
风云卫星云图自动识别追踪MCS的方法
2016-05-10 03:27:42郭庚常
电子科技 2016年4期
关键词:图像处理
段 炼,郭庚常
(中国民航飞行学院 空中交通管理学院,四川 广汉 618307)
风云卫星云图自动识别追踪MCS的方法
段炼,郭庚常
(中国民航飞行学院 空中交通管理学院,四川 广汉618307)
摘要根据中尺度对流系统(MCS)的识别判定标准,基于数字图像处理和模糊模式识别等技术,研究对MCS云团的自动识别与追踪。利用SUSAN边缘检测算子提取边界轮廓,并以亮温直方图结合云团的多个特征量构建追踪模板,实现云团追踪。通过对2014年5月10日12~17时的追踪实验发现,该方法可快速实现MCS云团的自动识别,并能实现对多时次MCS云团的连续有效追踪。
关键词MCS;图像处理;亮温直方图;贴近度
中尺度对流系统(Mesoscale Convective System,MCS)泛指由若干对流单体或孤立对流系统及其衍生的层状云系所组成的深对流系统,其水平范围约为十几千米至二三百千米,生命期约为1 h至十几h[1]。同时,MCS是我国主要的暴雨系统之一,也是造成我国夏季暴雨、洪涝灾害性天气的重要天气系统。
MCS常伴随着雷暴、暴雨、冰雹等灾害性天气,因此对人们的日常活动和生产造成较大影响,甚至是巨大损失。所以,准确识别MCS的位置,进而预测其发展和移动的趋势就显得尤为重要。过去,对MCS的预报和研究大多借助于常规观测资料,但受其时空分辨率低的限制,并不能满足追踪、分析和研究MCS的需要。随着静止气象卫星探测能力的增强,使得卫星遥感资料具有观测范围广、时空分辨率高的突出特点,这些是其他资料所无法比拟的,因此卫星数据已逐渐成为分析、研究、监测和预警MCS的主要数据来源。
目前,国内外利用卫星资料识别和追踪MCS已取得了一定的成果。如:白洁等[2]采用区域平滑滤波和阈值剔除相结合的方法,对强对流云团进行识别与追踪;李汇军等[3]应用连续小波基函数变换法提取对流云团,实现强对流云团边界的分割;Peak与Tag[4-5]提出多阈值启发式和人工神经网络相结合的方法,将云图分割成与天气系统相联系的云区;Arking等[6]对云团做傅里叶变换,使用傅里叶相位差估计云团的移动。
1MCS的定义
国内外学者对MCS发生和发展过程已进行过诸多个例分析和数值模拟,尤其是对尺度较大的中尺度对流复合体(MCC)的研究。对MCS进行普查,很大程度上为更全面的了解和分析MCS提供了便利。在我国,马禹等[7]普查了1993~1995年我国夏季8.5个月的MαCS,同时和陶祖钰等[8]采用类似Maddox定义MCC的方法,结合Orlanski[9]α-中尺度和β-中尺度对流系统的划分标准,重新定义了基于静止卫星红外云图普查MαCS和MβCS的标准。在该普查标准中,首次提出了MβCS在普查中的最小尺度标准为:TBB值≤-32 ℃连续冷云区的短轴为1.5~3.0个纬距。费增平等[10]普查了2003年淮河大水期间的MCS,根据我国造成剧烈灾害性天气的系统的空间尺度特征,重新修订了MCS的最小尺度标准,即TBB≤-52 ℃连续冷云区的直径≥20 km。本文根据我国强对流系统及其云团的物理量特征,结合费增平等对MCS最小尺度标准的修订,确定文中MCS识别和追踪的判据,如表1所示。
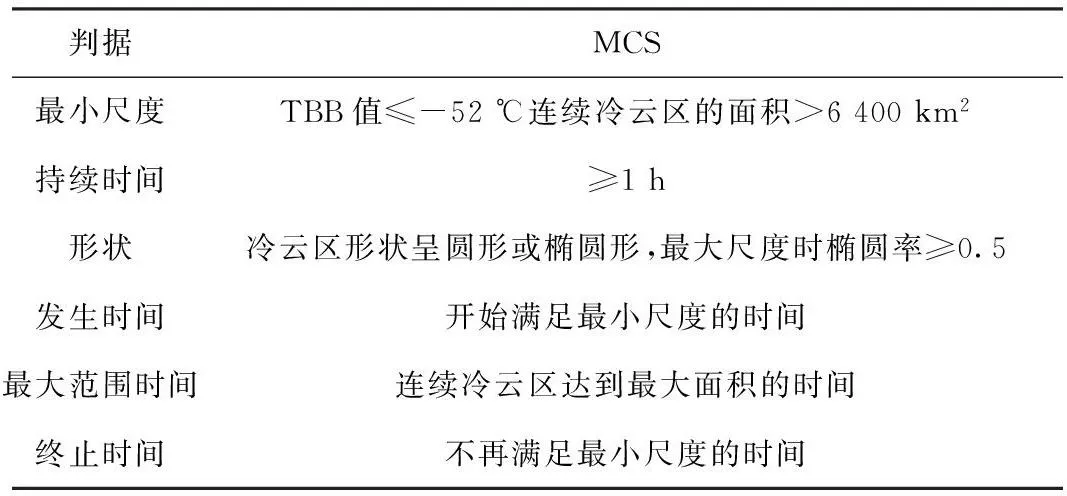
表1 本文MCS识别和追踪的判据
2MCS的自动识别
2.1获取灰度卫星云图
本文使用的卫星资料是从国家卫星气象中心下载的,FY-2E标称格式平均相当黑体亮温产品数据,并以该数据为基础转换出识别所需的灰度卫星云图。
从原始卫星数据直接转换得到的灰度图像,将夹杂着包括地表和大气在内的各种物体的红外辐射,因此整张卫星云图看起来模糊不清。为获取较清晰且云团边界较明显的灰度图像,文中取阈值180 K(TBB值),剔除不相关物体的黑体亮温值,即TBB值<180 K时将不参与灰度图像转换。灰度卫星云图如图1(a)所示。
2.2滤波预处理
从卫星数据中转换出的灰度图像,不可避免地会存在一些干扰和噪声,所以在识别前需要对图像进行预处理。文中采用中值滤波的方法消除噪声干扰。在识别MCS时需要较为鲜明的轮廓特征,以便提取轮廓,所以结合锐化滤波对图像进行二次滤波处理,以加强图像的轮廓特征。
中值滤波:采用3×3滑动窗口,将邻域中的像素按灰度级排序,取中间值为输出像素,数学描述如下[11]
(1)

锐化滤波:选用3×3的线性锐化滤波器模板,系数取值为[0 -1 0;-1 4 -1;0 -1 0],即为拉普拉斯算子。离散函数的拉普拉斯算子表达式为
(2)
2.3MCS的轮廓提取
灰度卫星图像经过两次滤波处理后,可用来进行进一步的数字图像处理。对MCS进行轮廓提取,其实就是阈值判断并剔除的过程。在此过程中,涉及两次阈值判断,分别是黑体亮温(TBB)阈值和面积阈值判断。
(1)黑体亮温阈值。文中按照MCS判据选取黑体亮温阈值为221.15K(-52 ℃),并作为灰度图像二值化的依据。二值化过程,即是以1和0分别表示亮温值低于和高于阈值的像素点。二值化图像如图1(b)所示;
(2)面积阈值。按照MCS判据,要求当TBB值低于-52 ℃时连续冷云区的面积>6 400km2。由于风云二号卫星的分辨率为5km,所以面积阈值取256,即在二值化后的图像中剔除像素点总数<256的区域。
经过黑体亮温阈值和面积阈值剔除后的二值化图像如图1(c)所示,此时已完成卫星云图的二值化和MCS识别判据的初步判断,在此二值化图像的基础上,便可提取MCS的边界轮廓。文中使用SUSAN边缘检测算子识别边界轮廓,因其在运算过程中不涉及梯度的计算,故对噪声图像的边缘检测效果优于传统的边缘检测算法[12-13]。提取轮廓结果如图1(d)所示。

图1 MCS的自动识别
2.4特征值计算
识别和追踪MCS需要对其进行完整的描述,即涉及描述云团特征的特征值的计算。在后续的追踪过程中,需要构建追踪模板,均与特征值计算有关,需要计算的特征值包括:周长、面积、圆形率、体态比、质心、中心矩、亮温直方图等。
周长:假设待求区域的轮廓线由N+1个点组成,坐标值标记为Ci(x,y),i=1,2,…,N,则周长C为
(3)
面积:区域面积的求解转化为区域内像素点数目的计算,云图的分辨率为5 km,所以单个像素点的面积为25 km2,设N为区域内像素点数,则面积S=25×N;
圆形率:椭圆率的一种近似表达,用来表征区域边界形状的复杂程度,计算
E=(4π×S)/C2
(4)
体态比:区域在x轴上投影的长度/区域在y轴上投影的长度,即
(5)
质心:用来表征云团所在的位置,其计算公式为
(6)
其中,xi,yi为像素点的网格坐标值;f(i)表示第i个像素点处的亮温值。
中心矩:用来反映区域的形状特征,且具有平移不变性。设f(i,j)为(i,j)点的亮温值,对其进行归一化处理

(7)
则g(i,j)的p+q阶中心矩为
(8)
其中,(m,n)为区域的中心坐标。
亮温直方图:该直方图的思想来源于灰度直方图。亮温直方图可表示为一个关于亮温值的离散函数
(9)
其中,n是单个MCS云团亮温值像素点总数;nk是云团中第k个亮温级(亮温值向下取整)的亮温值像素点总数;rk是第k个亮温级,k=0,1,2,…,400。如图2所示为两个不同MCS云团的亮温直方图。

图2 两个不同MCS云团的亮温直方图
3MCS的自动追踪
3.1追踪匹配模板的构建
匹配模板的构建是以特征值为基础,但在构建前需要对特征值构建模板的可行性进行评估。即对相邻两个时刻MCS的单一特征值进行相关值计算,并进行相应的追踪实验,验证该特征值的追踪有效性。文中采用最小平均绝对差值函数(MAD)进行相关值计算,MAD定义如下[14]
(10)
其中,i=1,…,M,j=1,…,N。
根据MAD的相关值计算进行了追踪实验,选用云图时次为2014年5月10日的12时和13时,如图2所示为圆形率和周长的追踪对比结果。试验中根据计算结果,将平均绝对差值最小的两个云团认为是同一云团,并标记上相同的英文字母。实验发现,A,B云团在采用周长的实验中,可较好地实现追踪,如图3(c)所示。而采用圆形率的实验中,A云团的追踪效果较差并出现了追踪错误,如图3(b)所示。C云团在13时已消散,但在13时次出现的新云团与C云团极其相似,实验中根据计算结果将其视为同一云团,这一错误结论归因于单一特征值追踪,所以只用于追踪有效性评估。

图3 识别结果与匹配结果
根据多次实验和总结发现,计算的特征值中,圆形率和体态比不具有较理想的匹配效果,而周长、面积、质心、中心矩、亮温直方图等可获得较理想的匹配效果。所以,文中确定由周长、面积、质心、中心矩、亮温直方图等特征量构建匹配模板。
由于涉及多个特征值的匹配,现引入模糊数学中贴近度的概念,由多个特征值组建模糊集,利用贴近度来表征两个模糊集的接近程度。文中使用海明距离来计算两个集合的贴近度,归一化处理后的计算公式为
(11)
单个MCS云团的亮温直方图存储方式为1×400的矩阵,第一位存储最低亮温值,最后一位存储亮温值<221 K的像素点数,其它位自动存储相应的亮温级数据,这样每个MCS云团对应一个亮温直方图数据集。
3.2MCS追踪实验
在追踪过程中,对每一时次中识别出的MCS进行逐一特征值计算,并组建模糊集,即以周长、面积、质心、中心矩等特征值组建一个模糊集,以亮温直方图数据集组建另一模糊集,并分别计算贴近度,最后将两个计算结果乘以不同权重系数并相加,作为最终贴近度计算值。相邻两时次中,根据贴近度计算结果,选取最大贴近度者作为同一目标。
追踪实验发现,只按照贴近度匹配出的追踪结果,存在一定的误差,并不能很好地实现较高准确率的追踪。为消除这一误差,根据强对流云团的最大移动速度,一小时内最大移动距离不超过180 km,对贴近度计算结果进行二次计算并判断。图4所示为部分追踪实验结果。
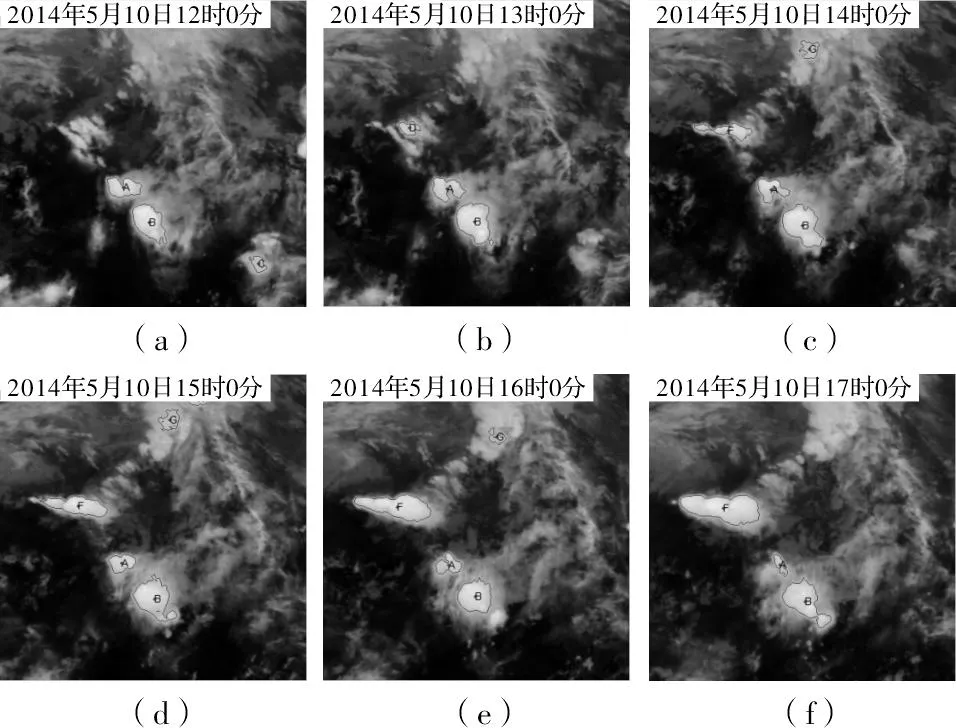
图4 2014年5月10日12~17时MCS的追踪实验
追踪自动标记的原则:第一幅图依次按英文字母顺序标记,后续时次的云图根据追踪结果将同一云团标记相同的字母,新生云团在原有字母的基础上递增标记。对于大面积、多时次的MCS追踪时,将涉及多个云团的标记,文中按照26个英文字母循环标记的方法依次标记。
追踪结果中看到,13时的D云团和14时的F云团,可认为是同一云团,但14时的F云团由于云团面积拉伸较大,从而导致质心位置偏移较多,所以根据每小时180 km变化量判定为不同云团,因此导致追踪误差的存在。故文中将有新生云团并入而导致质心发生较大偏移的云团视作为新生云团,并更新字母加以标记。
4结束语
本文根据国内多次MCS普查工作而逐步修订完善的判定标准,提出了一种有效实现MCS自动识别与追踪的方法。该方法与人工识别相比具有快速、准确的优势,与常规观测资料相比可达到更广的观测范围和更高的时空分辨率,为实现MCS的实时观测和气候学特征研究提供了便利。
但该方法仍存在一定的不足,如在追踪试验中,示例的2014年5月10日6个时次的云团追踪,验证了自动追踪方法具有较高的准确性,但对于初生云团并入大云团或两云团的合并等引起云团质心位置发生较大偏移的情形,均会导致追踪结果存在一定的偏差。在后继研究中,需通过不断的实验探索云团质心偏差的合理区间,以进一步提高追踪的准确性,或寻求更有效的方法提高亮温直方图在追踪上的贡献值。
参考文献
[1]朱乾根,林锦瑞,寿绍文,等.天气学原理和方法[M].4版.北京:气象出版社,2000.
[2]白洁,王洪庆,陶祖钰.GMS卫星红外云图强对流云团的识别与追踪[J].热带气象学报,1997(2):63-72.
[3]李汇军,孔玉寿.应用连续小波变换提取对流云团[J].解放军理工大学学报:自然科学版,2005(2):181-186.
[4]Peak J E,Tag P M.Toward of automated in terpretation of satellite imagery for navy ship board plications[J].Bulletin of the American Meteorological Society,1992,73(7):995-1008.
[5]Peak J E,Tag P M.Segmentation of satellite imagery using hierarchical thresholding and neural networks[J].Journal of Applied Meteorology,1994,33(1):605-616.
[6]Arking A,Robert C L,Rosenfield A.A furrier approach to cloud motion estimation[J].Application Meteor,1978(17):735-744.
[7]马禹,王旭,陶祖钰.中国及其邻近地区中尺度对流系统的普查和时空分布特征[J].自然科学进展,1997(6):63-68.
[8]陶祖钰,王洪庆,王旭,等.1995年中国的中-尺度对流系统[J].气象学报,1998,56(2):166-177.
[9]Orlanski L A.A rational subdivision of scales for atmospheric processes[J].Bull Amer Meteor Soc,1975,56(5):527-530.
[10]费增平,王洪庆,张焱,等.基于静止卫星红外云图的MCS自动识别与追踪[J].应用气象学报,2011,22(1):115-122.
[11]张德丰.Matlab数字图像处理[M].北京:机械工业出版社,2009.
[12]Smith S M,Brady J M.SUSAN 2A new approach to low level image processing[J].Computer Vision,1997,23(1):45-78.
[13]马桂珍,房宗良,姚宗中.SUSAN边缘检测算法性能分析与比较[J].现代电子技术,2007(8):189-191.
[14]吕凤军.数字图像处理编程入门[M].北京:清华大学出版社,1999.
Research on Method for MCS Automatic Identification andTracking Based on FY Satellite Cloud Image
DUAN Lian,GUO Gengchang
(Air Traffic Management College,Civil Aviation Flight University of China,Guanghan 618307,China)
AbstractAccording to the criteria of the identification of mesoscale convective system (MCS),this paper researches on identifying and tracking MCS automatically by means of image processing and fuzzy pattern recognition technology.The SUSAN edge detector is used to extract the boundary contour,thus realizing cloud tracking via building tracking templates with brightness temperature histograms and multiple cloud cluster characteristics.The experiments on tracking MCS during the time 12 to 17 hour of May 10,2014 show that the method has the ability of identifying MCS automatically and quickly and tracking MCS of multi-time effectively.
KeywordsMCS;image processing;brightness temperature histogram;close degree
中图分类号P407.8
文献标识码A
文章编号1007-7820(2016)04-116-05
doi:10.16180/j.cnki.issn1007-7820.2016.04.030
作者简介:段炼(1968—),男,硕士,副教授。研究方向:航空气象资料分析。郭庚常(1989—),男,硕士研究生。研究方向:航空运行。
基金项目:民航飞行技术与飞行安全科研基地开放基金资助项目(F2011KF08)
收稿日期:2015- 09- 10
猜你喜欢
网络安全与数据管理(2022年2期)2022-05-23 13:25:30
电子制作(2019年15期)2019-08-27 01:12:12
制造技术与机床(2018年12期)2018-12-23 02:40:52
电子制作(2018年18期)2018-11-14 01:48:20
电子测试(2018年6期)2018-05-09 07:32:01
电子测试(2017年11期)2017-12-15 08:57:08
中国公共安全(2017年8期)2017-10-13 08:12:21
中国公共安全(2017年8期)2017-10-13 08:12:20
辽宁省博物馆馆刊(2016年0期)2016-05-17 10:00:56
电气化铁道(2016年4期)2016-04-16 05:59:46
