新一代智能座舱总体结构设计
2016-05-05 07:05吴文海张源原刘锦涛周思羽梅丹
航空学报 2016年1期
吴文海, 张源原, 刘锦涛, 周思羽, 梅丹
1. 海军航空工程学院 青岛校区, 青岛 266041
2. 海军航空兵学院, 葫芦岛 125000
新一代智能座舱总体结构设计
吴文海1, *, 张源原1, 2, 刘锦涛1, 周思羽1, 梅丹1
1. 海军航空工程学院 青岛校区, 青岛266041
2. 海军航空兵学院, 葫芦岛125000
摘要:传统座舱通过引入各种自动化功能,辅助飞行员完成任务,减小操控负担。随着战场态势变化的日趋繁杂,传统座舱设计辅助飞行员的能力达到了瓶颈,亟需研究总体结构设计改进方法,提升辅助决策能力。深入分析了传统座舱存在的问题,研究了适应新型战机的座舱设计,并综合运用态势评估、故障诊断等技术,以任务为核心,对新一代智能座舱的结构及其辅助决策等级进行了设计,阐述了各系统内部结构及功能,探讨了智能座舱与飞行员之间的关系转变。最后,梳理了相关技术途径,指明了下一步的研究重点。
关键词:智能座舱; 辅助决策; 总体结构; 辅助飞行; 设计需求
座舱[1]是飞行员获取外部态势信息、操控飞机、执行作战任务的工作环境。为了使飞行员能够更有效地获取外部态势,更精准地操控飞机,座舱内布置了许多显示器和操控装置,并且引进了许多自动化技术。但是,采用传统设计理念设计的座舱虽然能使飞行员在一定程度上能够摆脱任务飞行中枯燥的、程序化的工作,但却导致现代战机内座舱信息越来越繁杂,飞行员判读信息、适时决策和操控飞行的工作负荷越来越大;而且,传统座舱的设计并没有很好地改善飞行安全品质,只不过是改变了飞行员发生错误的方式[2],随着现代战场信息的日趋繁杂,传统座舱对飞行员的辅助能力已到达瓶颈。为此,有必要对传统座舱设计中存在的问题进行深入分析,在现有技术条件基础上,对座舱功能、结构进行重新设计,提升其对飞行员的辅助决策能力。
1传统座舱设计及使用存在问题
1.1工作负荷潜在增加
传统座舱的设计思想是通过引入各种自动化功能辅助飞行员完成任务装订,飞机状态、外部环境状态信息的获取等任务,以减轻飞行员工作负荷。但是,在实际应用过程中,传统座舱只是在飞行员工作量较少的情况下(例如:按航线飞行阶段)起到作用,在态势急剧变化的动态环境中所起的作用非常有限,甚至适得其反[3]。这是由于传统座舱的设计虽然以自动化系统部分代替飞行员操控飞行,但是,飞行员必须监控系统状态,如图1所示。这要求飞行员在出现问题时,能够根据现象找到系统出现问题的原因并恰当处置,而这也潜在地增加了飞行员的负荷。
所以,传统座舱设计并没有有效地减轻飞行员的负担,特别是在复杂态势下,传统座舱只是转移了飞行员的工作负荷,而这也导致了在复杂态势下,飞行员更倾向于手动控制飞机,避免系统进入不当状态。

图1飞行员工作的变化——控制到监督
Fig. 1Pilot’s work changes from controller to supervisor
1.2理论知识要求提高
传统座舱引入各种自动化功能之后,要求飞行员能够熟练掌握各设备的交互方式,能够了解系统的能力与使用限制,能够理解系统的输入/输出关系,在此基础上决定如何操控飞行。文献[4]指出,由于飞行员不能完全掌握系统的工作原理,或多或少的导致使用问题,容易使飞行员陷入模式错误(Mode Error)当中。2013年韩亚空难的主要原因之一即是由于飞行员不完全清楚自动油门的工作原理,误以为自动油门系统会维持安全降落所需的速度,致使飞机降落高度过低、速度过慢,最后撞入防波堤。而且,这一问题随着作战态势的复杂程度加剧会变得更加突出。所以,在实际使用过程中,要求飞行员能够合理地分配精力,从正确的设备上获取正确的信息,然后正确地操控系统。但是,由于外部态势的变化以及飞行员心理承受能力等因素的影响,飞行员很可能会失去对态势及系统的控制能力,进而导致灾难的发生。
1.3辅助决策能力较弱
随着态势评估、目标推理、故障诊断等技术的应用,传统座舱能够利用各种灯光、声音、显示器以不同方式提供各种飞行信息。但是,飞行员在执行任务过程中需要处理各种问题,如图2所示[1]。在恶劣态势下并不能将注意力完全集中于这些信息,况且飞行员需要时间理解信息,然后才能作出决策。特别是当自动化系统正在代替飞行员执行任务过程中出现告警信息时,飞行员需要时间重新掌握态势,使得反应时间变短。此时,飞行员亟需获得与当前任务直接相关的决策信息。所以,传统座舱反馈给飞行员的信息质量不足以很有效地辅助飞行员快速决策。

图2飞行员需要处理的问题[1]
Fig. 2Problem needed to be tackled by pilot[1]
1.4依赖与信任的矛盾[5]
人-人交互与人-机交互的不同点在于,人可以思考,并对其行为负责,所以可以被赋予“责任”,但是机器只能按照预设程序工作。这要求飞行员在使用传统座舱的各种功能时,不能盲目依赖。韩亚空难的另一原因是飞行员盲目依赖自动驾驶系统,当飞行员发现降落出现问题时,没有及时放弃降落,而最终错失成功复飞时机。但是,如果对自动化系统缺乏足够的信任,势必会导致飞行员将注意力更多地分配到监控系统的状态上,潜在地增加了飞行员的工作负荷。所以,传统座舱的设计不能有效地解决依赖与信任之间的矛盾。
2新一代座舱设计需求分析
为了解决上述问题,综合考虑座舱未来的应用环境,其在设计上应满足以下几方面的要求。
2.1智能性与交互性
座舱应具有类似于人的思考能力,能够根据当前任务执行状态,结合外部态势信息进行推理,找到影响目标完成的因素,规划应对方案,解决冲突;能够根据态势调整辅助决策等级,高效地完成飞行辅助决策功能。同时,应具备部分自学习能力。
交互性体现在以下两个方面:
1) 与外界环境的交互
能够感知外部环境,包括天气、地形等因素,能够感知飞机状态,并根据外部环境、飞机状态及任务要求恰当决策。
2) 与飞行员的交互
能够以多种方式提供与任务直接相关的辅助决策信息。为了使飞行员能够充分信任座舱给出的建议,要求座舱人机交互功能要完善,飞行员可以随时查看座舱作出决策的依据,可以选择执行或者不执行,可以选择智能程度;同时,座舱也可以监控飞行员的行为,并可以根据态势适时给出建议,向飞行员汇报当前系统的工作状态及目的。
座舱的智能性是指能够像飞行员一样根据任务要求自动执行各项工作,避免过多模式的设置,有效减轻飞行员的工作负担,避免模式错误的发生。同时,更强大的交互能力使座舱能够提供给飞行员与任务直接相关的辅助决策信息,提高辅助决策能力,缩短飞行员思考的时间,并在一定程度上缓解了依赖与信任的矛盾。
2.2可维护性
座舱在应用过程中会碰到以下几种情况:
1) 机型的多样化
各机型的性能不同,决策约束不同。
2) 任务的多样化
各种任务都有不同的规定,而这充分体现在决策的制定上,例如,在执行攻击任务时,要求优先保证战机安全,但在航母编队防空中,要优先保证航母安全。
3) 武器装备的发展
随着武器装备的发展,如何使用新型装备,使用限制等约束也使得决策规则需要更改。
4) 战术的变更
战术是由人制定的,随着专家对战场规律研究的深入,战术也是在不断变化的。
5) 不同的飞行员
每个飞行员都有自己的操作习惯,智能座舱不仅要能监控飞行员的行为,还应能够适应不同飞行员的操控习惯,在此基础上提供辅助决策功能。
总之,基于以上这些原因,座舱应具有良好的可维护性,例如具有删除/更改/扩展决策功能。
2.3可集成性
传统座舱引入了多种自动化系统,完成不同的功能,新一代座舱的设计应能够充分利用这些功能,信息能够在不同功能模块间进行交互。而且,随着设备的不断更新,应融合更多的功能模块。
3智能座舱总体结构设计及其功能
智能座舱除了可以提供传统的功能,例如给出航行诸元、任务信息之外,它还应该具有决策支持功能,决策过程中设计的知识类型复杂多变,而且实时处理要求很高,必须在规定的时间内做出相应的处理结果。否则,处理的结果将毫无意义。智能座舱不仅要具有定性的知识推理能力,而且具有定量的计算功能,并能将两种功能有机地结合起来。显然,这比一般专家系统的功能强。另外,专家系统的知识结构通常比较单一,限定于用规则或因果关系等形式表示某方面的专业知识。而智能座舱的知识则更为广泛,例如增加了与领域知识库相应的“特定决策知识”,与模型库和方法库相应的模型和方法知识,以及来自数据库的数据模式中所需的知识。因此,智能座舱的知识摄取和表达更为困难和繁琐。再者,智能座舱的推理机制不仅具有对不同结构特点的知识的推理,而且要与定量计算结果综合起来以加强辅助决策的有效性,这就使得它的推理比一般专家系统的推理更加复杂。以上这些特点也都要求智能座舱需要着力于总体结构优化、融合多种功能,从而实现整体能力的提升。
3.1智能座舱的总体结构设计
飞行员、载机、外部环境是影响任务执行的三个要素。飞行员通过各种传感器获取外部环境及载机状态信息,围绕任务这一核心展开行动。当前学者针对上述3个要素、一个核心进行的关键技术研究主要集中在以下几个方面:
1) 针对外部环境设计的态势评估技术、威胁评估技术、信息融合技术。
2) 针对载机设计的故障诊断技术、自动控制技术。
3) 针对飞行员设计的行为监控技术、行为评估技术、人机交互技术。
4) 针对任务目标设计的航路规划技术、任务建模技术、辅助决策技术。
为了能够以任务为核心,有效融合上述技术,本文将座舱总体结构按照图3所示设计为三层。第一层是对飞行员、飞机、环境状态的感知层;第二层是将感知到的信息,结合任务信息进行分析的解释层;第三层是综合考量任务、目标及态势信息的任务规划层。

图3智能座舱结构及数据流图
Fig. 3Structure and dataflow of intelligent cockpit
3.2各系统结构及其功能
座舱主要由外部环境监控系统、载机状态监控系统、飞行员状态监控系统、态势诊断系统、人机接口系统、任务规划系统组成。下面详细介绍各系统内部结构及其功能。
1) 载机状态监控系统(Airplane Status Monitoring System, ASMS)
用于监控飞机的状态,包括飞行高度、速度、飞行姿态以及飞机故障与否、故障程度等信息。
2) 外部环境监控系统(Environment Monitoring System, EMS)
用于获取外界环境信息,包括影响任务执行的天气、地形、敌我态势等因素。例如,当飞机做超低空飞行时,需要对可能存在的危险地形进行探测和评估。
3) 飞行员状态监控系统(Pilot Status Monitoring System, PSMS)
通过传感器获取飞行员的行为数据及状态信息(例如,综合负载、视觉负载、听觉负载、体感负载、机动负载、执行力负载、时间压力、精神压力、警觉程度等),判断飞行员工作负荷是否超量;参考外部环境、载机状态以及当前任务数据,判断飞行员意图。飞行员状态监控系统结构如图4所示。
4) 态势诊断系统(Situation Diagnosis System, SDS)

图4飞行员状态监控系统结构
Fig. 4Architecture of pilot status monitoring system
通过接收环境数据、载机状态数据、飞行员状态数据,按照任务数据要求,综合考虑飞行安全、战斗生存、任务完成3个要素,找到与当前任务要求存在的偏差,对这些偏差数据重点监控,并将偏差数据传送至人机接口系统显示以及任务规划系统,用于对当前任务重新规划。同时,在当前飞行员意图下,进行战场推演,将推演结果发送至人机接口系统,供飞行员参考。态势诊断系统结构如图5所示。

图5态势诊断系统结构
Fig. 5Architecture of situation diagnosis system
5) 人机接口系统(Human Machine Interface System, HMIS)
在传统设计基础上,引入人工智能方法,重点提升了座舱的辅助决策能力,以降低飞行员工作负荷。人机接口系统(见图6)应具有以下基本功能:
① 显示管理
由于过多的数据显示,会降低飞行员对当前执行任务所需的关键信息的把握,而过少数据,又不足以辅助飞行员把握当前态势。人机接口分系统应根据当前任务和态势,配置显示画面及信息。
同时,不同飞行员存在操作习惯差异,在实际飞行时,不可能完全按照任务数据进行飞行,对较小偏差持续提示也容易影响飞行员的注意力分配,所以人机接口系统应能够综合任务偏差数据以及飞行员历史操作数据,智能地将相关信息提供给飞行员。
② 自适应辅助决策
人机接口系统另一重要功能是根据飞行员的状态及任务信息,自动调整座舱的辅助等级,从而有效地减小操作次数。

图6人机接口系统结构
Fig. 6Architecture of human-machine interface system
6) 任务规划系统(Mission Planning System, MPS)
任务规划系统(见图7)由规划控制器、战术数据库和任务规划数据库等组成,能够完成路径规划、有效载荷规划、方案评估及选择等功能。其中,战术数据库包含了防御计划、应对导弹计划、应对敌机计划、应对地对空导弹阵地计划以及逃逸、规避、攻击、探测等具体的行动选择。任务数据库包含了本次执行任务的所有数据及要求。同时,任务规划系统能够向飞行员提供任务执行的更大灵活性,它包括威胁回避、燃油管理等功能,能根据飞机的限制条件和状态,优化燃油量和减少被敌方火力击中的危险。在给定新的约束条件下,重新确定飞行航线,向飞行员提供可选用的替换任务计划。它能够监控任务的执行情况,并将之与装订的任务模型以及态势诊断结果作比较,评价新数据的影响,帮助飞行员理解创建的任务方案,将任务方案按优先级排队。

图7任务规划系统结构
Fig. 7Architecture of mission planning system
4智能座舱的辅助等级设计
如同过多的信息可能导致飞行员负荷过大一样,过度地提供辅助决策能力同样会使飞行员感到厌烦,所以,需要对智能座舱辅助决策等级进行设计。
国外已有学者对人与智能体之间的交互程度进行了划分[6-7],其中概括较为全面的是文献[6]对人与自动化系统交互程度10级划分重新进行修订,如表1所示。但是由于飞行员执行任务过程中面临的压力巨大,10级划分明显较为繁琐,容易分散飞行员注意力。按照“人在回路”的要求,对智能座舱辅助决策等级划分为如下4级:
1) 受控状态
飞行员直接分配任务给智能座舱,此时系统机械地执行分配任务,状态与传统自动化系统相似,飞行员可以随时查看系统执行任务的状态。
表1人与自动化系统交互程度
Table 1Interaction degree between human and automation
system

2) 待命状态
飞行员在需要帮助时,选择该模式,智能座舱根据当前任务要求以及外部态势给出建议。
3) 顾问状态
智能座舱根据当前态势,直接给出建议,飞行员可以选择执行或取消行动。
4) 接管状态
智能座舱自动推理任务及目标,制定决策并执行,同时给飞行员汇报相应情况。为了保证“人在回路”的要求,飞行员可以随时打断任务进程,重新获取控制权。该模式下,智能座舱的智能性充分得到体现。
下面以如图8所示战术轰炸任务为例讲解辅助等级4级划分的应用。
战术轰炸任务的执行过程如下:①起飞爬升;②按航线飞行;③战术飞行,警戒走廊下降高度、低空飞行、投弹、低空飞行、警戒走廊爬升;④按航线飞行;⑤进近。
按航线飞行阶段飞行员的主要工作是监控飞机的状态(各仪表的参数)、利用各种导航设备进行综合导航、经过转弯点时注意飞行动作的协调、同时根据天气情况作出相应决策。该阶段外部态势变化较小,飞行员可以将智能座舱设置为受控状态;当飞机出现故障或者发现出现敌截击机等态势变化情况,飞行员可以选择待命状态,智能座舱根据态势信息结合任务要求给出建议。
起飞爬升以及进近阶段,飞行员不仅需要监控飞机状态,注意飞行高度、速度、航向、风速、风向、上升/下降率等信息,而且还需要收听塔台指挥、观察无线电指示、对外部环境进行观察;在下降过程中,如果出现飞机速度过大、无法看清跑道等情况,还需要准备复飞。所以,该阶段飞行员的负荷显著提升,如果此时辅助等级设置为顾问状态,飞机在进入起飞爬升或者进近阶段之后将自动根据当前态势,直接给出建议。
战术飞行阶段,飞行员的主要精力将转移到监控外部态势变化的工作上。此阶段需要进行低空,甚至超低空飞行,地表环境、气象条件变化剧烈,飞行员精力消耗大,容易产生疲劳,一旦飞机出现机械故障等其他问题,飞行员难以及时处置,如果此时智能座舱的辅助等级设置为接管状态,智能座舱将代替飞行员作出相应决策并执行,并汇报给飞行员。

图8战术轰炸任务过程
Fig. 8Mission process of tactical bomb mission
5智能座舱与飞行员的关系
传统座舱与飞行员的关系如图9所示,飞行员对各个功能模块进行操作,使各个模块按照设计的功能运行。
当智能座舱具有任务规划能力之后,座舱则具有类似于人的思考的能力,而且,同样具有分配任务的权力,此时智能座舱相当于一个电子飞行辅助人员,如图10所示。
这时,飞行员可以按需设定智能座舱的辅助决策等级,与智能座舱进行交互,可以查询智能座舱作出决策的依据,从而使飞行员能够判断出智能座舱给出建议的正确性,由于这种充分的交互性,智能座舱与飞行员之间的关系也随之发生变化。传统自动化系统的设计思想是替代飞行员的工作,它与飞行员之间的关系是监督式的关系,而当引入“智能”之后,由于其具有类似于人的推理能力,能对外界环境作出反应,在必要的时候辅助飞行员完成任务,从而将自身的角色转变为“飞行辅助人员”,实现人机关系的质的飞跃,如图11所示。

图9传统座舱与飞行员的关系
Fig. 9Relationship between traditional cockpit and pilot

图10智能座舱与飞行员的关系
Fig. 10Relationship between intelligent cockpit and pilot
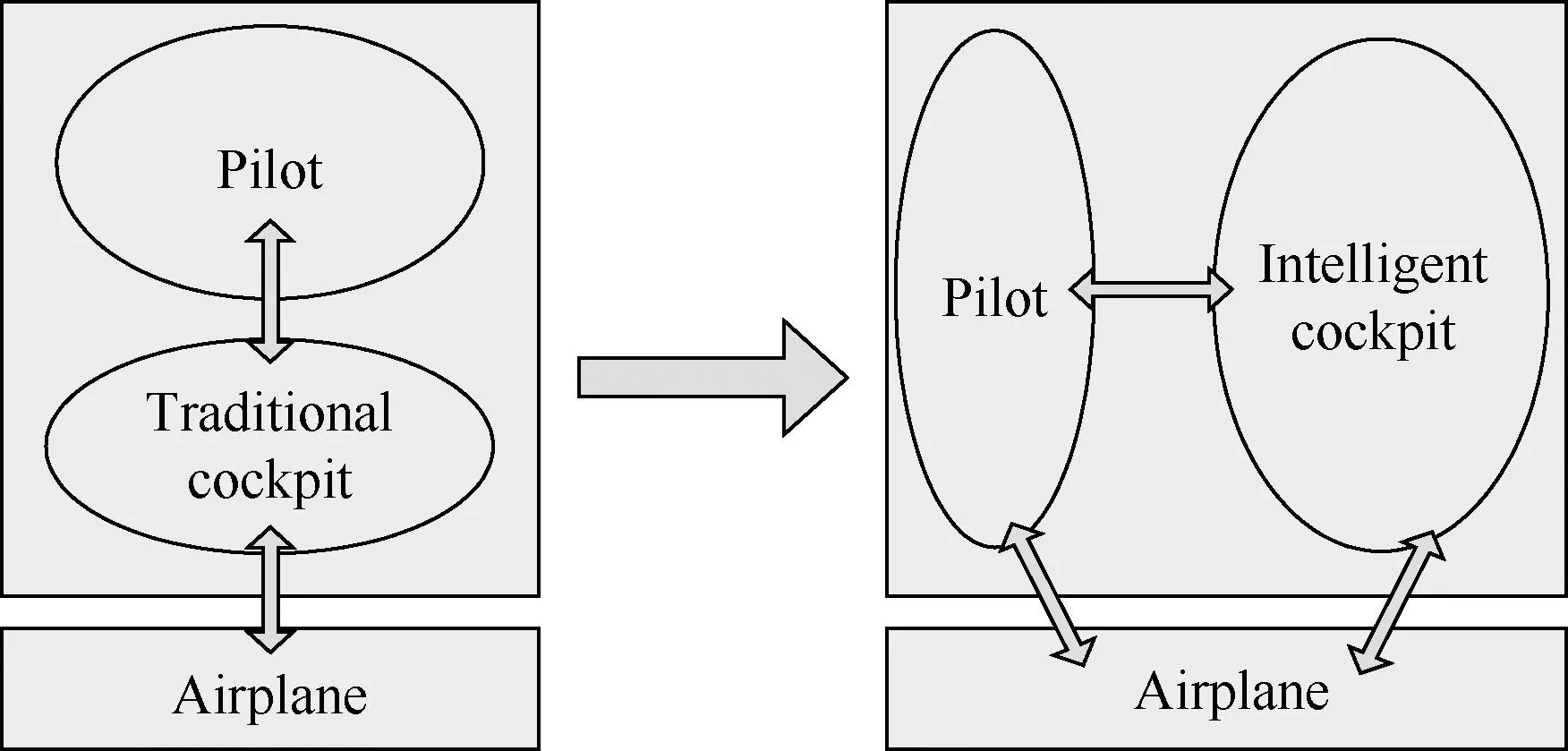
图11监督到协作的关系转变
Fig. 11Relationship from supervision to collaboration
6中国当前研究的不足与建议
首先,中国在航路规划[8-9]、态势评估[10-12]、故障诊断[13-15]等方面研究成果丰富,在充分考虑到实时性情况下,可以直接运用到智能座舱各系统的设计当中。但是,国内很少有学者将这些技术作为一个整体进行研究,而且,战术决策的制定过程不是一种算法或者模型就能解决的,不同任务的侧重点也不同,当前国内极少有学者对飞行任务的执行过程进行建模,从而无法实现任务状态的监控功能,也就不能实现顶层任务的规划,从而导致态势诊断、威胁评估、故障诊断等方面的研究不能在工程实现中综合运用。所以,今后的工作将重点放在飞行任务的建模上,当前流行的任务建模方法有5种,需要结合飞行任务的特点甄别选用:①活动网络[16];②状态图和活动图[17];③事件驱动的过程链模型[18];④数据流程图[19];⑤Petri网[20]。
其次,美英等国开展智能座舱研究的时代较早,所以使用的相关技术较为落后,较为明显的不足是智能座舱不具备学习的能力。随着人工智能技术的发展,文献[21]在总结了相关研究不足的情况下,为了弥补智能设计只能应用于设计好的领域的限制,于20世纪90年代开展了认知结构的研究[22]。旨在开发一种通用的架构[23],通过合理的设计,使开发的系统具有与人相同的认知能力,实现人级智能体(Human-level agents)[24]。在随后20多年的研究中,先后涌现出诸如SOAR[24]、ACT-R[25]、EPIC[26]、Clarion[27]、SAL[28]、Icarus[29]等认知结构。在这些众多认知结构中,SOAR的应用最为广泛。美国DARPA和大西洋司令部联合资助的战争综合演练场STOW(Synthetic Threat of War)项目当中即使用了基于SOAR-Agent的智能兵力(Soar-intelligent forces)模拟固定翼及旋翼飞行兵力完成侦察、战斗等任务,并能与真实飞行员操控的仿真兵力进行模拟较量。文献[30]使用SOAR模拟固定翼战斗机完成包括起飞、着陆、搜索、救援、截击、对地攻击等任务,并于仿真环境中验证了其有效性。文献[31]将其应用于机器人的控制系统,由于SOAR开发出的Agent能够充分与外界环境进行交互,从而能够实现在未知环境下控制机器人的目的,该文献设计的机器人实现了室内搜索、室外导航功能。文献[32]将SOAR与传统控制技术结合应用于无人机的任务管理系统,使无人机能够根据动态变化的外部环境和自身的状态调整任务,最后在仿真环境中验证了该方法的可行性。从上述文献的研究成果可以看出,认知结构技术的成熟程度较高,可用性较强,能够移植到智能座舱的设计当中。
最后,应强化飞行员行为及其特点的研究。不同飞行员有不同的操控特点。例如,在按航线飞行阶段出现航迹偏离时,过转弯点共有如图12所示的3种方式:①修正航迹到原航线,再向转弯点飞行;②直接向转弯点飞行;③退出原航线加入下一条航线。
不同的飞行员在面对相同环境时可能会选择不同的飞行方式,所以,智能座舱应该能够在综合考虑飞行手册、飞行任务的标准数据、飞行员行为特点、推理出的飞行员意图基础上给出辅助决策信息。

图12飞行员的备选方案
Fig. 12Alternative plans of pilot
7结论
1) 讨论了传统座舱设计及其在使用过程中存在的问题,并分析了智能座舱的设计需求。
2) 设计了智能座舱的总体结构及其辅助决策等级。
3) 探讨了智能座舱与飞行员之间关系的转变。
4) 分析了当前研究的不足之处,指明了今后研究的重点。
参考文献
[1]苏建民. 飞机座舱设计人机交互技术研究[D]. 西安: 西北工业大学, 2002: 1-2.
SU J M. Research of cockpit and man-machine interactive interface[D]. Xi’an: Northwestern Polytechnical University, 2002: 1-2 (in Chinese).
[2]YANNONE R M. The role of expert systems in the advanced tactical fighter of the 1990’s[C]//Proceedings of the 1985 National Aerospace and Electronics Conference, 1985: 12-16.
[3]WIENER E L. Human factors of advanced technology(“Glass Cockpit”) transport aircraft: NASA Contractor Report 177[R]. Washington, D.C.: NASA, 1989.
[4]SARTER N B, WOODS D D. Pilot interaction with cockpit automation II: An experimental study of plots’ model and awareness of the flight management and guidance system[J]. International Journal of Aviation Psychology, 1994, 4(1): 1-28.
[5]SARTER N B, WOODS D D, BILLINGS C E. Automation surprises[J]. Handbook of Human Factors and Ergonomics 2, 1997, 2(1): 1926-1943.
[6]PARASURAMAN R, SHERIDAN T B, WICKENS C D. A model for type sand levels of human interaction with automation[J]. IEEE Transactions on Systems, Man and Cybernetics, 2000, 30(3): 286-297.
[7]TAYLOR R M. Cognitive cockpit systems engineering: pilot authorization and control of tasks[C]//The 8th Conference on Cognitive Science Approaches to Process Control, 2001: 1-10.
[8]符小卫, 李金亮, 高晓光. 威胁联网下无人作战飞机突防作战航迹规划[J]. 航空学报, 2014, 35(4): 1042-1052.
FU X W, LI J L, GAO X G. Defense penetration path planning for UCAV based on threat netting[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(4): 1042-1052 (in Chinese).
[9]马冠军, 段海滨, 刘森琪, 等. 基于MAX-MIN自适应蚁群优化的无人作战飞机航路规划[J]. 航空学报, 2008, 29(增刊): S243-S248.
MA G J, DUAN H B, LIU S Q, et al. UCAV path planning based on MAX-MIN self-adaptive ant colony optimization[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(Sup.): S243-S248 (in Chinese).
[10]段海滨, 丁全心, 常俊杰, 等. 基于并行蚁群优化的多UCAV任务分配仿真平台[J]. 航空学报, 2008, 29(增刊): S192-S197.
DUAN H B, DING Q X, CHANG J J. Multi-UCAVs task assignment simulation platform based on parallel ant colony optimization[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29 (Sup.): S192-S197(in Chinese).
[11]王玉惠, 韩占朋, 陈哨东, 等. 防空态势评估系统分析及新型评估模型研究[J]. 南京航空航天大学学报, 2014, 46(4): 558-566.
WANG Y H, HAN Z P, CHEN S D, et al. Analysis and modeling of threat evaluation system in air defense operations[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2014, 46(4): 558-566 (in Chinese).
[12]马延豪, 张耀中, 张莹. 基于影响网络的态势估计[J]. 火力与指挥控制, 2014, 39(6): 90-93.
MA Y H, ZHANG Y Z, ZHANG Y. Situation assessment based on influence net[J]. Fire Control & Command Control, 2014, 39(6): 90-93 (in Chinese).
[13]肖冰, 胡庆雷, 霍星, 等. 执行器故障的挠性航天器姿态滑模容错控制[J]. 航空学报, 2011, 32(10): 1869-1878.
XIAO B, HU Q L, HUO X, et al. Sliding mode fault tolerant attitude control for flexible spacecraft under actuator fault[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(10): 1869-1878 (in Chinese).
[14]李业波, 李秋红, 黄向华, 等. 航空发动机气路部件故障融合诊断方法研究[J]. 航空学报, 2014, 35(6): 1612-1622.
LI Y B, LI Q H, HUANG X H, et al. Research on gas fault fusion diagnosis of aero-engine component[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(6): 1612-1622 (in Chinese).
[15]熊智, 邵慧, 华冰, 等. 改进故障隔离的容错联邦滤波[J]. 航空学报, 2015, 36(3): 929-938.
XIONG Z, SHAO H, HUA B, et al. An improved fault tolerant federated filter with fault isolation[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(3): 929-938 (in Chinese).
[16]SANDERS W H, MEYER J F. Reduced base model construction methods for stochastic activity networks[J]. Selected Areas in Communications, 1991, 9(1): 25-36.
[17]BOOCH G, DOUGLASS B, CERNOSEK G. Unified modeling language for real-time systems design[M]. 1996: 1-10.
[18]AALST W M P. Formalization and verification of event-driven process chains[J]. Information and Software Technology, 1999, 41(10): 639-650.
[19]STEVENS W, MYERS. G, CONSTANTINE L. Structured dsign[J]. IBM Systems Journal, 1974, 13(2): 115-139.
[20]PETERSON J L. Petri nets theory and the modeling of sytems[M]. 1981: 1-21.
[21]KELLEY T D, LONG L N. Deep blue cannot play checkers: the need for generalized intelligence for mobile robots[J]. Journal of Robotics, 2010, 2010: 1-8.
[22]NEWELL A. Soar: a cognitive architecture in perspective[M]. 1990: 1-15.
[23]ERNST G, NEWELL A. GPS: a case study in generality and problem solving[M]. 1969: 1-21.
[24]LANGLEY P, LAIRD J E, ROGERS S. Cognitive architectures: Research issues and challenges[J]. Cognitive Systems Research, 2009, 10(2): 141-160.
[25]ANDERSON J R, LEBIERE C. The atomic components of thought[M]. 1998: 1-25.
[26]MEYER D E, KIERAS D E. A computational theory of executive cognitive processes and multiple-task performance: part 1. Basic mechanisms[J]. Psychological Review, 1997: 104(1): 3-65.
[27]SUN R. The CLARION cognitive architecture: extending cognitive modeling to social simulation[M]. 2006: 1-22.
[28]JILK D J, LEBIERE C, O’REILLY R C, et al. SAL: an explicitly pluralistic cognitive architecture[J]. Journal of Experimental & Theoretical Artificial Intelligence, 2008, 20(3): 197-218.
[29]LANGLEY P, MCKUSICK K, ALLEN J. A design for the Icarus architecture[J]. SIGART Bulletin, 1991: 2, 104-109.
[30]JONES R M, LAIRD J E, NIELSEN P E, et al. Automated intelligent pilots for combat flight simulation[J]. AI Magazine, 1999, 20(1): 27.
[31]HANFORD S D, JANRATHITIKARN O, LONG L N. Control of mobile robots using the soar cognitive architecture[J]. Journal of Aerospace Computing, Information, and Communication, 2009, 6(2): 69-91.
[32]GINETTI P, DODD T, THOMPSON H. Simulation of a soar-based autonomous mission management system for unmanned aircraft[J]. Journal of Aerospace Information Systems, 2013, 10(2): 53-70.
吴文海男, 博士, 教授, 博士生导师。主要研究方向: 精确制导与飞行控制。
Tel.: 0532-51833632
E-mail: 109889354@qq.com
Received: 2015-05-11; Revised: 2015-06-24; Accepted: 2015-08-11; Published online: 2015-09-3011:50
URL: www.cnki.net/kcms/detail/11.1929.V.20150930.1150.018.html
Overall architecture design of new generation intelligent cockpit
WU Wenhai1, *, ZHANG Yuanyuan1, 2, LIU Jintao1, ZHOU Siyu1, MEI Dan1
1. Qingdao Branch, Naval Aeronautical Engineering Institute, Qingdao266041, China 2. Navy Flight Academy, Huludao125000, China
Abstract:Traditional cockpit assists pilot to complete missions and reduce their burden by introducing a variety of automated functions. With the increasingly severe changes of battlefield situation, the ability of traditional cockpit to assist pilot reaches the bottleneck and gives rise to the research of new design of overall architecture to improve assisting decision ability. The problem of traditional cockpit is analyzed, the cockpit adapted to the new fighter is discussed and its overall architecture and decision support grades are designed centered on the mission by integrating many technologies under research such as situation assessment and fault diagnosis. The internal structure and functions of each system are designed and the changing relationship between pilot and cockpit is discussed. Finally, the current shortage of research is pointed out to show the key work of future study.
Key words:intelligent cockpit; decision support; overall architecture; navigation aiding; design requirement
*Corresponding author. Tel.: 0532-51833632 E-mail:109889354@qq.com
作者简介:
中图分类号:V223.1
文献标识码:A
文章编号:1000-6893(2016)01-0290-10
DOI:10.7527/S1000-6893.2015.0231
*通讯作者.Tel.: 0532-51833632E-mail: 109889354@qq.com
收稿日期:2015-05-11; 退修日期: 2015-06-24; 录用日期: 2015-08-11; 网络出版时间: 2015-09-3011:50
网络出版地址: www.cnki.net/kcms/detail/11.1929.V.20150930.1150.018.html
引用格式: 吴文海, 张源原, 刘锦涛, 等. 新一代智能座舱总体结构设计[J]. 航空学报, 2016, 37(1): 290-299. WU W H, ZHANG Y Y, LIU J T, et al. Overall architecture design of new generation intelligent cockpit[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(1): 290-299.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn