基于滑模变结构的PMLSM直接推力控制
2016-05-09 02:49:17赵晓娟山西水利职业技术学院山西运城044000
电力科学与工程 2016年1期
赵晓娟(山西水利职业技术学院,山西运城044000)
基于滑模变结构的PMLSM直接推力控制
赵晓娟
(山西水利职业技术学院,山西运城044000)
摘要:为了改善永磁直线同步电动机(PMLSM)传统直接推力控制(DTC)系统存在的定子磁链和电磁推力脉动大、逆变器开断频率不恒定、低速时高频噪音大等问题,将滑模变结构控制(SMC)引入到该系统中,通过设计滑模控制器来代替原来的磁链和推力滞环控制器。仿真结果表明:基于滑模变结构的PMLSM直接推力控制系统的动态响应速度并未受到影响,但磁链和推力的脉动大大减小,系统对参数摄动、外界干扰等具有较强的自适应性和鲁棒性,证明该系统具有可行性和有效性,能够同时兼顾永磁直线同步电动机直接推力控制的动态和静态性能。
关键词:永磁直线同步电动机;直接推力控制;滑模变结构控制
0 引言
永磁直线同步电动机(PMLSM)在拖动生产机械运行时由于去掉了中间传动机构,导致系统的非线性、耦合性、参数摄动、负载扰动等直接反映了直线电机控制系统的不稳定性,尤其是在永磁直线同步电动机的直接推力控制(DTC)中,定子磁链和电磁推力的控制均采用滞环比较器,脉动较大,逆变器开关频率不恒定又导致所提供的电压矢量实际值与期望值偏差较大,且低速时因转速脉动引起的高频噪声也大,控制精度难以达到要求。
基于上述问题,在之前的研究中曾采用空间矢量调制技术(SVPWM)技术代替原来的开关状态选择器,并在其中引入磁链预测的思想以输出连续的开关电压矢量,采用PI调节器代替原磁链和推力滞环控制器,减小二者的脉动,但PI调节器的引入导致系统对电机参数、转速、负载等的变化相对敏感,最终使控制系统的鲁棒性较差。
为了改进永磁直线同步电动机的直接推力控制系统,本文采用滑模变结构控制(Sliding Mode Control,简称为SMC),通过设计一个滑模控制器生成预期的电压矢量,使定子磁链和推力能在很大程度上跟踪给定值[1-4]。
1 PMLSM的数学模型
在建立PMLSM的数学模型前,先作出如下假设:忽略其铁芯饱和;忽略磁滞损耗和涡流损耗;忽略直线电机的初级齿槽效应;假设次级无阻尼绕组;在分析时只考虑初级基波磁动势,反电动势为正弦。
图1为各坐标系关系图,其中α-β为两相静止坐标系,d-q为两相旋转坐标系。
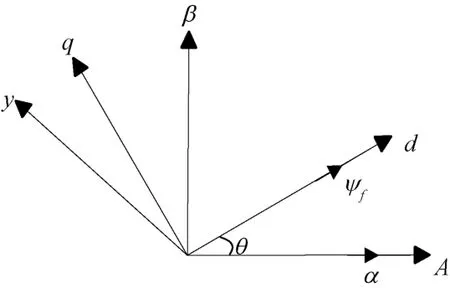
图1 各种坐标关系图
1. 1 α-β坐标系下的数学模型
电压方程:

磁链方程:
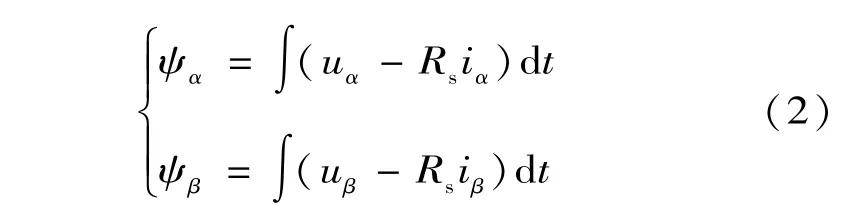

式中:uα,uβ,iα,iβ,ψα,ψβ分别为α轴和β轴上的电压、电流和磁链;Rs为初级电阻;Ls为初级电感;θs为动子位置;np为电动机极对数;τ为极距,P为微分算子。
1. 2 d-q坐标系下的数学模型
电压方程:

推力方程:
磁链方程:
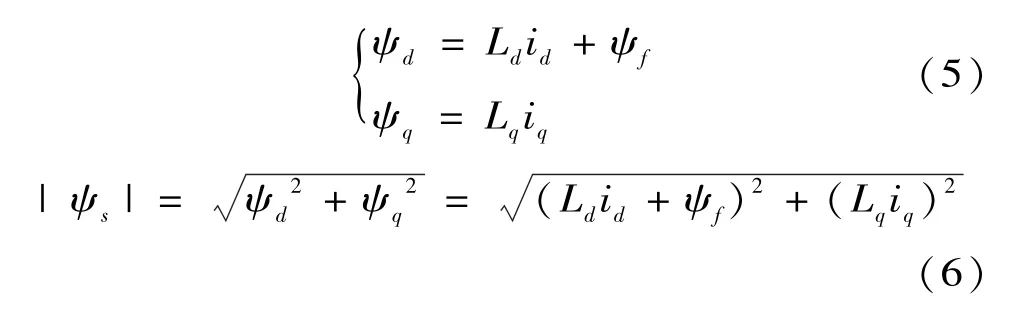
推力方程:
式中:ud,uq,id,iq,ψd,ψq,Ld,Lq分别为d轴和q轴上的电压、电流、磁链和电感;|ψs|为定子合成磁动势的模;ψf为动子永磁体磁链。
2 滑模变结构控制
滑模变结构控制(Sliding Mode Control,简称为SMC)是一种非线性的不连续控制,具有使系统随着时间有目的随时变化的开关特性,具有降阶和解耦的功能,通过一定的逻辑切换,把系统状态控制在预先设计好的轨迹上,一旦系统进入该轨迹,就不再受电机参数变化和外部扰动的影响,具有较强的自适应性和鲁棒性,且实现简单,响应迅速。所以滑模变结构控制的关键就是:根据系统所期望的动态特性准确设计一个切换超平面,即滑模面,通过确定切换函数,设计滑模控制器,迫使系统沿提前设计好的切换超平面到达原点。但在实际的滑模变结构控制中,由于执行机构存在一定的延迟,使系统在滑模面上下来回穿梭,造成系统的“抖振”,为了降低这种现象,本文采用指数趋近率来设计滑模控制器[5,6]。
2. 1 滑模控制器的设计
在设计滑模控制器之前必须要先设计好切换函数S,才能保证整个系统具有较强的鲁棒性。由永磁直线同步电动机的数学模型可知,电机电磁推力与定子磁链均与定子电流关系密切,故定义如下两个变量:

因为直接推力控制是对推力和磁链的误差进行控制,故我们选择二者的跟踪误差函数eF和eψ来构成切换函数S。
式中:eF=Fe∗-Fe为电磁推力的偏差量;为定子磁链的偏差量;Fe∗、ψs∗为推力和磁链的给定值;Fe、ψs为二者实时输出的实际值;K1、K2为滑模趋近速度增益,决定了控制系统状态变量到达滑模切换面的动态趋近律。
由滑模变结构控制原理可知,只有当S1=S2时,才能保证系统状态变量可由任意初始值滑动到切换面上,同时为了保证系统的动态品质,采用指数趋近律来设计滑模控制器,则:

ε1、ε2、q1、q2的值均是可设计的,这样,当系统由外部向滑模面运动时,以幂指数的方式趋近滑模面,能在较短的时间内到达切换带,速度较快;而当系统运动点进入切换带后,由于穿越滑模面的运动与误差的绝对值成正比,上下振动的幅度会大大减小,在一定程度上降低了滑模控制器的“抖振”现象,直至最终稳定在原点上,误差为零。
结合PMLSM的数学模型,上式可变为:
式(12)可写成矩阵的形式,如下所示:
则滑模变结构控制器的控制规律为:

2. 2 系统稳定性分析
为了保证系统在正常运动阶段能够趋近且进入滑模状态,并可以稳定在滑模阶段,这里用李雅普诺夫函数(Lyapunov)对所设计的滑模控制器进行稳定性分析。

将(11)式代入(15)式得:

由于ε1、ε2、q1、q2均为正数,所以S与εsgn( S )+qS同正或者同负,证明了V·<0,即该滑模控制系统是存在且渐进稳定的。
3 PMLSM直接推力控制系统
基于滑模变结构的PMLSM的直接推力控制系统结构框图如图2所示。其工作过程为:由逆变器输出的三相定子电压和电流首先经过Clark变换,输出为α坐标和β坐标下的电压和电流,该电压和电流经过Park变换后称为d-q坐标系下的电压和电流,之后经过磁链和推力模型输出定子磁链和电磁推力的实时计算值,另外还得到定子磁链的功角变化量θs,磁链和推力的实际值分别与它们的给定值进行比较,得到磁链和推力的偏差量εψ和εF,将该偏差量及d-q坐标系下的磁链、电流和θs一起送入滑模控制器模块进行计算得到ud、uq,再进过Park反变换得到uα、uβ,最后经过空间矢量调制环节得到逆变器开关状态变量Sabc,控制逆变器对应开关器件的开断,输出相应的电压矢量去控制永磁直线同步电动机的运行。
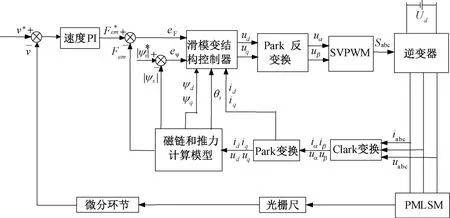
图2 基于滑模变结构的PMLSM直接推力控制系统原理框图
4 仿真分析
对永磁直线同步电动机基于滑模变结构控制的直接推力控制系统进行仿真实验,仿真中所用到的电机参数为:Rs=1. 8 Ω,Ls=2. 7 mH,ψf=0. 28 Wb,τ=45 mm,M=10 kg,Bv=0 N·m/s,该直线电机为8极电机,且仿真中给定速度为V∗=0. 45 m/s,定子磁链给定值为ψs∗=0. 28 Wb,电机起动时所拖动负载为100 N,运行过程中该负载在1 s时突变到300 N[7,8]。
图3~6为永磁直线同步电动机基于滑模变结构的SVPWM直接推力控制与传统直接推力控制的仿真结果对比图。从图3、图4对比图可以看出,前者的定子磁链轨迹更光滑,磁链幅值波动减小;图4、图5的对比图可得,改进后系统的动态响应时间并未受到影响,尤其是1 s负载突变时,基于滑模变结构的SVPWM直接推力控制系统的推力和速度的脉动明显减小,“抖振”时间很短,推力和转速均很快恢复了稳定。
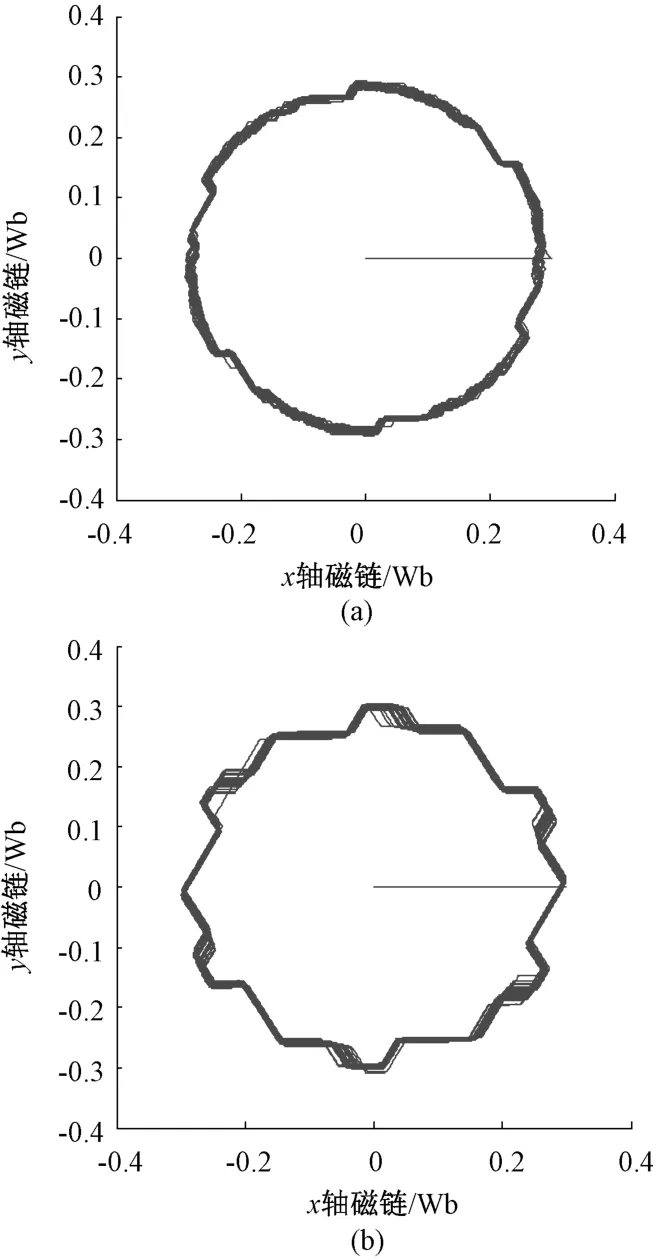
图3 磁链轨迹对比图
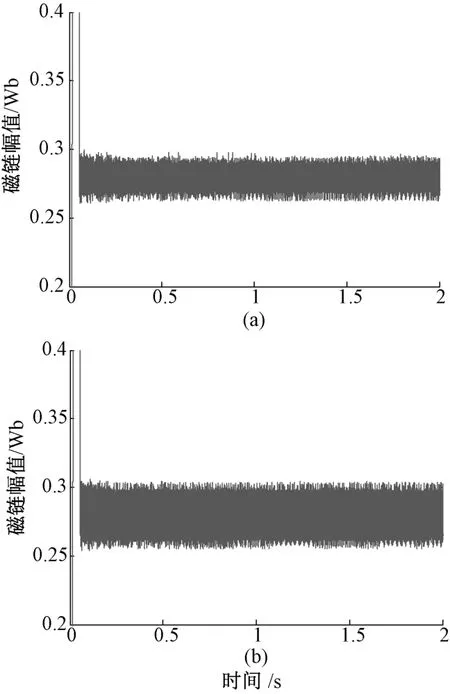
图4 磁链幅值对比图
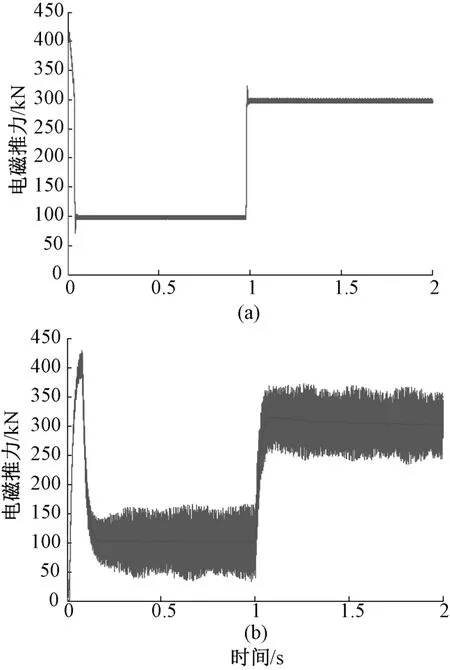
图5 电磁推力波形对比图
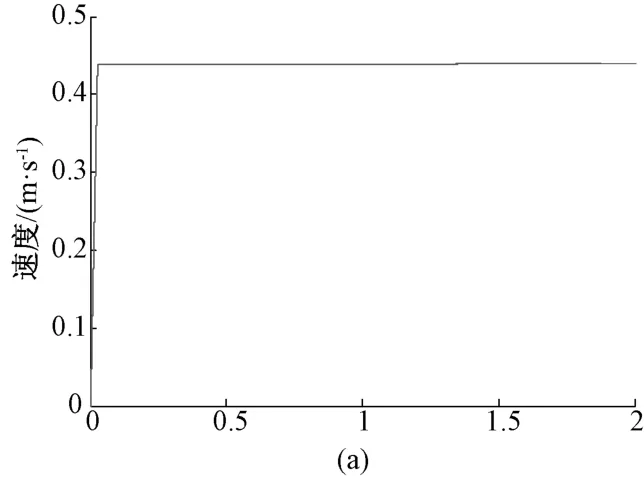
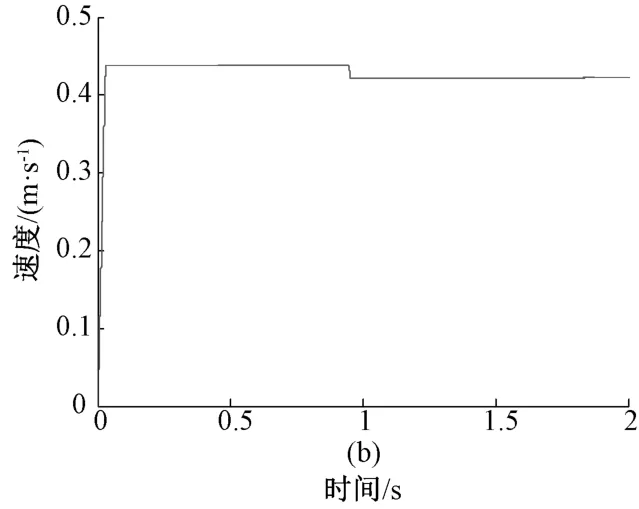
图6 转速波形对比图
5 结论
本文针对永磁直线同步电动机的直接推力控制进行研究,设计了基于滑模变结构的PMLSM直接推力控制系统,并在Matlab/Sim⁃link环境下进行了仿真实验,验证了滑模控制器的引入使定子磁链和电磁推力能够更好地跟踪其给定值,并且采用指数趋近率减小了系统的“抖振”问题,所设计系统具有更强的鲁棒性和抗干扰性,在一定程度上改善了其动、静态性能。
参考文献:
[1]陈伯时.电力拖动自动控制系统—运动控制系统[M].北京:机械工业出版社,2006.
[2]张玉地,钱炜,孙福佳,等.基于DSP的PMSM伺服控制系统设计[J].电力科学与工程,2015,31 (3):58-62.
[3]刘畅.基于滑模变结构的同步电机SVM直接转矩控制的研究[D].济南:山东大学,2008.
[4]李新宇,马明智,廖颜沛.异步电机直接转矩控制系统研究[J].电力科学与工程,2013,29(7):27-32.
[5]贾洪平,贺益康.永磁同步电机滑模变结构直接转矩控制[J].电工技术学报,2006,21(1):1-6.
[6]程攀.基于滑模变结构的异步电机直接转矩控制系统研究[D].昆明:昆明理工大学,2014.
[7]TANG L,RAHMAN M F.A new direct torque control strategy for flux and torque ripple for induction motors drive by using space vector modulation.[C]//Power Electron⁃ics Specialists Conference,2001.PESC.2001 IEEE 32nd Annual.IEEE,2001:1440-1445.
[8]张俊喜,张春喜.基于Matlab/Simulink的异步电机直接转矩控制系统仿真[J].电力科学与工程,2006,22 (2):59-62.
PMLSM Direct Thrust Control Based on Sliding Mode Variable Structure
ZHAO Xiaojuan
(Shanxi Conservancy Technical College,Yuncheng 044000,China)
Abstract:In order to solve those problems associated with the traditional direct thrust control(DTC)of permanent magnet linear synchronous motor(PMLSM),such as the flux linkage and thrust ripple,variable switching frequen⁃cy,and larger high frequency noise at very low speed,sliding mode control(SMC)is introduced into the control system in this paper to replace the original flux and thrust hysteresis controllers.The simulation results show that the dynamic response speed is not affected in the DTC system based on SMC of PMLSM,but the ripple of stator flux and electromagnetic thrust are greatly reduced,and the system has strong adaptability and robustness in param⁃eter perturbation and external disturbance.It is proved that the system is feasible and effective,and both the dy⁃namic and static performances of DTC are considered by the proposed system.
Keywords:permanent magnet linear synchronous motor;direct thrust control;sliding mode control
作者简介:赵晓娟(1985-),女,助教,主要研究方向为电力电子与电力传动,E⁃mail:xiaojuan308@163. com。
收稿日期:2015-10-29。
中图分类号:TM359. 4
文献标识码:A
DOI:10. 3969/j. issn. 1672-0792. 2016. 01. 013