在节律运动控制包括多足步行运动控制、仿生机器人运动控制、人机协同运动控制领域具有极大的应用前景。以CPG中枢模式发生层为核心、加以高层辅助模式决策机制的CPG控制理论对穿戴式步行辅助机器人控制方法研究提供了很有潜力的研究思路。
2.2人体步行运动规律及其周期振荡特征
自然人体步行运动可看作是多关节复合节律运动的综合产物,步行过程中的髋关节运动和膝关节运动既具有截然不同的运动特征,亦具有极大的关联性。伴随步态过程中支撑期和游脚期的交替变更,髋关节始终交替地进行矢状面内的伸展/弯曲运动,具有典型的振荡特性和节律运动特性。上述特征使得CPG技术能够方便地将髋关节运动从一种振荡状态转入另一种振荡状态,实现主/从步行运动辅助,并保证振荡运动转换的稳定性、快速性。
相比于髋关节,膝关节在步态过程中的运动特征比较复杂,具体体现在:膝关节在支撑期时的主要作用是维持姿势稳定,而在游脚期时的主要作用是为小腿及以下部分的屈伸运动提供关节力矩,步行过程中的膝关节运动交叉融合了周期运动和非周期运动。同时,步行运动中髋膝关节关联运动具有如下特征:首先,处于游脚期时,髋关节开始做弯曲运动,膝关节伴随髋关节的弯曲自然地向前摆动;其次,处于单脚支撑期时,髋关节开始做伸展运动,膝关节伴随髋关节的伸展保持大腿和小腿的直立状态。为了能够更好地模拟自然步行运动,有必要针对机器人髋关节和膝关节设计相应的控制器和同侧髋膝关节联动机制。
3新型Hybrid控制方法研究展望
结合自然人体步行运动规律的特性分析,综合考量以上各种控制方法的优缺点,构建一个基于CPG控制和阻抗控制相结合的新型Hybrid控制策略。采用CPG输出作为髋关节的目标关节角,再利用PD反馈控制实现对目标轨迹的跟踪控制,从位置环直接控制能够更为直观地获得机器人髋关节运动的频率、幅值、维持左右髋关节的逆相位。同时,借助髋关节CPG的周期特性,将CPG的神经元状态作为变量分配给膝关节运动控制系统,建立同侧髋关节与膝关节的链接,实现髋膝关节联动。一方面使得髋关节做弯曲运动时膝关节能够自由地向前摆动,髋关节做伸展运动时膝关节能够保持一定的姿势维持步行稳定性。另一方面,采用CPG控制和阻抗控制相结合的方法亦规避了多关节CPG网络结构构造复杂、控制参数繁多、不利于获得良好控制性能的问题。新型Hybrid控制策略的研究内容主要包含以下两部分。
1)髋关节CPG控制
首先,开展CPG特性研究获得机器人髋关节运动的频率、幅值、维持左右髋关节的逆相位;其次,开展人体运动意图识别研究,使机器人具有对人体运动协调适应的能力;最后,开展主/从辅助模式决策及转换方法研究,根据人体运动机能的要求进行主/从辅助模式决策与转换,实现主/从据需辅助的控制目标。
2)膝关节分级阻抗控制
根据支撑期和游脚期分别执行膝关节的高、低阻抗控制规律,并结合髋关节运动特征形成自然的髋膝关节联动,最终实现自然的步行运动。该部分的重点研究内容分为步态过程检测方法研究;膝关节分级阻抗控制研究;髋膝关节联动策略研究;膝关节分级阻抗控制切换方法及其稳定性研究。
3.1亟待解决的科学问题
为了突破当前步行辅助控制技术的局限性,以下科学问题需要亟待解决。
1)人机协调控制技术。无论采用何种控制方法,穿戴式辅助机器人都需要考虑人机协调这一要素。因此,围绕人机协调这一控制目标,研究人体运动意识感知及自适应方法、机器人多关节协调控制技术,是该领域需要解决的基础问题。
2)主/从辅助模式决策及转换方法。主/从辅助模式决策及转换方法是实现主/从据需辅助、提高机器人亲和力及友好感的关键要素。为了解决这个问题,需要提取与人体运动机能密切联系的特征信号,通过辅助模式决策机制的研究辨识人体运动机能,建立“人体机能状态-机器人辅助模式”的评价函数优化辅助模式,进一步通过辅助模式转换方法研究,以期实现机器人辅助模式主/从柔性转换。
3)膝关节分级阻抗控制方法及其稳定性。双足步行运动处于支撑期时,膝关节的主要作用是维持姿势稳定;处于游脚期时,膝关节的主要作用是为小腿及以下部分的屈伸运动提供关节力矩。研究符合自然运动规律的膝关节分级阻抗控制方法,为支撑期和游脚期建立相应的高、低阻抗分级控制规律,进一步开展分级阻抗控制切换方法研究,确保控制信号的平滑和连续。
3.2技术路线
髋关节CPG控制技术的研究工作涵盖了人行走意图感知与自适应、主/从辅助模式决策与转换的关键核心内容,是实现人机协调控制的基础和关键要素,需要首先研究并确立CPG控制对步行辅助的科学意义。在确立CPG控制可行性的基础上,研究工作的重点转向膝关节分级阻抗控制。膝关节分级阻抗控制技术的研究工作涵盖了分级阻抗控制研究、髋、膝关节联动策略研究和分级阻抗控制切换方法及其稳定性研究的关键核心内容,是实现髋关节和膝关节协调控制的重要基础。
因此,依据CPG建模、人体运动意识自适应机制、髋关节主/从辅助模式决策及柔性转换机制、膝关节分级阻抗控制及其稳定性研究的大致思路,采取如图3所示技术路线,逐步探索Hybrid控制系统的搭建;在此基础上,开展Hybrid控制的据需辅助效应研究;最终确立步行辅助机器人基于CPG模型及分级阻抗控制的Hybrid控制方法,实现据需辅助的控制目标。

图3 总体研究技术路线Fig.3 Overall research technology route
4结语
现有的步行辅助控制技术是从传统工业机器人控制技术演化而来,距离据需辅助的控制目标还存在较大差距,Hybrid控制策略已成为穿戴式步行辅助机器人控制方法发展方向的主流。今后的研究重点在于,针对步行运动的据需辅助问题,以实现主/从柔性辅助为目标,提出并构建一种髋关节CPG控制和膝关节分级阻抗控制相结合的新型Hybrid控制方法,采用理论研究与实验验证相结合的研究方法,系统、深入地研究“人机协调控制技术”、“主/从辅助模式决策及柔性转换机制”、“膝关节分级阻抗控制切换及其稳定性”的关键科学问题,进一步开展Hybrid控制理论的据需辅助效应研究,初步探索出一套基于CPG模型及阻抗控制的Hybrid控制策略,为穿戴式步行辅助机器人技术的研究与发展提供新的思路。
参考文献/References:
[1]RIENER R, LÜNENBURGER L, JEZERNIK S, et al. Patient-cooperative strategies for robot-aided treadmil training: First experimental results[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2005, 13(3): 380-394.
[2]BANALA S K, KULPE A, AGRAWAL S K. A powered leg orthosis for gait rehabilitation of motor-impaired patients [C]// IEEE International Conference on Robotics and Automation. NJ:[s.n.], 2007: 4140-4145.
[3]文忠, 钱晋武, 沈林勇, 等. 基于阻抗控制的步行康复训练机器人的轨迹自适应[J].机器人, 2011, 33(1):142-149.
WEN Zhong, QIAN Jinwu, SHEN Linyong,et al. Trajectory adaptation for impedance control based walking rehabilitation training robot[J]. Robot, 2011, 33(1):142-149.
[4]KASAOKA K, SANKAI Y. Predictive control estimation operator’s intention for stepping-up motion by exo-skeleton type power assist system HAL [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems.[S.l.]:[s.n.], 2001: 1578-1583.
[5]KIGUCHI K, QUAN Q. Muscle-model-oriented EMG-based control of an upper-limb power-assist exoskeleton with a neuro-fuzzy modifier [C]//IEEE International Conference on Fuzzy Systems. Hong Kong:[s.n.], 2008: 1179-1184.
[6]LEE S, SANKAI Y. Minimizing the physical stress by virtual impedance of exoskeletal robot in swinging motion with power assist system for lower limb [J]. Journal of the Japan Society of Mechanical Engineers, 2005, 71:274-282.
[7]KAZEROONI H, RACINE J L, HUANG L H,et al. On the control of the berkeley lower extremity exoskeleton (BLEEX) [C]// Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona:[s.n.], 2005:4354-4360.
[8]RAJASEKARAN V, ARANDA J, CASALS A,et al. An adaptive control strategy for postural stability using a wearable robot [J]. Robotics and Autonomous Systems, 2015, 73(C):16-23.
[9]OH S, BAEK E, SONG S K,et al. A generalized control framework of assistive controllers and its application to lower limb exoskeletons [J]. Robotics and Autonomous Systems, 2015, 73:68-77.
[10]KIMURA H, FUKUOKA Y, NAKAMURA H. Biologically inspired adaptive dynamic walking of the quadruped on irregular terrain[C]//In Proceedings of 9th International Symposium of Robotics Research. [S.l.]:[s.n.],2000:271-278.
[11]于海涛, 查富生, 郭伟, 等. 非线性振子的CPG步态控制方法研究[J]. 机械与电子, 2009(10): 48-51.
YU Haitao, ZHA Fusheng, GUO Wei, et al. Research on gait control of CPG based on nonlinear oscillator [J]. Machinary & Electronics, 2009(10):48-51.
[12]IJSPEERT A J. Central pattern generators for locomotion control in animals and robots: A review[J]. Neural Networks, 2008, 21(4):642-653.
[13]吴炯, 王如彬, 张志康. 基于CPG的上肢周期性运动控制的研究[J]. 动力学与控制学报, 2010, 8(2): 151-154.
WU Jiong, WANG Rubin, ZHANG Zhikang. Periodic motion control of human arm movement based on CPG model[J]. Journal of Dynamics and Control, 2010, 8(2):151-154.
[14]KASUGA T, HASHIMOTO M. Human-robot handshaking using neural oscillators [C]// Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona:[s.n.], 2005: 3802-3807.
[15] 卢振利, 马书根, 李斌, 等. 基于循环抑制CPG模型控制的蛇形机器人三维运动[J]. 自动化学报, 2007, 33(1): 54-58.
LU Zhenli, MA Shugen, LI Bin, et al. 3-dimensional locomotion of a snake-like robot controlled by cyclic inhibitory CPG model [J]. Acta Automatics Sinica, 2007, 33(1):54-58.
[16] 汪明, 喻俊志, 谭民. 胸鳍推进型机器鱼的CPG控制及实现[J]. 机器人, 2010, 32(2): 248-255.
WANG Ming, YU Junzhi, TAN Min. Central pattern generator based control and implementation for a pectoral-fin propelled robotic fish[J]. Robot, 2010, 32(2):248-255.
[17] 魏武, 朱红山. 基于PSO蛇形机器人CPG控制模型参数的优化[J]. 计算机工程与设计, 2011, 32(8): 2813-2816.
WEI Wu, ZHU Hongshan.CPG control model of snake-like robot parameters of optimization based on PSO[J]. Computer Engineering and Design, 2011, 32(8):2813-2816.
[18]WANG Tingting, GUO Wei,LI Mantian,et al. CPG control for biped hopping robot in unpredictable environment[J]. Journal of Bionic Engineering, 2012, 9(1): 29-38.
[19]王颖, 张定国. 基于中枢模式发生器控制的电刺激步行康复系统设计与实验[J]. 中国生物医学工程学报, 2012, 31(4): 558-564.
WANG Ying, ZHANG Dingguo. A walking rehabilitation system using electrical stimulation based on central pattern generator control: Design and experiment[J]. Chinese Journal of Biomedical Engineering, 2012, 31(4):558-564.
[20]MIYAKE Y. Interpersonal synchronization of body motion and the walk-mate walking support robot [J]. IEEE Transactions on Robotics, 2009, 25(3):638-644.
[21]Honda Motor Company Limited. 歩行アシスト」をバリアフリ[EB/OL]. http://www.honda.co.jp/news/2008/c080422.html,2008-04-22.
Research advances in control methods of wearable walking assist robots
ZHANG Xia, QIAN Lei, MA Wentao, LUO Tianhong
(Department of Mechatronics and Automobile Engineering, Chongqing Jiaotong University, Chongqing 400074, China)
Abstract:As the proportion of the elderly in China increases, the need for robotic assist walking is growing. The assisted-as-needed (AAN) property of a wearable walking assist robot matches a user’s biological need and improves the flexibility, appetency and friendliness of a mechanical system. To realize AAN walking and aiming at realizing master/slave flexible assist, a new hybrid control method consisting of hip joint control based on central pattern generators and knee joint impedance structured control is proposed. The adaptation of a robot's master/slave motion mode to a user's physical function, the continuous switching method for knee joint impedance structured control and its stability, and the AAN effect of the Hybrid control theory are studied, which provides a new thought for the development of wearable walking assist robots.
Keywords:robot control;wearable walking assist; Hybrid control; assisted-as-needed; impedance structured control; CPG control
中图分类号:TP242
文献标志码:A
作者简介:张霞(1982—),女,重庆人,副教授,博士,主要从事机器人控制方法与理论、外骨骼运动辅助机器人方面的研究。
基金项目:国家自然科学基金(51505048);重庆市教委科学技术研究项目(KJ1500526)
收稿日期:2015-12-10;修回日期:2016-02-29;责任编辑:陈书欣
doi:10.7535/hbkd.2016yx02002
文章编号:1008-1542(2016)02-0118-06
E-mail:zx512@126.com
张霞,钱蕾,马文涛,等.穿戴式步行辅助机器人控制方法研究进展[J].河北科技大学学报,2016,37(2):118-123.
ZHANG Xia, QIAN Lei, MA Wentao,et al.Research advances in control methods of wearable walking assist robots[J].Journal of Hebei University of Science and Technology,2016,37(2):118-123.
