
掠海飞行目标的雷遥协同跟踪策略研究
2016-05-10 03:27:28卢长海
电子科技 2016年4期
卢长海
(中国人民解放军第91550部队 92分队,辽宁 大连 116023)
掠海飞行目标的雷遥协同跟踪策略研究
卢长海
(中国人民解放军第91550部队 92分队,辽宁 大连116023)
摘要对掠海飞行目标的低仰角跟踪测量一直是测量雷达需要解决的技术难题之一。文中通过雷达、遥测的一体化设计,采用共同的天线面和伺服系统,实现了雷遥的协同跟踪。根据雷达、遥测技术特点,制定了协同跟踪策略,通过该协同跟踪策略的实施,算法分析结果,验证了策略的有效性,为海杂波条件下雷达的低空探测积累一定经验。
关键词雷遥协同;跟踪策略;引导概率
掠海飞行目标检测与跟踪是雷达探测领域的难题,多径效应将导致回波信号剧烈起伏,有时甚至出现对消,对目标检测带来极大的影响,同时海杂波对低空探测雷达的工作性能也具有较为重要影响。首先掠海飞行目标相对于背景海面非常渺小,进而使得目标后向散射能量相对于海面回波非常微弱,有时会比海杂波还要微弱;其次掠海飞行目标的多普勒频移通常会淹没在因为海面运动引起的多普勒频移中,产生多普勒频率混叠[1]。
协同跟踪是指根据实际环境的约束条件建立衡量不同传感器对目标跟踪能力的标准[2],综合利用不同跟踪手段使跟踪性能最优为目标,通过传感器间的接力、协作跟踪完成监视区域内目标的跟踪任务。对于具有遥测信息发射的合作目标,遥测载波的获取无疑是一种有效的跟踪源。雷达主要任务是精密跟踪测量,因而波束宽度和脉冲宽度都很窄,这样其大范围搜索截获能力就受到一定限制。当雷达的检测分辨单元搜索到目标并且目标回波能量超过所设定的检测门限时,则称为发现目标或截获目标。一般遥测接收系统具有较宽的波束和较高的捕获灵敏度,所以通过雷遥协同来完成掠海飞行目标的捕获跟踪是一种有效的方法。
1传统测量雷达跟踪策略
由于测量雷达首先要完成对目标的连续跟踪,为保证跟踪雷达能及时捕获目标尽早跟踪锁定,需要采取不同的搜索截获方式[3]。在雷达中,用概率统计来描述就是落入概率Pv和发现概率Pd,则截获概率为Pa=Pv·Pd。搜索雷达方程表明,在一定作用距离条件下,加大搜索空域,则会降低发现概率。
跟踪测量雷达采用单脉冲测量体制,系统距离、角度、速度跟踪互相影响并相互制约:当距离未跟踪,角误差无法有效提取,角度回路无法建立;角度跟踪不稳定或丢失时,则可能导致目标滑出天线波束,导致距离回路丢失;同时速度跟踪回路的建立需要以距离跟踪为前提。因此传统单脉冲测量雷达目标跟踪过程需要分以下几个阶段。
1.1距离粗跟踪
截获成功后,首先进行距离回路粗跟踪,此时距离回路采用跟踪宽波门(,为脉冲宽度)进行宽带滤波,滤波的目的是估计当前和未来时刻的运动状态,滤波的主要方法有:线性回归滤波,两点外推滤波,加权最小二乘滤波,α-β滤波,卡尔曼滤波等[4-5]。工程上常采用α-β滤波和卡尔曼滤波,其中α-β滤波是一种容易实现的常增益滤波方法,具有结构简单、存储量少、计算简单、收敛速度快、容易实现等特点,因此信号处理系统采用α-β滤波,滤波系数与目标相对波门最大径向速度有关,粗跟踪采用M/N准则,所谓M/N准则,即对于待检测的N个(N≥M)脉冲视频信号,单个脉冲超过门限电平时为1,否则为0,当N个检测脉冲中“1”的个数等于或大于M时,即可判定为该距离单元内粗跟踪成功,可转入精跟踪,否则回到搜索。
1.2距离精跟踪
1.3角度跟踪
在完成距离精跟踪且收到方位、俯仰跟踪命令后方可进行角度跟踪,角度跟踪利用信号处理形成的角误差信息进行,角度跟踪过程采用M/N+1/2准则,即以N次照射为一组,至少M次有回波存在,认为该组照射有目标,2组中至少有1组有目标即认为角度跟踪成功,若成功则保持,否则进行记忆跟踪,记忆跟踪时间有1s、2s和5s可选。
2雷遥协同跟踪策略
传统雷达遥测协同探测需要2套装备,雷达、遥测装备均有独立的天馈、接收、伺服和数据处理系统,遥测装备捕获目标后把目标遥测信号包络解调后形成误差电压,通过伺服系统位置传感器输出目标角度信息,该位置信息实时传送给测量雷达进行同步引导;目前高精度测量雷达对雷遥协同进行了一体化设计,雷达和遥测引导设备天线共面,具有相同的伺服系统,遥测作为雷达的一个引导源,直接将其跟踪接收机误差电压送共同的伺服驱动系统,雷、遥之间跟踪可以相互切换,如图1所示。
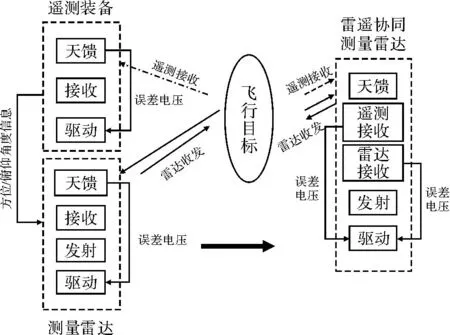
图1 雷达、遥测协同探测框图
此时遥测引导分系统设置为协同状态,测量雷达发射高功率脉冲信号,雷达馈源接收处理目标回波信号,而遥测不发射信号,从遥测馈源接收处理下行遥测信号。目标进入雷达波束后遥测引导系统首先锁定跟踪目标,利用接收遥测接收机送来的角度误差信号完成雷达的捕获跟踪,过程如图2所示。
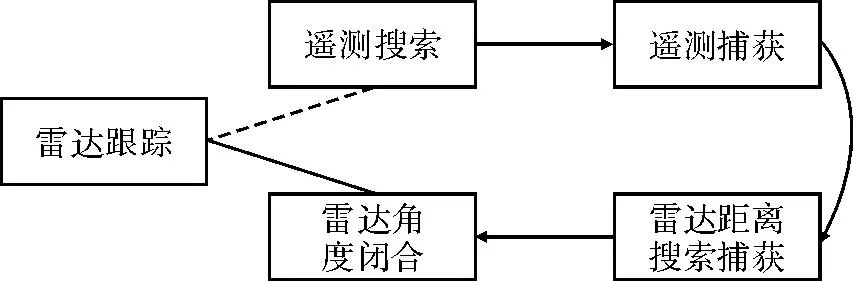
图2 雷遥协同跟踪过程
目标跟踪控制策略的主要包括根据雷达指定的工作方式和有关检测数据,判断目标的跟踪与丢失,控制α、β参数的选择;工作方式控制的主要功能是根据拟定的控制策略逻辑和有关数据,完成距离引导、距离截获方式、跟踪目标切换等控制;遥测引导系统配置遥测跟踪计算机,与测量雷达系统通过网络进行数据交互。在雷达遥测协同工作时,系统的控制终端仍为雷达主控计算机,遥测系统仅通过网络提供跟踪状态、角误差等信息供雷达系统使用,控制流程如图3所示。主控计算机设定7个状态码,如表1所示,各个状态码之间采用下列控制策略进行相互切换。
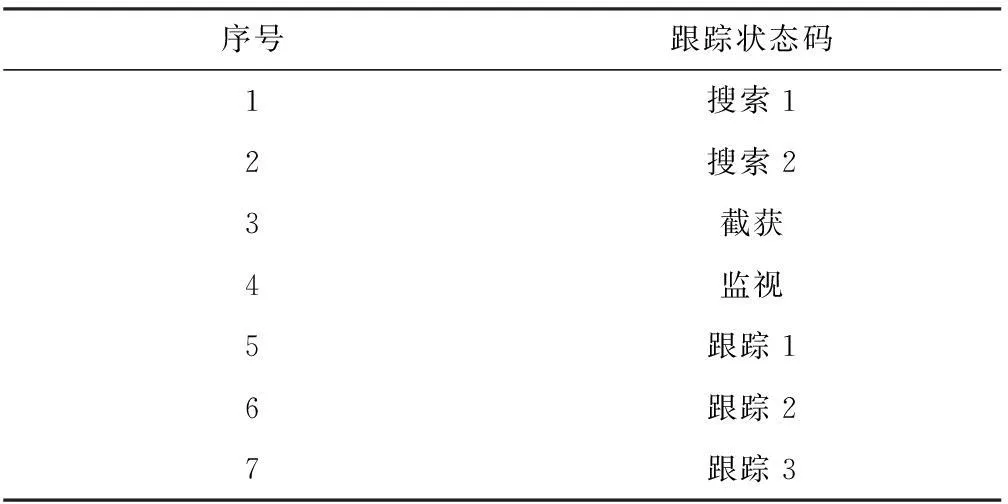
表1 主控计算机状态码定义
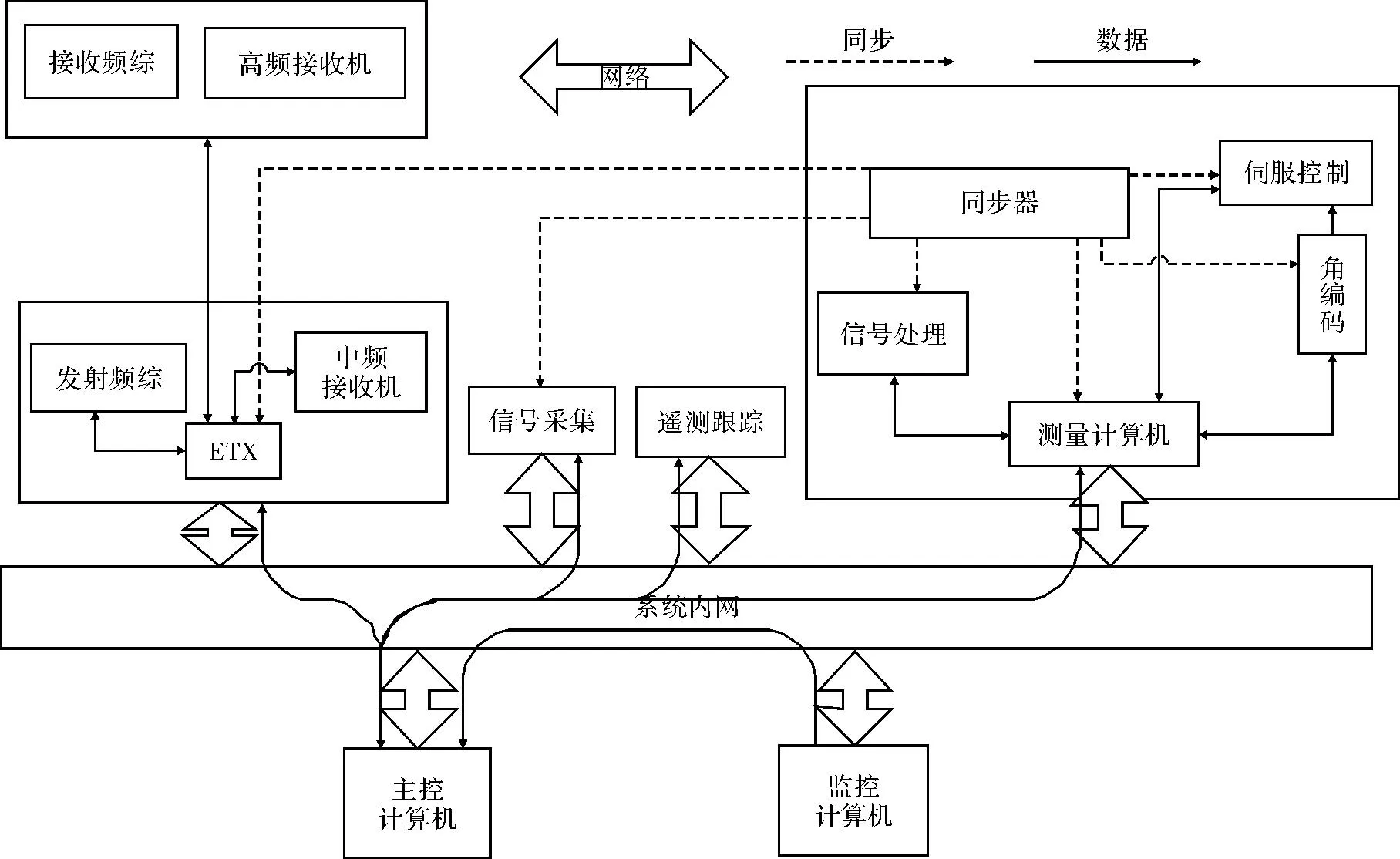
图3 协同工作控制信息流程
搜索1控制伺服按控制字规定的方式进行搜索或引导,即遥测搜索捕获阶段,遥测系统截获下行遥测信号给出遥测有效标志后,伺服即采用遥测角误差进行闭合并对雷达系统进行自引导,由信号处理软件根据检测结果给出有无回波标志,当存在回波且给出距离自动捕获或截获命令时,转搜索2;
搜索2采用一定准则进行距离相关判别,成功转入截获,即距离搜索阶段,在遥测自引导状态下,系统将以较高的概率使雷达波束覆盖目标,此时实现雷达距离搜索并捕获目标,否则回搜索1;
截获进行M/N准则进行判别,成功转监视,此时状态为宽波门距离捕获跟踪,否则回搜索1;
齐苗后15-20天植株开始现蕾,对于一次性追肥的田块,将每亩底施的15 kg尿素和10 kg硫酸钾(或专用肥30 kg)。对于二次追肥的田块,可将每亩底施的10 kg尿素和5 kg硫酸钾(或专用肥20 kg)后移至现蕾期打孔追施、深中耕培土、轻灌;进入开花结薯期,对于二次追肥的田块,可将底施的10 kg尿素和5 kg硫酸钾(或专用肥20 kg)后移至结薯期打孔追施、浅中耕培土、重灌,隔7-10天后复灌水一次。但灌水视天气和土壤墒情而定,以保持土壤湿润状态为宜。费乌瑞它薯块向光性很强,培土质量要高,以防薯块露头[2]。
监视采用粗跟踪波门,开始距离回路闭合,进行M/N准则判别,成功转跟踪1,否则回搜索1;
跟踪1距离采用精跟踪波门闭合,开始AGC回路闭合,进行M/N+1/2准则判别,判别失败回搜索1,成功且给出角度自动捕获或角度跟踪命令则转跟踪2;
跟踪2开始角度回路闭合,进行M/N+1/2准则判别,成功则保持跟踪2,此时完成距离精跟踪和雷达角度闭合跟踪,雷达的跟踪测量状态,否则转跟踪3;
跟踪3记忆跟踪,根据记忆跟踪时间对距离、角度、速度进行外推计算,AGC保持丢失时刻不变,若跟踪3成功,转回跟踪1,失败则转搜索1,再次使用遥测角误差对雷达系统进行自引导,并重新进行雷达的搜索与截获。
3算法分析
协同跟踪的方法一般是基于某些合成目标函数的优化处理,这些目标函数是传感器对所有目标跟踪性能的一种度量,必需将跟踪精度与检测概率一起构成目标函数。雷达的搜索假如在遥测系统跟踪状态下进行,可将遥测系统对雷达的数据定义为引导数据,其误差定义为正态分布。在给定引导数据误差标准偏差的情况下,通常用落入概率Pv作为目标相对雷达位置不确定性的测度,即引导概率。
通过单脉冲天线的跟踪线性范围内的分布积分,即可得到某一维内的引导成功概率。由于方位维和俯仰维的引导属于独立样本,总引导成功概率为两维引导成功概率的乘积。
遥测引导系统跟踪后,天线的指向在单脉冲线性范围内满足正态分布,则符合分布公式为[7]
(1)
式中,σ为随机误差;u为系统误差。
遥测系统在低仰角(E≤3°)精度为:方位系统误差ΔA为0.82mrad、随机误差σA为0.54mrad,俯仰系统误差ΔE为1.21mrad、随机误差σE为0.78mrad。雷达天线的跟踪误差单调范围设为±3mrad,即只要目标偏差在天线指向中心±3mrad的范围内即可实现转雷达跟踪,所以引导概率为
(2)
4结束语
为实现对低空掠海飞行目标的有效跟踪,需要针对海杂波、多路径效应等进行针对性的设计,包括MTI/MTD技术、频率分集、偏轴跟踪、C2算法[8]、双波段复合跟踪、光电复合跟踪[9-10]、功率管理等。根据不同的目标对象需要综合运用不同的技术手段,其中雷遥协同跟踪是双波段复合跟踪的一种,经过试验验证,该方案技术成熟可靠,取得了理想的试验效果,为海杂波条件下雷达的低空探测积累了一定的经验。
参考文献
[1]李洋,陶然.海面导弹目标检测中的 RCS分析[J].中国科学,2014,44(12):2735-2742.
[2]刘钦.多传感器组网协同跟踪方法研究[D].西安:西安电子科技大学,2013.
[3]王德纯,丁家会,程望东.精密跟踪测量雷达技术[M].北京:电子工业出版社,2006.
[4]高剑.某雷达信号处理机的研制[D].西安:西安电子科技大学,2006.
[5]蒋希帅.雷达目标跟踪滤波算法的研究[D].大连:大连海事大学,2008.
[6]David K Barton.雷达系统分析与建模[M].南京电子技术研究所,译.北京:电子工业出版社,2012.
[7]盛骤,谢式千,潘承毅.概率论与数理统计[M].4版.北京:高等教育出版社,2008.
[8]姜来春.基于 C2算法海杂波抑制在低仰角跟踪时的应用[J].现代电子技术,2013,36(13):26-27.
[9]贺有.红外、雷达协同探测跟踪模型[J].红外与激光工程,2006,35(2):306-311.
[10]吴巍,王国宏,李世忠.雷达间歇辅助下雷达红外协同跟踪技术[J].火力与指挥控制,2012,37(1):155-158.
Radar& Telemetry Cooperative Tracking Strategy for Sea-skimming Targets
LU Changhai
(Sub-unit 92,Unit 91550 of PLA,Dalian 116023,China)
AbstractTracking and measuring of the low angle of the sea-skimming target is one of the difficult problems to be solved by the TT&C.The radar and Telemetry collaborative tracking is achieved by integrating design and use of a common antenna surface and the servo system with the desired results,which verify the effectiveness of this strategy.
Keywordscollaboration of radar & telemetry;tracking strategy;guide probability
中图分类号TN850.6
文献标识码A
文章编号1007-7820(2016)04-173-04
doi:10.16180/j.cnki.issn1007-7820.2016.04.046
作者简介:卢长海(1977—),硕士,工程师。研究方向:无线电测量。
收稿日期:2015- 09- 06
