
基于星敏感器原理的空间微弱小目标自动识别
2016-05-06 09:09谭小波唐武盛杨建坤衣文军
兵器装备工程学报 2016年3期
关键词:目标识别
谭小波,唐武盛,杨建坤,衣文军,贾 辉,刘 菊
(国防科学技术大学 理学院,长沙 410073)
基于星敏感器原理的空间微弱小目标自动识别
谭小波,唐武盛,杨建坤,衣文军,贾辉,刘菊
(国防科学技术大学 理学院,长沙410073)
摘要:复杂星空背景下,无特定标识的微弱小目标经常会阻碍航天器的飞行任务;由于目标成像尺寸小、发光特点与星点类似,无法通过常规目标识别手段进行辨识;针对该问题,利用星敏感器绝对测量的优势,提出基于星敏感器原理的空间微弱小目标识别方法;该方法利用鲁棒性较好的网格算法识别采集星图上的大部分恒星,将漏星和目标标记出来,再利用角距法加以区别,实现目标识别;通过实验仿真,完成了对含微弱小目标的具体星图的星点及目标识别,并针对过程中出现的参考星和返回目标结果的选择标准问题进行了讨论分析,验证了基于星敏感器原理的空间微弱小目标识别方法的可行性。
关键词:星敏感器;微弱小目标;目标识别;网格算法
Citation format:TAN Xiao-bo, TANG Wu-sheng, YANG Jian-kun, et al.Automatic Identification on Weak and Small Target in Space Based on Principle of Star Sensor[J].Journal of Ordnance Equipment Engineering,2016(3):71-76.
在飞行器执行的任务中,对空间非星目标的识别与跟踪占有重要地位。在复杂的星空背景下,空间微弱小目标由于成像尺寸小,发光特征与恒星类似,具有一定运动性等特点,混杂于浩瀚星海中无从辨识。处理复杂背景下目标识别的方法很多,如帧间差分、背景抑制、傅里叶梅林图像配准、边缘提取等算法,但上述大多数方法除了需要前后多幅图像的对比之外,仅适用在一些特性明显的目标,对微弱小目标不一定适用[1-2]。星敏感器体积小、精度高、自主性强,具有绝对测量的优势[3]。利用星敏感器进行飞行器自主姿态确定,是当前飞行器常用的方法。星敏感器在进行星图识别时,充分利用了恒星的星等、位置等信息,考虑利用相关原理检测混杂于恒星中的微弱小目标,在星图识别阶段就能将目标同恒星区别开来。在星图识别过程中同时进行目标识别,大大提高了空间系统的运行效率[4-5]。
为此,本文从星敏感器原理出发,提出结合星图识别原理的目标自动识别方法,开展相关实验仿真,验证了该方法在识别空间微弱小目标上的可行性。
1原理描述
结合星敏感器原理,对空间微弱小目标进行识别,就是在含有目标的星图中将微弱小目标同恒星区别开来。借助星敏感器,实现对星图中所有恒星的辨识,自然筛选出目标。
1.1星敏感器识别星图
星敏感器是飞行器姿态测量的重要仪器,目前能够实现完全的自主姿态确定。图1为星敏感器用于飞行器姿态测量的系统框图。

图1 星敏感器工作过程示意图
其中,模式识别是星敏感器工作过程中的核心步骤。目前,星敏感器常用的星图识别算法有3种:三角形法、匹配组法和网格法[6]。本文利用鲁棒性较好的网格算法识别星图,其核心思想是:对每颗观测星以其周围一定范围的星在特定网格上的二值化投影生成的网格图像模式作为该星的识别特征,再与导航星模式库进行搜索比对,将最大一致的图像模式所对应的导航星作为识别结果[7]。
1.2星敏感器提取星点信息
星敏感器CCD采集星图后,进行星点提取得到模式识别特征。星点提取是从星图中提取星点像位置坐标的过程,通过星点提取可以得到拍摄星点在星敏感器坐标系下的位置矢量,该位置矢量的测量误差为星敏感器的主要误差来源。网格法对于星点提取过程中产生的位置噪声及星等噪声有较好的鲁棒性,而且算法中二值化的模式库存储量大,搜索匹配迅速[8]。综合来看,网格法具有较快的识别速率和更高识别效率。
1.3结合星敏原理识别空间微弱小目标
空间微弱小目标呈现多种不易检测的特点,其中最不易处理的情况是目标的发光特点及成像尺寸与恒星接近,从拍摄的星图上看,并不能将其与众多星点区别开来。如图2所示,左边是不含目标的星图,右边是含目标的星图,不加以区分,几乎看不出有目标的存在:
图2 星图对比
网格法可将目标识别的可能性保留至下一阶段,根据网格法最大一致的原理,单幅正确识别的星图,也可能有少部分恒星属于未识别范畴。对于这部分未识别恒星,统称为漏星。
在含有空间微弱小目标的星图中,目标被当做未识别的漏星来处理,在正确识别的星点数目达到网格法要求的阈值时,该星图仍然可以正确识别。要将目标检测出来,必须将未识别的漏星全部找出,此时网格法只能提供已经正确识别的恒星信息,对于所剩其余星点(可能含有微弱小目标),需要用到其他的方法——三角形法中提到的对角距方法来识别漏星。
首先,给出对角距概念。图3为星敏感器成像模型示意图,上方为实际星点在星空中的位置分布,第i颗星的赤经和赤纬分别是(αi,δi),经过焦距为f的透镜L,在星敏感器感光平面上成像,坐标为(xi,yi):
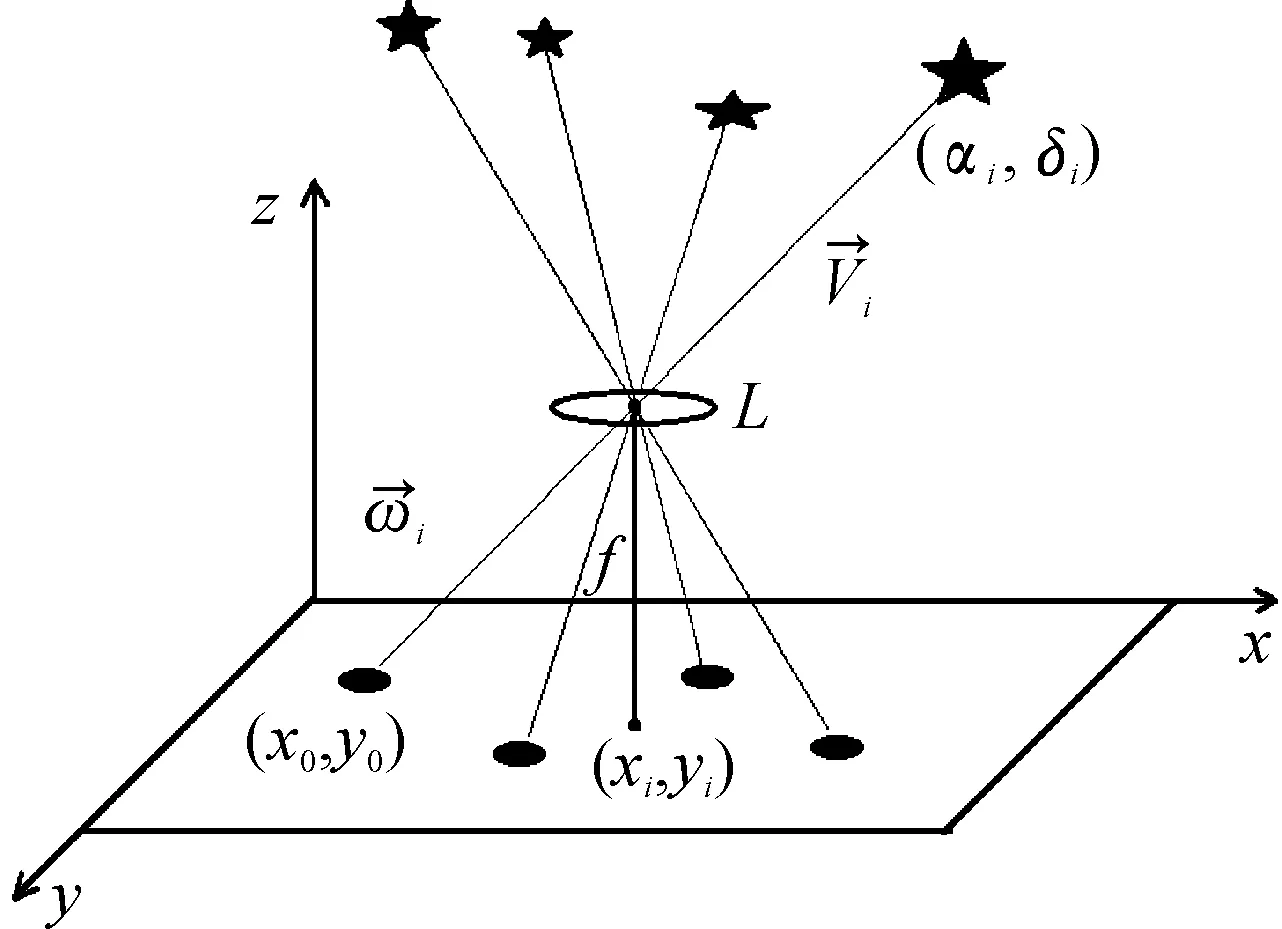
图3 星敏感器成像模型示意图
则第i颗星在星表中的唯一惯性适量为
成像后在星敏感器坐标中获得的测量向量为
其中(x0,y0)是透镜f主光轴与像面的交点。当星敏感器处于某一姿态矩阵A时,第i颗星的理想测量矢量ωi和其固有的惯性矢量vi的关系如下:
则定义第i颗星和第j颗星之间的星对角距为αij,其余弦值为
因为A是方向余弦矩阵,故
ATA=I
由于星对角距的唯一性,那么只需要在导航星库里计算找到两颗星,使得
ε是给定的测量误差容限,就能判定星点被正确识别。
在漏星识别的过程中,可以使用已经正确识别星点的角距信息,结合导航星库中已经计算好的对角距参数,确定未识别的星点。该方法能够避免三角形法本身关于特征维数的限制,从而解决冗余匹配的问题。因此在网格法基础上,结合对角距的概念,可以进一步识别漏星,保证所有恒星被正确识别,进而筛选出微弱小目标。
2实验过程及分析
为验证1.3节中微弱小目标识别方法的可行性,首先设计实验进行不含目标的星点识别,确保能够正确得到所有恒星信息;其次以含微弱小目标的星图为对象,进行上述处理过程,确保能够正确得到目标信息。
2.1实验方案设计
观测星图中大部分星点的识别是靠星敏感器网格识别算法实现的。经典网格识别算法的流程为:对观测星点均建立特定网格,将其它星点位置对该网格进行二值化投影,产生的模式识别特征与导航星模式库匹配。同观测星模式最大一致的匹配导航星就是识别结果[9]。成功识别的星图中,所有恒星的识别状态会以编号的形式记录下来,包括正确识别和未识别的恒星信息,将会利用到漏星识别的过程中。
得到的未识别星点中有可能包含目标,此时将目标作为漏星处理,进行统一的漏星识别过程。当漏星正确识别后,剩下的即为目标,具体的识别流程如图4所示。
1) 利用网格法识别星图,如图4(a),圈中的均为正确识别的恒星,编号为Ii。虽然星图正确识别,但仍有部分星点未识别,记为Ui。未识别漏星中可能包含目标Ti;
2) 选取已经正确识别的恒星中某一颗导航星Ir,计算其角距ω1。如图4(b),在导航星库中,以Ir为中心,视窗对角线长度为半径画圆。求此圆范围内所有导航星的角距,并一一与ω1求对角距,记为α1j,对应地记录导航星编号,信息集合成为导航星Ir的对角距模式库;

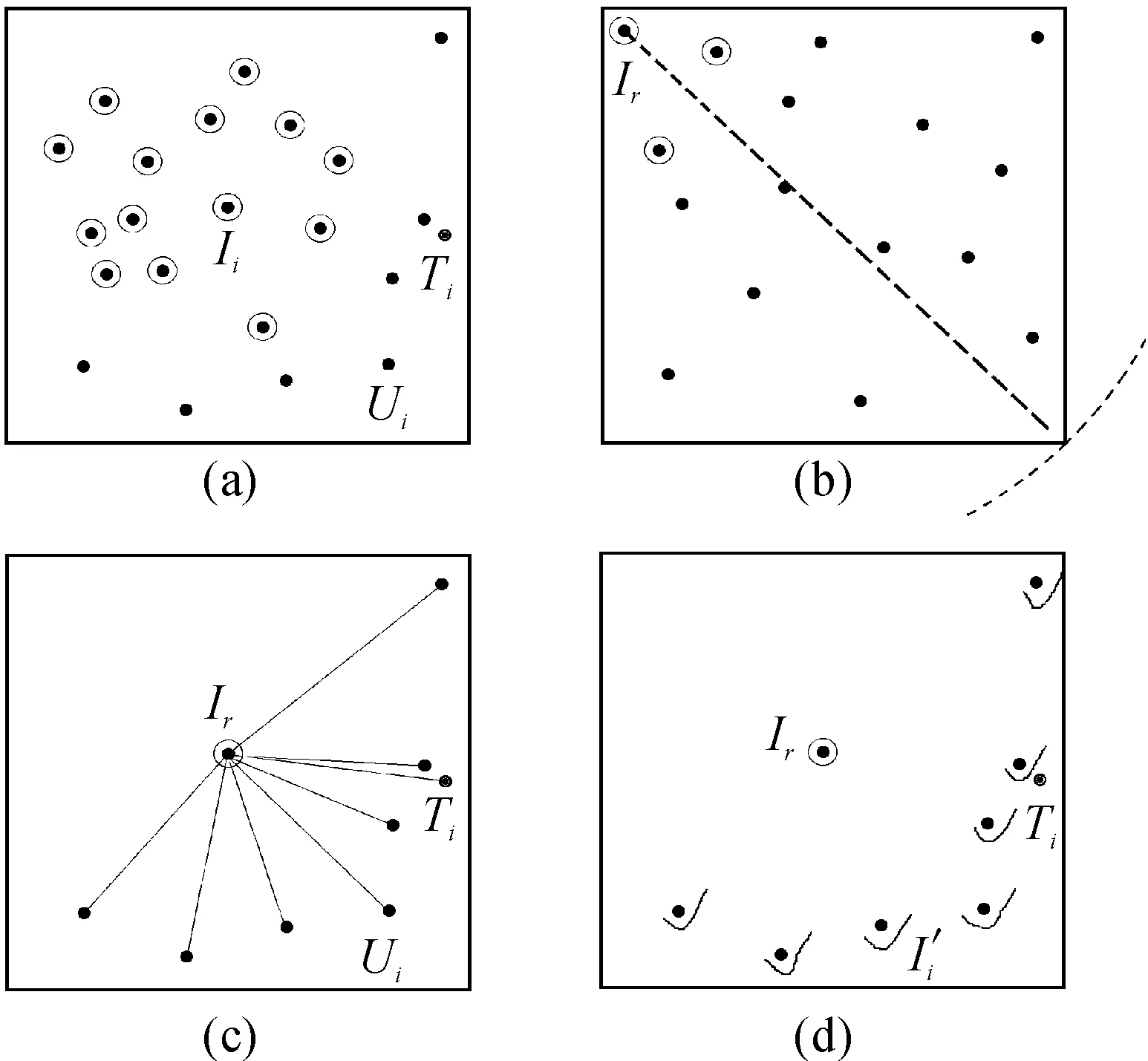
图4 微弱小目标识别步骤
2.2识别全部星点
按上述实验设计,从SAO (Smithsonian Astrophysical Observatory) 星表中选取星等小于6的1 563颗恒星作为导航星,构成导航星库Rstar。记录导航星赤经RA,赤纬DE,星等Mag,导航星号m等四维信息。采用视场像素为512×512的CCD面阵相机作为成像器件,视场为10°×10°,星点位置标准差设定为0.1像素,划分网格数量为传统的40×40个。按照标准步骤,建立含1 563个导航星模式向量的模式星库LookupTable。用星敏感器从导航星库Rstar中产生100幅星图作为识别对象,使用网格法对该100幅星图进行识别,具体统计结果如图5所示,第1列是每幅星图包含的已识别星点的信息,第2列是星数统计,分别为星图总星数、识别星数、误识别星数和未识别星数,第3列是不满足距离边界条件而无法识别的星点编号n。由此可以找到未识别星图和未识别星点。
网格法正确识别的星点信息均被记录下来,如图6(a),第1列是原始星图中星点的亮度编号n,第2列是识别出的星点在导航星库里的编号m,第3列是星点的赤经RA,第4列是星点的赤纬RE,第5列是星点的星等Mag。
和原始星图星点信息进行对比,如图6(b),可以看到n为2、12、18的星点未识别。此时,依据原始星图星点位置信息(第二、三列分别为X坐标和Y坐标),标记星图中正确识别和未识别星点。
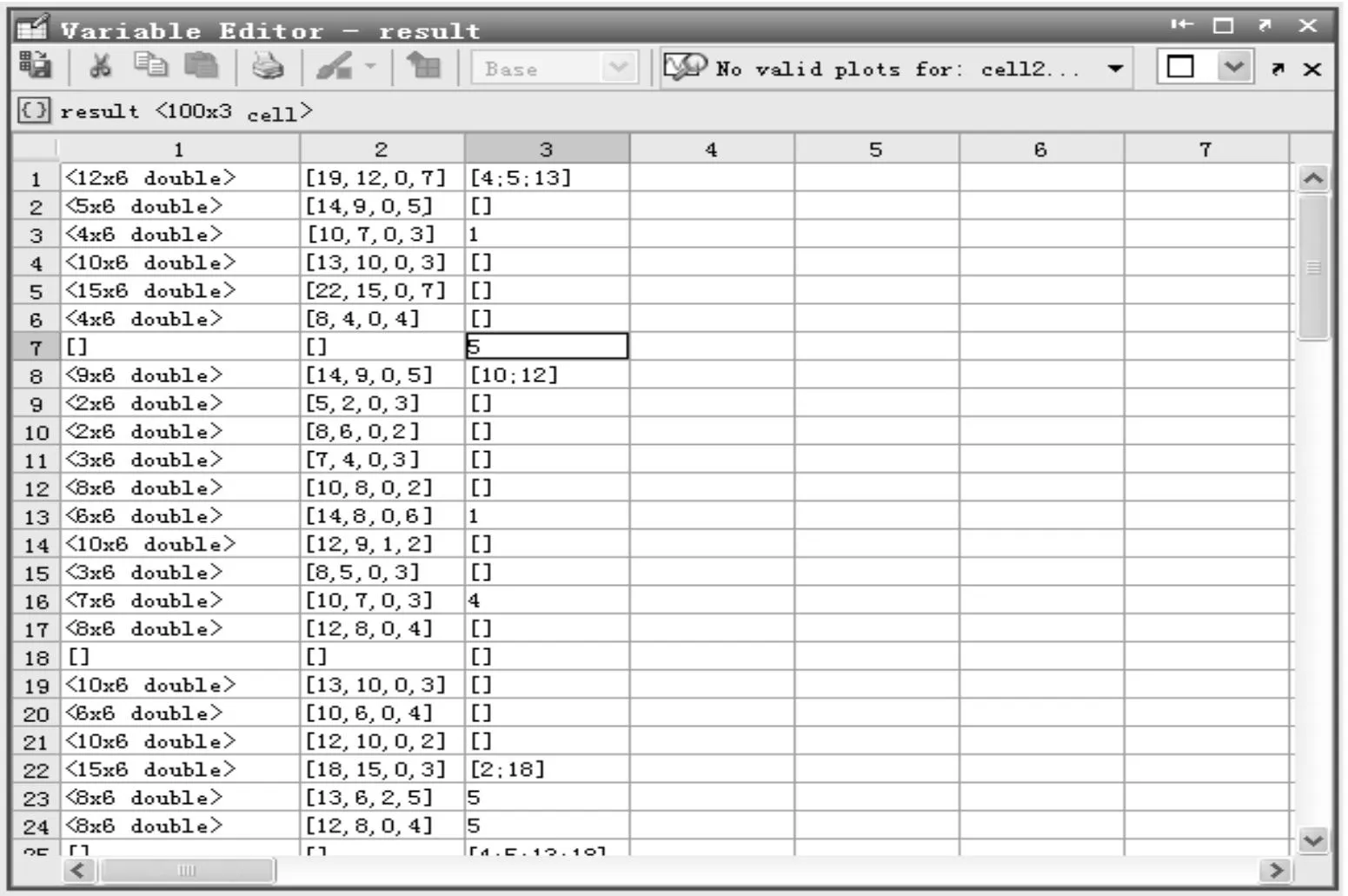
图5 识别星数统计
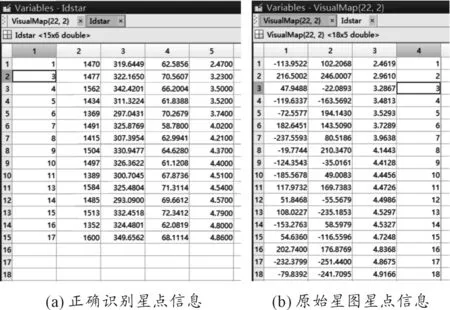
图6 星点识别结果对比
依照漏星识别的步骤,需要在正确识别的导航星中选择一颗作为参考星。从网格法原理出发,处于星图中央位置的恒星正确识别的置信率最高,则可选择建立网格时拥有最多投影元素的恒星。在网格法识别星图的过程中,已经将所有恒星拥有的投影元素个数记录在nMatch矩阵中,如图7,第1列为正确识别的星点亮度编号n,第2列为该星参与识别的周围导航星个数(该星拥有的投影元素个数),第3列为该星选择的临近星距离。
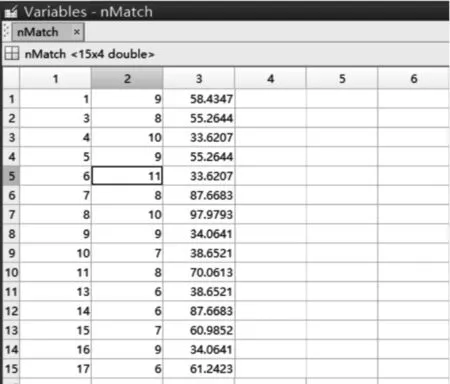
图7 正确识别恒星投影元素信息
对比可知,选择n为6的恒星作为参考星,计算其测量矢量ω1为:[0.035 6, -0.038 2, 0.998 6]。然后建立该星的对角距库,即回到导航星库中,以1 369号星为圆心画圆,计算其与该范围内所有导航星的对角距,形成参考星角距库,如图8,第1列是参考星号,第2列是范围内导航星号,第3列是对角距余弦值。

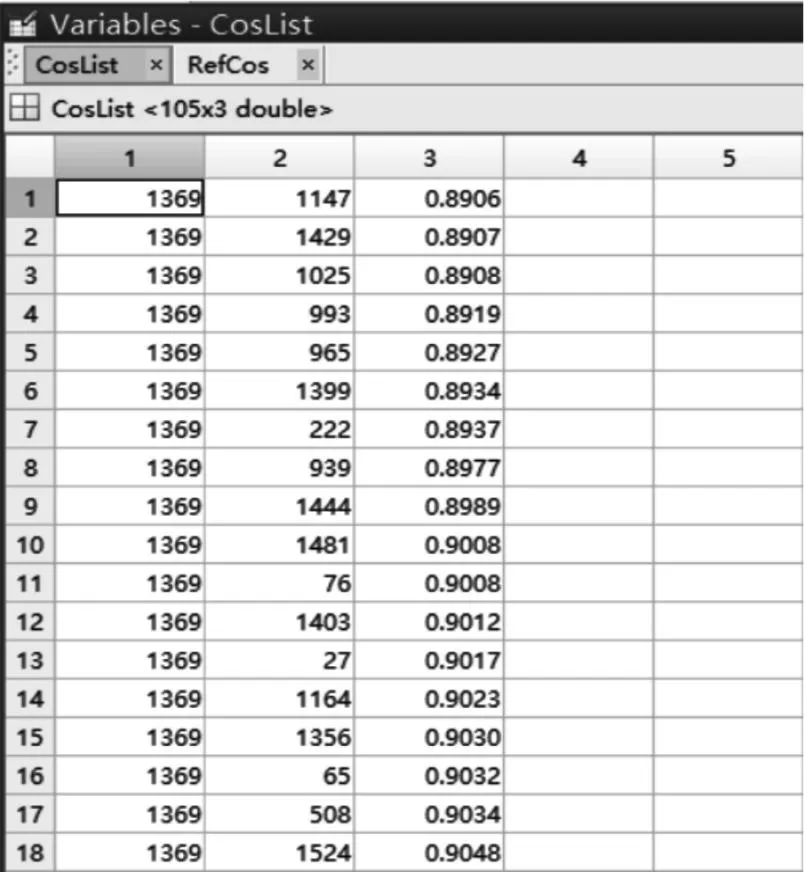
图8 1 369号参考星角距库
经过查找,满足条件的导航星为1 596号,如图9(a),第1列为参考星号,第2列为找到的导航星号,第3列为角距库中上述两颗星的对角距余弦值:
应用相同方法找出全部未识别星点的导航星号,如图9(b)所示,第1列是亮度序号n,第2列是从参考星角距库中确定的对应导航星号。至此,在网格法和对角距法结合使用的情况下,22号星图中所有18颗星点均被正确识别,方法可操作性较强。
2.3识别微弱小目标
在误差范围内,空间微弱小目标的位置信息不会和星库中的恒星重叠。因此在网格法结合对角距法识别星点的基础上,能够甄别出隐藏于众多星点中的微弱小目标。
在相同的实验条件下,模拟一空间非恒星目标进入星敏感器CCD视窗,CCD采集到星图如图10所示,包括目标在内,从CCD成像面提取到22颗星点。
经过上述过程进行实时分析处理,用网格法得到正确识别星点和未识别星点(含目标)的位置及亮度信息:22颗星点中有14颗恒星被识别,8颗未识别,图11是正确识别恒星的信息。

图11 正确识别恒星信息
依据参考星选择原则,将正确识别的41号导航星作为参考星,其与未识别恒星(包括目标)的对角距余弦值如图12(a)所示。

图12 第一参考星41号的匹配识别
回到41号参考星角距库中进行比对匹配,得到如图12(b)所示的结果。可以看到,在未识别的8颗星点中,有2颗仍未识别。考查对角距法识别漏星的过程,发现其中n=14的星点满足匹配条件的结果有两个,为1 437号和1 579号。进一步的条件限定,判定1 579号导航星更适合作为第14颗星点的识别结果,统计结果如图13所示。

图13 最终识别结果统计
由此可见,n=15的“星点”即为目标。
2.4改进分析与讨论
上一节主要描述了实验的过程和结果,本节将对条件的限定进行细致讨论。
1) 星敏感器均有一定的星图识别率,一般来说置信率应为95%以上。本实验采用星图为100幅星图中正确识别的星图。在采集星图的过程中,如若碰到星图未能正确识别的情况,自动识别过程会终止在目标检测之前的步骤,提前结束星图识别问题。
2) 参考星的选择问题。参考星的选择标准很多,但是跟对角距方法结合最紧密的是导航星的位置因素。处于视窗中心的导航星和其余恒星的对角距分布范围更广,在和参考星角距库对比匹配时误差更小。从网格法原理出发,拥有该位置特点的导航星即为建立网格时拥有最多投影元素的恒星,因此在记录正确识别星点信息的时候,同时记录了每个星点的投影元素个数,存储在nMatch矩阵里。
3) 在匹配对角距时采用的容差Δ。由于该数值要贯穿使用在未星点的重新识别和目标的检测上,所以需要一个能够甄别星点和目标的统一容差。
4) 最后,当微弱小目标和未识别星点一同进入漏星识别步骤,从实验过程看,不能求得正确结果的情况有两种:一种是有多颗星点与之匹配。该情况的产生是因为在相同的容差条件下,多个星点的对角距值均接近同一匹配值。如图14,1 437号和参考星的对角距余弦为:0.942 3, 157 9号和参考星的对角距余弦为0.941 9,两者与匹配结果0.942 0做差之后所得数值均小于容差Δ。

图14 两个满足条件的导航星
此时进行条件限定,即认为更接近匹配对角距数值的结果才是正确的匹配星点。程序语言如下:
if size(Cos,1)>=1
Abs=abs(Cos(:,3)-cos12);
[vv imin]=min(Abs);
ReId=[ReId;Unknow(i) Cos(imin,2)];
end
如果求得的结果(Cos)中不只1个,则求该对角距数值与匹配对角距数值(cos12)之差,取绝对值最小的星点作为结果,差最小说明更接近。
从以上的分析,可以将所有条件的限定与调整用统一的程序语言来实现,完成复杂星空背景下的微弱小目标自动识别,具体过程如下:
1) 用网格法正确识别标记星图上大部分星点、剩余漏星和目标;
2) 依照nMatch标准选择一颗已经正确识别的导航星作为第一参考星;
3) 计算所有未识别星点(包括目标)和第一参考星的对角距余弦;
4) 建立第一参考星角距库,进行对比匹配。选定对角距余弦容差Δ,进入统一条件判定:
如果满足容差条件,且结果唯一,则是漏星,记录导航星号;结果不唯一,作差找最小值为漏星,记录导航星号。如果不满足容差条件,进入第5步。
5) 选择第二参考星,建立角距库进行对比匹配。沿用相同对角距余弦容差Δ,进入统一的条件判定:
如果满足容差条件,且结果唯一,则是漏星,记录导航星号;结果不唯一,作差找最小值为漏星,记录导航星号。如果不满足条件,初步判定结果为目标。
在程序上能够实现第n参考星(n≥3)的角距库匹配,但到第二参考星判定星点时目标的置信率已经很高,无须进行更多繁缛的运算。
3结论
针对空间微弱小目标混杂于星点中不易辨识的问题,文章结合成熟的星敏感器技术,提出在星图识别阶段将目标区别开来的方法。从星敏感器星图识别和星点提取原理出发,选用鲁棒性更好的网格法作为实验基础。网格法能够正确识别星图中大部分星点,其余漏星和目标可以通过对角距法重新识别。实验中得到了100幅不含目标星图的星点识别情况。以第22幅图为例,一共提取星点18颗,网格法正确识别15颗,对角距法识别3颗漏星。随后在相同的实验条件下,引入一个非恒星点目标。包括目标在内从CCD平面提取了22个星点。网格法正确识别14颗,对角距法将7颗漏星同目标区分开来。经过多次实验,分析了识别过程中的条件限定和结果判定等细节,讨论给出了复杂星空背景下微弱小目标自动识别的统一方法。
参考文献:
[1]张路平,李飚,王鲁平.复杂空间背景下的弱小目标检测方法[J].红外与激光工程,2011(10):2048-2053.
[2]王学伟,李德明.一种空间弱小目标的图像检测方法[J].激光与红外,2009(1):78-81.
[3]王虎,苗兴华,汶德胜,等.宽视场大相对孔径星敏感器光学系统设计[J].光子学报,2005(12):1822-1824.
[4]朱长征.基于星敏感器的星模式识别算法及空间飞行器姿态确定技术研究[D].长沙:国防科学技术大学,2004.
[5]刘一武,陈义庆.星敏感器测量模型及其在卫星姿态确定系统中的应用[J].宇航学报,2003(2):162-167.
[6]SILANI E,LOVERA M.Star identification algorithms:novel approach and comparison study[J].IEEE Transactions on Aerospace and Electronic Systems,2006,42(4):1275-1288.
[7]NA M,ZHENG D,JIA P.Modified Grid Algorithm for Noisy All-Sky Autonomous Star Identification[J].IEEE Transactions on Aerospace and Electronic Systems,2009,45(2):516-522.
[8]MENG N,PEIFA J.A Survey of All-sky Autonomous Star Identification Algorithms[C]//1st International Symposium on Systems and Control in Aerospace and Astronautics,Harbin,China,2006:896-901.
[9]PADGETT C,KREUTZ-DELGADO K.A Grid Algorithm for Autonomous Star Identification[J].IEEE Transactions on Aerospace and Electronic Systems,1997,33(1):202-212.
[10]贾蒙杨.空间暗弱慢速目标的捕获跟踪控制技术研究[J].航天器工程,2015(2):96-101.
[11]李学夔,谭海曙,张焕明,等.高精度星敏感器的导航星识别定位算法研究[J].计算机工程与应用,2010(21):220-222.
[12]贾辉,杨建坤,李修建,等.星敏感器高精度星点提取系统误差分析及补偿方法研究[J].中国科学:技术科学,2011,41(1):69-76.
(责任编辑杨继森)
Automatic Identification on Weak and Small Target in Space Based on Principle of Star Sensor
TAN Xiao-bo, TANG Wu-sheng, YANG Jian-kun, YI Wen-jun, JIA Hui, LIU Ju
(College of Science, National University of Defense Technology, Changsha 410073, China)
Abstract:Under complex starry background, the weak and small target without any specific identification often hinders spacecraft’s mission. The weak and small target which is little with the image size, emitting characteristics similar to stars, can not be identified through the conventional means of target recognition. In view of the problem, using the superiority of star sensor absolute measuring, the method of weak small target recognition based on the principle of star sensor was proposed. The method identify collected most stars in the chart using robust grid algorithm, and marked the omitted star and objectives, then reused the angular distance method to distinguish and realized the target recognition. Through the simulation experiment, the recognition of specific stars and target in the map which contained the weak small target were realized. And in the process, the selection criteria of reference stars and return target were discussed, then the feasibility of the method to identify space weak small target based on principle of star sensor was validated.
Key words:star sensor; weak and small target; identification of target; grid algorithm
文章编号:1006-0707(2016)03-0071-06
中图分类号:O439
文献标识码:A
doi:10.11809/scbgxb2016.03.018
作者简介:谭小波(1992—),男,硕士研究生,主要从事光学图像采集与处理研究。
基金项目:国家自然科学基金资助项目(61107005)
收稿日期:2015-07-15;修回日期:2015-09-28
本文引用格式:谭小波,唐武盛,杨建坤,等.基于星敏感器原理的空间微弱小目标自动识别[J].兵器装备工程学报,2016(3):71-76.
【信息科学与控制工程】
猜你喜欢
数字技术与应用(2016年10期)2017-04-01
科技创新与应用(2017年6期)2017-03-23
中国新通信(2017年3期)2017-03-11
中国水运(2017年1期)2017-02-27
中国水运(2016年11期)2017-01-04
电脑知识与技术(2016年28期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
价值工程(2016年32期)2016-12-20
科学与财富(2016年28期)2016-10-14
现代电子技术(2014年22期)2014-11-14
