旋翼固定翼复合式垂直起降飞行器概念设计研究
2016-05-05 07:03张啸迟万志强章异嬴杨超
航空学报 2016年1期
张啸迟, 万志强, 章异嬴, 杨超
北京航空航天大学 航空科学与工程学院, 北京 100083
旋翼固定翼复合式垂直起降飞行器概念设计研究
张啸迟, 万志强, 章异嬴, 杨超*
北京航空航天大学 航空科学与工程学院, 北京100083
摘要:近些年来垂直起降(VTOL)飞行器发展迅速,并获得了一些突破性进展,但仍有许多尚未解决的问题。结合旋翼机和固定翼飞机的优点,提出一种旋翼固定翼复合式飞行器布局方案,兼具优异的垂直起降性能及高速飞行能力,具有转换过渡稳定平滑、可控性强的特点。在该旋翼固定翼复合式布局中,特型旋翼可旋转以提供垂直升力,也可停转、锁定与固定式机翼保持平行,最终转换为固定翼面使得飞机转换为固定翼布局,并在机翼上布置矢量推力装置,实现高速飞行。概念设计研究围绕设计方法、特型旋翼、矢量推力系统等关键技术展开,并开展了平飞模式飞行特性、垂直起降模式飞行特性、航程、航时以及飞行操纵等性能的分析。通过试制小型原理验证机,并对各飞行状态及转换过渡飞行进行飞行试验,验证了该布局的可行性。结合实际算例展开分析计算,验证了该方案设计方法的准确性和实用性。
关键词:垂直起降飞行器; 旋翼; 复合式飞行器; 概念设计; 性能分析
垂直起降(VTOL)飞行器是近年来发展迅速的一类新型航空器,同时具备直升机的垂直起降能力,与固定翼飞机的高速平飞能力,具有较好的经济和军事价值[1]。
垂直起降飞行器随着科学技术的发展,很多新的布局形式不断涌现并投入使用。复合式直升机、倾转旋翼飞机和旋转机翼飞机是垂直起降飞行器中的典型代表,近年来获得了很多突破性进展,但仍有尚未解决的问题[2-3]。
复合式直升机在常规直升机的基础上布置推进系统和机翼,为旋翼卸载使得水平飞行速度有所提升。以欧洲X3高速直升机为例,优点是保留直升机优异的垂直起降和低速性能;缺点是高速飞行时旋翼的前进比远高于常规直升机,旋翼后行桨叶大部分处于反流区内,气流分离现象更严重,前行桨叶的压缩效应更突出,偏流作用显著[4-6]。
倾转旋翼飞机的旋翼动力系统推力线方向可倾转,在升力和推力间转换。以美国V-22“鱼鹰”运输机为例,其打开了垂直起降飞行器实际应用的局面。随着技术发展,长期困扰的动力稳定性、气动力干扰、飞行操纵等问题均逐渐走向成熟。优点是对旋翼滑流遮蔽较小,压差阻力损失较小;缺点是倾转机构复杂,控制困难,旋翼桨盘载荷较大,悬停效率较低。
旋转机翼飞行器是一种新概念飞行器,其机翼可旋转同时作为旋翼和机翼。其优点是水平飞行模式下旋翼停转,改为由其他方式提供推力,飞行速度高。其代表为美国研制的X-50无人飞行器技术验证机。该验证机方案为避免旋翼的反扭作用,采用喷气旋翼技术,喷气来源于涡扇发动机,一个分流阀被用来引导排气从旋翼梢部喷口喷出以进行旋翼模式飞行,或从后部巡航喷口喷出以进行固定翼模式巡航飞行;鸭翼和水平尾翼后缘都有增升襟翼装置,且都与机身铰接,可以进行一定角度的偏转;机身尾部设置有方向控制喷口,用于在飞机以直升机模式飞行时进行偏航控制。文献[7]对CRW飞行器(Canard Rotor/Wing Aircraft)飞行性能进行了研究,指出该方案综合性能优于其他垂直起降飞行器方案,并将其与直升机、倾转旋翼机和“鹞”式战斗机进行对比。结果表明相较于倾转旋翼机和高速直升机,该方案具有更宽的飞行包线,仅在垂直起降状态下做低速飞行时垂直飞行性能略逊于直升机;相比于使用矢量喷口技术的“鹞”式战斗机,该方案在飞行速度方面略逊一筹,但拥有更加优异的垂直起降和低速飞行性能。
垂直起降飞行器的出现和发展影响了军用、民用航空器发展方向,越来越多的国家开始重点关注此类飞行器的研制工作,受到关注的主要性能指标如下:
1) 巡航速度和任务航程;
2) 悬停效率和垂直起降性能;
3) 水平飞行升阻比;
4) 有效载荷系数。
对以上各种垂直起降飞行器的特点和原理进行分析和对比,可以得出如下观点:借鉴现有方案关键技术,提出先进的总体布局方案,是研制高性能垂直起降飞行器的关键。
本文综合旋翼机和固定翼飞机的优点,以垂直起降能力为目标,同时兼有较高的平飞升阻比,提出一种旋翼固定翼复合式飞行器布局方案,兼具优异的垂直起降性能及高速飞行能力,具有转换过渡稳定、可控性强的特点。
1总体方案概述
1.1气动布局方案
本文提出的旋翼固定翼复合式垂直起降飞行器布局方案为固定翼与旋翼复合构型。在机体上方布置特型旋翼,机体中部布置固定式机翼(后文简称为机翼)及舵面,并在机翼上布置矢量推力装置,由中央动力系统经传动系统分配动力,机身尾部布置尾翼及舵面(见图1)。

图1旋翼固定翼复合式垂直起降(VTOL)飞行器概念方案三视图
Fig. 1Three view of rotary wing and fixed wing compound vertical takeoff and landing (VTOL) aircraft conceptual configuration
1.2重心位置设计
旋翼、机翼和尾翼与重心的相对位置对全机在各个飞行状态下的纵向特性有直接影响,是关乎飞行品质的重要因素。
悬停飞行和低速飞行中,旋翼为主要升力和控制部件,研究表明前飞状态时旋翼对速度的静稳定性较好而对迎角的静稳定性较差,机体重心位于旋翼之前的设计将有利于提高其对迎角的静稳定度。高速平飞状态下,固定翼面为主要气动部件,与重心的相对位置决定了纵向和横向的稳定裕度。由此,旋翼的前重心设计和平飞模式的操稳特性设计将确定全机的重心位置。
1.3飞行机理分析
现代航空领域的工程实际应用要求垂直起降飞行器兼顾垂直起降和长航时大航程的性能,并追求较大任务载荷时的经济性。该复合式飞行器具有两种飞行模式,即垂直起降模式和平飞模式,并且可以在空中实现两种模式的转换过渡。垂直起降模式时,特型旋翼旋转提供垂直升力,周期变距运动提供机体俯仰及滚转力矩;矢量推力装置的推力大小和方向可分别控制,两侧的推力差平衡旋翼的反扭矩,矢量控制则提供机体滚转力矩。平飞模式时,矢量推力装置提供水平推力,固定式机翼提供主要升力,特型旋翼停转并锁定与固定式机翼平行转变为固定翼面,整机变为固定翼构型,由推力矢量和舵面偏转提供控制力矩,从而实现高速远距离平飞。
由垂直起降模式转换为平飞模式时,矢量推力装置的推力增大,使飞行器水平加速飞行,固定式机翼逐渐承载的同时,特型旋翼经减速、停转并锁定过程逐渐卸载,转变为固定翼面,与固定式机翼保持平行,全机转变为类双翼布局的固定翼构型。由平飞模式转换为垂直起降模式时,矢量推力系统推力减小,飞行器做减速飞行,随后启动特型旋翼加速旋转,逐渐增大旋翼总距以承载,同时机翼卸载,变回垂直起降模式做低速或垂直飞行。其转化过渡过程中的升力变化如图2所示。

图2转换过渡过程中旋翼与机翼的升力变化
Fig. 2Changes of lift by rotary wing and fixed wing
during conversion
该复合式飞行器的典型飞行剖面如图3所示,包括
1) 垂直起飞;
2) 过渡转换;
3) 水平巡航;
4) 盘旋作业;
5) 返航和降落。
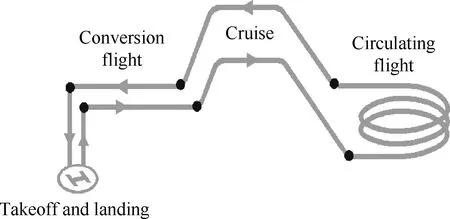
图3典型飞行剖面
Fig. 3Typical flight profile
1.4技术优势
本文方案在高速飞行性能实现方面采用旋翼停转锁定变为固定翼面的思路,与CRW飞行器具有相似的布局形式。这样的构型特点使得高速飞行时升阻特性和动力系统的推进效率将高于高速直升机和倾转旋翼机,具有更宽的飞行包线,同时升力和水平推力控制解耦,可实现平稳的过渡转换飞行。
选用大直径的旋翼可获得较低的桨盘载荷和较高的悬停效率,以达到较大的悬停升限和垂直飞行性能。而倾转旋翼机考虑要将其旋翼作为水平飞行的推进螺旋桨,其桨盘面积较小,相比本文方案有着较高的桨盘载荷,使得其对起降场地有着更高的要求。
相比于“鹞”式和美国联合攻击战斗机(JSF)等具有垂直起降能力的固定翼飞行器,本文方案在高速性能方面有明显差距,但低速性能远高于前者。并且,本文方案悬停效率较高,对动力系统的要求和垂直起降飞行的油耗较低。而且前者矢量喷口产生的高温喷流对起降场地如停机坪和舰船甲板有很高要求。
再相比于常规直升机在高速前飞状态时,前行桨叶出现激波效应而后行桨叶反流区范围扩大是限制其最大飞行速度的根本原因。本文方案的过渡转换飞行中旋翼转速降低最终停转锁定变为固定翼面,规避旋翼旋转导致的速度限制,使得高速飞行得以实现。
该方案核心技术由现有成熟的直升机技术和固定翼飞行器技术整合并发展,可行性强,并随着相关关键技术的发展与突破,综合性能将进一步改善。
2总体参数设计与关键技术方案
本文方案总体设计主要内容是确定固定翼面和特型旋翼参数以及动力系统选型,设计要求是满足初始条件对低速和垂直起降性能以及平飞性能的要求,并实现转换过渡稳定平滑、可控性强。该方案通过以旋翼锁定变为固定翼面为核心思想,兼具垂直起降能力的同时规避常规旋翼飞行器因旋翼旋转而导致平飞气动力不对称的问题。所以,该方案的设计研究重点为旋翼与机翼的干扰分析、特型旋翼技术、动力传动系统设计以及飞行动力学分析与飞行操纵技术。
2.1总体布局设计概述
该方案的总体布局为旋翼固定翼复合布局,其中固定翼选用单翼布局,旋翼选用单旋翼布局,分别在平飞模式和垂直起降模式提供主要升力。故旋翼沿机身纵轴布置于重心位置,位于机翼上方。为减少结构质量,尾翼选取V型尾翼布局,布置于旋翼滑流之外。两个矢量推力装置布置于机翼后缘,综合考虑结构设计和滑流干扰的影响,推进装置沿展向布置于旋翼滑流影响区域外。旋翼和矢量推力系统由一套动力装置驱动,通过传动系统分配功率。
综上所述,结合给定的技术要求,可展开飞行器总体参数设计、气动设计、动力选型、结构设计和控制系统设计等。
2.2固定翼面设计概述
2.2.1固定翼面总体参数设计
固定翼面主要包括固定式机翼和尾翼。机翼是平飞模式下产生升力的主要部件。同时为矢量推力系统提供结构支撑。在结构布置方面,由于动力传动系统布置于机翼内部,需综合传动机构进行设计,机翼厚度需满足传动机构布置空间要求,如图4所示。

图4传动系统布局
Fig. 4Transmission system layout
在气动方面,根据总体参数选定的翼载荷、翼面积等参数,结合平飞模式下的性能要求和垂直起降模式下旋翼的干扰情况,选择翼型和设计展弦比、根梢比和后掠角等,并进行气动特性估算[8-9]。
转换过渡飞行中机翼受到旋翼尾迹的影响。文献[10]指出,机翼承载情况和旋翼干扰引起的诱导速度有关,初步分析机翼气动力可将机翼在滑流区的气流速度简化等效为旋翼在机翼处的诱导速度和无穷远处来流的线性叠加:
Vwing=V∞+kVi
(1)
式中:Vwing为来流速度向量;V∞为无穷远处来流速度向量;Vi为旋翼引起机翼处的诱导速度向量;k为旋翼的下洗因子。
由此简化等效将机翼按流动分为自由流区和滑流区(见图5),进一步估算机翼的气动力和气动力矩。

图5旋翼滑流对机翼干扰情况
Fig. 5Interference by rotary wing downwash with
fixed wing
对于尾翼的总体参数设计工作,可作如下考量:在垂直起降模式下,尾翼的作用较小;在平飞模式下,尾翼作用原理与常规固定翼飞机相同,即保证飞机的安定性和操纵性,故主要根据平飞模式的飞行需求进行设计。最后结合整机的气动参数对气动性能、配平和控制等进行分析[11]。
2.2.2机翼与旋翼气动干扰问题
由于旋翼和机翼距离较近,其导致的气动干扰现象将对各个飞行状态都有显著的影响,存在特殊的气动力特性、结构响应等问题,详细设计工作中有必要进一步深入探究。
近年来随着复合式直升机和倾转旋翼机技术高速发展,多种旋翼与机翼气动干扰的分析方法被提出,如文献[12-16]等。本文方案在垂直起降飞行和过渡转换飞行状态的气动干扰情况与上述两种飞行器的悬停和前飞状态相似,可采用相同的分析方法。
垂直起降模式下,机翼与旋翼发生显著气动干扰现象:机翼影响旋翼入流和尾迹,使得旋翼尾迹在机翼附近产生严重畸变。最大下洗流速度处出现在桨叶外段,在机翼上表面相应位置处存在高压区域,并从高压中心向外逐渐减弱。桨盘外缘处压强突变,即桨盘上表面压力为负,下表面为正,形成压差产生升力,而这种压差和机翼的干扰作用则会在桨盘外缘的下方产生剧烈涡流,影响到桨盘外侧的机翼外段上表面很大一部分区域。值得一提的是,文献[12]指出旋翼诱导速度在根部小而靠近梢部处较大,与机翼发生干扰作用使得在机翼根部上表面存在流速向上的回流区即产生吸力,而其他区域则产生阻力。旋翼与机翼的相对位置、尾迹区机翼面积和形状为主要影响因素,适当的旋翼与机翼相对位置可得到较小的阻力,旋翼尾迹区的面积越大产生的阻力越大。
而旋翼附着涡和尾迹则在机翼的表面上产生的非定常气动力作用表现为与旋翼旋转相应的高频振荡,甚至会导致二阶涡,使机翼受到随时间变化的周期性的气动力和气动力矩。转换过渡飞行中旋翼转速降低而飞行器前飞速度增加,旋翼的气动力及入流均处于动态变化过程,具有复杂的非线性和非定常特性。随着前飞速度增加,旋翼和机翼所承载荷的变化,机翼对旋翼干扰加强,旋翼对机翼干扰减弱。
本文方案在转换过渡过程中,由于旋翼旋转情况不断变化,全机气动特性具有复杂的非定常与非线性特点。文献[17]对CRW飞行器的转换过渡过程的研究指出,转换过渡过程可根据旋翼转速情况分为前中末三阶段,其中在转换过渡飞行的末期,旋翼载荷极小,转速极低,此时旋翼气动特性主要受来流流场影响,在不同方位角情况下将产生不同的非对称气动力作用,非定常气动特性的机理与垂直飞行和转换过渡飞行前段存在较大区别。旋翼的气动力系数随方位角呈周期性变化,而且旋翼和全机的焦点也在周期变化,并将影响尾翼的升力线斜率。
2.3特型旋翼设计概述
该方案在垂直起降飞行时,转换为垂直起降模式,在巡航飞行时,转换为平飞模式。通过特型旋翼的减速、停转与锁定,实现垂直起降模式和平飞模式的转换;通过矢量推力系统,实现两种模式下的姿态控制和水平推进。因此,特型旋翼及矢量推进系统为该方案的关键部件。
特型旋翼的设计思路可简化为以下两个方面。一方面分别参考传统直升机旋翼的设计方法,需满足垂直起降模式下的使用需求,选定桨盘载荷Pd和功率载荷Pp等特性参数,设计旋翼直径D和转速等总体参数。垂直起降模式下,旋翼和机翼存在显著干扰现象,旋翼桨盘处诱导速度分布将受影响,同时机翼和机身等处于旋翼尾迹内的无升力部件将产生阻力,作为旋翼拉力系数的附加项,可用垂直吹风增重理论[18]进行估算。
CT=CG+CQ
(2)
式中:CT为飞机拉力系数;CG为飞机重量系数;CQ为废阻系数。
另一方面还需满足两种模式转换需求,即在平飞模式下一侧旋翼的后缘转变为前缘,因此旋翼需选择对称的平面形状和翼型(见图6),使其对全机气动力产生对称的影响。

图6特型旋翼参数
Fig. 6Parameters of multifunctional rotary wing
本文方案在平飞模式时,主要由固定式机翼承载,旋翼在锁定状态通过调整迎角承受较小气动力。该模式下旋翼展弦比较大,相较常规直升机应选用硬式桨毂,旋翼叶片应具有更大的刚度,如选用较大相对厚度的翼型、较大的几何弦长和较大刚度的结构形式。
旋翼气动设计则应侧重于垂直起降模式的性能需求,兼顾集合外形对平飞模式时刚度的影响。已有相关学者针对CRW飞行器旋翼的总体参数设计方法进行了研究,并用权重系数方法建立关于垂直起降模式和平飞模式的多目标优化模型,结果显示该类旋翼的根梢比、翼型相对厚度对固定翼模式的平飞性能有显著影响,而桨盘载荷和桨尖速度将影响旋翼旋转承载模式的垂直飞行性能,其中桨尖速度是由动力系统和旋翼几何参数决定的[19]。
但是,前后对称翼型的使用使得该类旋翼在垂直起降模式下的气动性能不佳。文献[20-22]对由椭圆弧线构建的前后对称翼型的气动特性进行了分析,结论指出其气动特性与常规翼型有显著不同,为旋转机翼翼型的设计提供了一定参考。此外,还可以通过引入新的旋翼技术来设计高性能的特型旋翼。文献[23-24]分别阐述了环量控制翼型技术和可变截面旋翼技术在旋转机翼飞行器方面的应用前景,两种方法均可以大幅度改善旋转机翼的气动性能,但需付出结构复杂度增加的代价。
综上,根据两种模式的总体技术要求,旋翼系统的构型和各项参数需综合设计,并与动力系统相匹配以达到较高的效率[25]。
2.4矢量推力系统设计概述
两侧的矢量推力装置产生不同大小和俯仰角度的推力。在全飞行周期中提供俯仰和滚转控制力矩,并在平飞模式下提供所需推力。图7所示为从垂直起降模式经过过渡转换至飞行平飞模式,矢量推力装置的推力大小和方向与旋翼反扭力矩的关系以及产生滚转控制力矩的原理(直线箭头表示矢量推力系统推力,环形箭头表示旋翼反扭力矩)。

图7矢量推力系统原理图
Fig. 7Schematic of vectored thrust system
设计方案需同时满足控制需求和推进需求。平飞模式下该系统提供全部推力F,根据既定飞行包线要求设计总体参数,其中最重要的总体参数便是推重比F0/G0,其中G0为飞行器重力,F0为该矢量推力系统台架状态的推力值,即该系统最大设计推力。平飞模式的推重比根据设计用途的主要飞行状态需求选定。垂直起降模式下,该系统主要提供偏航控制力矩,推力要求较小。另一方面,该系统机械结构需满足推力大小和俯仰分别可控的要求,如图8所示。

图8矢量推力系统动作示意图
Fig. 8Actuation diagram of vectored thrust system
2.5动力系统选型概述
该方案的动力系统设计分为发动机选型和传动系统设计两个方面。该系统为特型旋翼和矢量推力系统同时提供动力,并实现动力分配的可控性,满足全任务剖面要求,还必须考虑结构重量的要求。可从飞行器总体设计需求出发,根据高度特性、马赫数特性和耗油率等的不同,选择不同类型的发动机[26-27]。
对于不同任务需求可以得出的具体技术要求,分析对平飞性能与垂直起降性能需求的权重,可选取不同的动力系统形式。例如,将发动机布置于飞行器中部,矢量推力系统采用变距螺旋桨方案,通过传动系统将发动机功率分配给旋翼和推力矢量系统,具有横侧向控制响应快的特点,如图9所示;矢量推力装置选用涡轮风扇发动机,再通过传动机构为特型旋翼提供动力的方案,则具有较好的高速飞行特性,如图10所示。

图9中置发动机布局
Fig. 9Central engine layout

图10外置发动机布局
Fig. 10Side engine layout
3飞行性能分析
3.1平飞模式飞行特性总体概述
水平飞行特性可简化为升阻特性和动力特性的初步估算。该复合式飞行器在平飞模式下构型为类双翼布局,其飞行特性与固定翼飞机相似,故升阻特性计算基本等同于常规固定翼飞机性能估算方法[9],计算需额外考虑特型旋翼引起的阻力:
(3)
式中:q为动压;S为参考面积;CD,0为零升阻力系数;CL为升力系数;A为升致阻力系数因子;CD,Re为高度(雷诺数)修正量;CD,c为附加阻力系数增量。
分析对比该复合式飞行器的阻力系数,不难发现其零升阻力所占比例较大,气动效率相较常规固定翼飞行器略低,原因如下:
1) 考虑任务载荷与本身动力传动组件尺寸要求,机身截面取值较大;
2) 特型旋翼和矢量推力系统的布置造成多处干扰阻力明显增大;
3) 特型旋翼在平飞模式下,仅承担较小的气动载荷,气动效率较低。
结合气动性能和动力系统性能分析,可以估算矢量推力系统的可用推力和需用推力随海拔高度的变化情况(图11),而需用推力即飞行阻力,推力和需用推力曲线交点即给定飞行速度下的飞行升限。从而进行性能评估,如飞行包线、机动性能、巡航性能、起降性能和任务剖面等[28]。

图11一定速度下可用推力和需用推力随海拔高度的变化
Fig. 11Changes of available thrust and required thrust vs altitude at a certain speed
3.2垂直飞行特性总体概述
垂直飞行性能表征该复合式飞行器在垂直起降模式下完成既定起降和悬停的能力。这种模式下,由特型旋翼提供全部升力,由矢量推力系统提供控制力矩,飞行状态基本同常规直升机。所以,此时的性能分析可参考直升机的基本飞行性能进行设计和分析。其中主要垂直飞行性能为垂直上升性能,主要包括:
1) 上升速度Vy1。
2) 悬停升限HL。
最大竖直爬升速度近似方程为
(4)

概念设计阶段可用滑流理论对旋翼系统参数和性能进行初步估算,旋翼与机翼的干扰考虑机翼根部对旋翼滑流区面积的遮挡。由此可计算最小需用功率和高度的变化关系:
N=Npr+Nx+Nst+Nm
(5)
式中:N为悬停需用功率;Npr为诱导功率;Nx为型阻功率;Nst为矢量推力系统平衡反扭矩的功率;Nm为机械传动等杂项损失。
其中:Npr=Tv10
(6)
(7)
式中:T为旋翼拉力;ρ为空气密度;v10为悬停状态桨盘处的诱导速度;κ为考虑诱导速度沿旋翼展向分布的叶端损失系数,约为0.92;R为桨盘半径;Swr为翼根遮挡桨盘的投影面积。
(8)
式中:Ω为旋翼转速;mk为型阻功率系数。
型阻主要取决于旋翼产生的拉力和桨叶的升阻特性。根据叶素理论得出旋翼拉力系数CT为
CT=2T/ρπR2(ΩR)2
(9)
考虑桨叶剖面升力系数沿桨叶展向分布不均,可取旋翼特征剖面的升力系数Cy7为
Cy7=3CT/σ κ
(10)
式中:σ为旋翼实度。
根据旋翼桨叶翼型的升阻特性取对应的阻力系数Cx7。从而可得型阻功率系数mk为
(11)
式中:kp为型阻修正系数,矩形旋翼取1,随桨叶根梢比增大而减小。
矢量推力系统在垂直起降模式时用于平衡反扭矩与常规直升机尾桨起相同作用,Nst约为主旋翼所需功率的7%~10%。考虑到本文方案传动系统的复杂,传动系统的功率损失Nm取全机功率的10%。
代入发动机的高度特性和空气密度关于海拔高度的变化率(见图12),可得到竖直最大爬升速度变化曲线(见图13)。垂直飞行性能和发动机工作状态紧密相关。随着悬停高度的增加,需用功率也会增加,但是发动机的可用功率却随高度增加而下降。取Vy=0.5 m/s对应的高度,称为实用悬停升限,表征对起降场地的海拔高度的适应性和悬停作业的高度范围[18]。

图12发动机的高度特性和空气密度关于高度的变化率
Fig. 12Curves of altitude response of engine and relative air density vs altitude

图13最大爬升速度变化曲线
Fig. 13Curve of maximum climbing speed vs altitude
3.3航程和航时分析
根据以上设计方法可得到平飞巡航和悬停飞行的发动机需用功率,又结合初始技术要求,分配各飞行模式的功耗比率。再根据选用的发动机的最大耗油率参数和所选发动机(以涡轮轴发动机为例)耗油规律(见图14),可得到发动机耗油率随功率变化的曲线(见图15),并可计算出燃油量、航程和航时[27, 29]。

图14涡轮轴发动机耗油规律
Fig. 14Regularity of rated specific fuel consumption for
turboshaft engine

图15发动机耗油率随功率变化曲线
Fig. 15Curve of rated specific fuel consumption of
engine vs engine power
3.4过渡过程的操纵与转换性能分析
控制部件为特型旋翼、矢量推力系统和舵面。特型旋翼通过调整总距和循环螺距改变升力和滚转俯仰控制力矩;矢量推力系统提供偏航和滚转力矩;舵面偏转提供气动力和力矩。在不同的飞行模式下,三者作为相互独立的控制输入,如表1所示。
在转换飞行过程中,特型旋翼的控制输入量为功率和桨距(周期变距和总距),固定翼面的控制输入量为舵偏角,矢量推进系统控制输入量为功率和矢量推力参数。

表1 各飞行状态下的控制策略
已有学者对带翼式复合式直升机升阻特性随飞行速度的变化情况进行了研究[30],其加速过程与本文方案的由垂直起降模式过渡转换到平飞模式的过程相似。研究结果表明,随着前飞速度的增加,旋翼与机翼的升阻特性变化明显,机翼升力增加阻力增加,旋翼升力减小阻力减小。该构型可规避常规直升机飞行姿态与飞行速度的耦合关系。翼面系统和旋翼系统经协调控制可实现过渡转换飞行,具有良好的稳定性和操纵性。该技术是目前垂直起降飞行器关于转换过渡技术难题的一个新的解决方法。
该方案由垂直起降模式向平飞模式的过渡转换由悬停飞行开始,矢量推力系统推力增大,旋翼桨盘前倾,飞机水平加速,固定式机翼升力逐渐增大,旋翼减小总距以配平升力;当平飞速度高于其失速速度时,旋翼减速、停转并锁定,作为固定翼面承担较小载荷,飞机转换为固定翼构型,整个转换过程如图16所示。由平飞模式向垂直起降模式的过渡转换由减速平飞开始,为避免激波出现,飞机需迅速减速,使得旋翼前行桨叶桨尖空速低于其临界速度,同时旋翼加速旋转并加大总距承载,随平飞速度不断降低,旋翼升力为主导,固定式机翼卸载,飞机转换为垂直起降模式。

图16过渡转换飞行
Fig. 16Conversion flight
随着平飞速度增大,旋翼诱导功率迅速减小,型阻功率缓慢增大,整体需用功率减小,同时旋翼卸载,功率进一步减小;而矢量推力系统需用功率逐渐增大。整体需用功率随水平飞行速度呈现先减小后增大的趋势,旋翼需用功率在悬停飞行时占主导,水平加速过程中迅速减小,转换至平飞模式后飞机具有较高升阻比,在巡航点处达到最大升阻比和最小需用功率。转换过渡飞行过程中,旋翼与固定式机翼的升力随平飞速度变化规律和旋翼与矢量推力系统需用功率随速度变化规律,分别如图17和图18所示。

图17机翼和旋翼提供的升力
Fig. 17Lifts provided by fixed wing and rotary wing

图18旋翼与矢量推力系统需用功率
Fig. 18Required power of rotary wing and propulsion
system
4原理验证机实验
基于该总体布局方案,制作了一台起飞重量为5 kg的电动原理验证机(图19)。旋翼由一台电动机经减速器驱动,两个安装电动机的动力短舱布置于两边机翼后缘,直接驱动螺旋桨以提供推力。由于验证机传动系统精度不佳,机体震动较大,后更换小结构尺寸下刚度较大的“H”型尾翼。为验证垂直起降模式、平飞模式和过渡转换飞行,首先分别进行了多个子科目的飞行试验,最后进行了全任务剖面的验证飞行,其总体参数如表2所示。

图19旋翼固定翼复合式垂直起降飞行器电动原理验证机
Fig. 19Electric prototype of rotary wing and fixed wing compound VTOL
表2电动原理验证机总体参数
Table 2General parameters of electric prototype

ItemValueWingspan/m2.4Wingarea/m20.6Rotarywingdiameter/m1.2Diameterofpropeller/m0.25Takeoffweight/kg5Endurance/min5
4.1垂直起降模式飞行试验
选用两种推进螺旋桨构型进行对比:①使用固定螺距螺旋桨安装于机翼前缘提供向前拉力,通过控制两侧电动机转速和螺旋桨滑流范围内的副翼偏转,产生偏航和滚转的控制力矩;②使用变距螺旋桨布置于机翼后缘,并用电子控制器锁定电动机转速,通过控制螺旋桨螺距和动力短舱俯仰推力方向提供偏航和滚转的控制力矩。
试飞结果表明:
1) 固定式机翼对旋翼滑流有一定的干扰作用,增大了悬停需用功率;
2) 固定式机翼使得机体滚转惯量增大,但也增大了侧风对机体姿态的影响;
3) 矢量推力变距螺旋桨构型能有效提供滚转和偏航控制力矩。固定螺距螺旋桨通过控制转速改变推力大小,响应较慢,用以平衡旋翼反扭矩效果较差。悬停飞行时推进螺旋桨推力小滑流诱导速度小,拉进式布局通过滑流作用于副翼提供滚转控制力矩效果较差。
4.2平飞模式飞行试验
为模拟平飞模式时的飞行状况,使用前三点轮式起落架滑跑起降进行了无旋翼和旋翼预先锁定的对比飞行试验(见图20)。该验证机所选用旋翼直径和弦长相对机翼较小,对全机气动干扰作用较小,操稳特性变化较小。

图20旋翼锁定状态滑跑起飞
Fig. 20Takeoff with rotary wing fixed
4.3过渡转换飞行试验
最终成功进行了全任务剖面验证飞行(见图21),即由垂直起降模式起飞,随后加大矢量推力变距,螺旋桨桨距从而增大水平推力,验证机进行水平加速,再逐渐关闭旋翼电动机最终由锁定机构锁止旋翼,过渡为平飞模式飞行,反向过渡转换飞行经验证机减速飞行和旋翼重新启动,转回垂直起降模式降落。转换过渡过程平稳,各个模式飞行稳定,验证了该布局的可行性、实用性,同时对本文提出的总体参数设计方法的合理性予以佐证。

图21转换过渡飞行试验
Fig. 21Conversion flight test
5算例分析
以一台小型旋翼固定翼复合式无人飞行器为例,选用一台小型涡轮轴发动机为动力,根据上述方法展开相关总体设计工作[31]。
首先根据调研统计,确定该型具有一定工程实用价值的小型无人机的级别,初步确定起飞重量为35 kg,预计有效载荷为10 kg。通过初步计算,可确定固定式机翼、尾翼、机身和特型旋翼的基本参数。再结合同级别无人机统计数据和计算,选定发动机功率和型号,进一步完成动力传动系统的选型和初步设计。部分总体参数如表3所示。
表3小型旋翼固定翼复合式无人飞行器总体参数
Table 3General parameters of rotary wing and fixed wing compound VTOL UAV

ItemValueWingloading/(kg·m-2)17.5Wingarea/m22Wingtorotarywingshieldedarea/m21AirfoilS2027-145-83Rotarywingdiameter/m2.6Rotarywingsolidityratio0.08Diameterofpropeller/m0.5Stabilitymargin7.5%Maximumoutputpowerofengine/kW10Emptyweight/kg20
根据本文性能估算方法可计算该无人飞行器悬停需用功率和最大上升速度随高度变化的曲线;根据发动机的可用输出功率随高度变化的曲线,即可得出该无人飞行器的基本飞行性能,以及在两种模式下典型飞行状态的功率及耗油率,并根据任务剖面估算总燃油量,如表4所示。
按照平飞模式和垂直起降模式的性能分析方法,计算出了基本的性能参数,如表5所示。
综上,该设计算例各项性能指标基本满足初始设计要求。
表6将多款同级别民用无人直升机产品与该无人飞行器性能参数进行对比。可知该方案在飞行速度、航程、续航时间和任务半径方面具有显著优势;而载荷能力逊色,适用于远距离大半径且有垂直起降性能要求的作业任务。
表4发动机主要飞行状态下的耗油率
Table 4Fuel consumption of enginne under main flight
operations

ItemVerticalflightmodeHorizontalflightmodeRequiredpowerofrotarywing/W4335Requiredpowerofvectoredthrust/W7651745Hoveringefficiency0.7Engineoutputpower/W55002500Specificfuelconsumption/(kg·h-1)9.74.4Endurance/h0.250.75Totalfuelconsumption/kg5.725
表5小型旋翼固定翼复合式无人飞行器性能参数
Table 5Performance parameters of rotary wing and fixed wing compound VTOL UAV

ItemValueMaximumtakeoffweight/kg35Maximumpayload/kg15Cruisespeed/(m·s-1)31Maximumspeedatsealevel/(m·s-1)45Rangeofspeedduringconversion/(m·s-1)17-27Cruiselift-dragratio7.8Cruiseflightrange/km82.5Maximumclimbingspeedatsealevel/(m·min-1)450Hoveringceiling/m1800Levelflightceiling/m6000Missionradius/km40

表6 小型旋翼固定翼复合式无人飞行器与同级别的无人直升机性能参数对比
6结论
本文结合旋翼机和固定翼飞机的优点,提出一种旋翼固定翼复合式垂直起降概念飞行器,并对其方案设计方法进行分析研究。
1) 该方案将固定翼飞机与直升机相融合,兼具优异的悬停性能及高速飞行能力,具有转换过渡稳定平滑、可控性强的特点。通过小型电动验证机的试制和飞行试验,验证了该方案的可行性。
2) 总体设计方法围绕总体布局方案、特型旋翼、矢量推力系统等关键技术展开,并开展了平飞模式飞行特性、垂直起降模式飞行特性、航程、航时、飞行操纵等性能的分析。
3) 本文结合算例展开分析计算,显示了该方案性能指标的优异性。
4) 本文提出的总体设计方法,适用于小型旋翼固定翼复合式垂直起降飞行器,对于军用、民用小型无人机的总体设计思路具有较大的参考借鉴价值。
参考文献
[1]王冠林, 武哲. 垂直起降无人机总体方案分析及控制策略综合研究[J]. 飞机设计, 2006(3): 25-30.
WANG G L, WU Z. Configurations and control strategy for VTOL UAVs[J]. Aircraft Design. 2006(3): 25-30 (in Chinese).
[2]王焕瑾, 高正. 高速直升机方案研究[J]. 飞行力学, 2005, 23(1): 38-42.
WANG H J, GAO Z. Research on the scheme of a high-speed helicopter[J]. Flight Dynamics, 2005, 23(1): 38-42 (in Chinese).
[3]吕健. 垂直起落无人机总体方案设计与研究[D]. 西安: 西北工业大学, 2001: 1-4.
LYU J. Conceptual design and researche on the scheme of VTOL UAV[D]. Xi’an: Northwesten Polytechnical University, 2001: 1-4 (in Chinese).
[4]陈全龙, 韩景龙, 员海玮. 前行桨叶概念旋翼动力学分析方法[J]. 航空学报, 2014, 35(9): 2451-2460.
CHEN Q L, HAN J L, YUN H W. Analytical method for advancing blade concept rotor dynamics[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(9): 2451-2460 (in Chinese).
[5]BÜHLER M, NEWMAN S J. The aerodynamics of the compound helicopter configuration[J]. The Aeronautical Journal of the Royal Aeronautical Society, 1996, 100(994): 111-120.
[6]ORCHARD M N, NEWMAN S J. The compound helicopter-why have we not succeeded before?[J]. The Aeronautical Journal of the Royal Aeronautical Society, 1999, 103(1028): 489-495.
[7]STEVEN M B, THOMAS T, JOHN W R. Fixed-wingperformance predictions of the canard rotor/wing concept based on wind tunnel test results[C] //13th Applied Aerodymanics Coference. Reston: AIAA, 1995.
[8]GU S F. Aircraft conceptual design[M]. Beijing: Beihang University Press, 2001: 11-49, 170-184, 294-319, 346-403 (in Chinese).
顾诵芬. 飞机总体设计[M]. 北京: 北京航空航天大学出版社, 2001: 11-49, 170-184, 294-319, 346-403.
[9]《飞机设计手册》总编委会. 飞机设计手册6气动设计[M]. 北京: 航空工业出版社, 2000: 1-322.
Aircraft Design Handbook Total Editorial Board. Aircraft design handbook 6 aerodynamic design[M]. Beijing: Aviation Industry Press, 2000: 1-322 (in Chinese).
[10]王强, 陈铭, 徐冠峰. 复合式共轴直升机过渡模式的操纵策略[J]. 航空动力学报, 2014, 29(2): 458-466.
WANG Q, CHEN M, XU G F. Control strategy for compound coaxial helicopter under conversion mode[J]. Journal of Aerospace Power, 2014, 29(2): 458-466 (in Chinese).
[11]章异嬴. 旋翼固定翼复合式无人飞行器气动弹性分析[D]. 北京: 北京航空航天大学, 2014: 33-40.
ZHANG Y Y. Aeroelastic analysis of rotor and fixed-wing combined VTOL UAV [D]. Beijing: Beihang University, 2014: 33-40 (in Chinese).
[12]朱凌军, 复合式高速直升机悬停状态旋翼/机翼气动干扰研究[D]. 南京: 南京航空航天大学, 2005: 31-52.
ZHU L J. The wing-rotor aerodynamic interaction of the compound helicopter in hover[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2005: 31-52 (in Chinese).
[13]万佳, 陈铭. 复合式直升机前飞状态旋翼-机翼干扰计算分析[J]. 航空动力学报, 2009, 24(11): 2460-2464.
WAN J, CHEN M. Rotor-wing interaction analysis of a compound helicopterin forward flight[J]. Journal of Aerospace Power, 2009, 24(11): 2460-2464 (in Chinese).
[14]李春华, 徐国华. 倾转旋翼机旋翼对机翼气动干扰的建模及分析[J]. 空气动力学学报, 2008, 26(2): 156-162.
LI C H, XU G H. Rotor/wing aerodynamic interaction modeling and analysis of tiltrotor airceraft[J]. Acta Aerodynamica Sinica, 2008, 26(2): 156-162 (in Chinese).
[15]徐恺. 倾转旋翼飞行器旋翼/机翼/机身气动干扰计算[D]. 南京: 南京航空航天大学, 2007: 32-53.
XU K. Calculation of the aerodynamic interaction between rotor/wing/fuselage of tilt-rotor[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2007: 32-53 (in Chinese).
[16]赵飞龙. 鸭式旋翼/机翼飞行器流场及气动特性分析研究[D]. 南京: 南京航空航天大学, 2010: 28-63.
ZHAO F L. Research on the flowfield and aerodynamic characteristics of canard rotor/wing aircraft[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2010: 28-63 (in Chinese).
[17]李毅波, 马东立, 牛凌宇. 鸭式旋翼/机翼飞行器转换末段气动特性[J]. 北京航空航天大学学报, 2011, 37(3): 311-315.
LI Y B, MA D L, NIU L Y. Aerodynamic characteristic of canard rotor/wing aircraft in conversion[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(3): 311-315 (in Chinese).
[18]王适存. 直升机空气动力学[M]. 北京: 航空专业教材编审组, 1985: 2-55.
WANG S C. Helicopter aerodynamics[M]. Beijing: Aviation Professional Teaching Materials Editing Group, 1985: 2-55 (in Chinese).
[19]LEE J W, JEON K S, KIM M, et al. Rotordesign for the performance optimation of canard rotor/wing aircraft[J]. Lecture Notes in Computer Science, 2006, 3984: 932-941.
[20]KWON K, PARK S O. Aerodynamic characteristics of an elliptic airfoil at low Reynolds number[J]. AIAA Journal 2005, 42(6): 1642-1644.
[21]邓阳平, 高正红, 詹浩. 两种椭圆翼型高速气动特性实验研究[J]. 实验力学, 2009, 24(2): 103-107.
DENG Y P, GAO Z H, ZHAN H. Research on aerodynamic characters of two elliptic airfoil[J]. Journal of Experimental Mechanics, 2009, 24(2): 103-107 (in Chinese).
[22]邓阳平. 新概念旋转机翼飞机旋翼技术研究[D]. 西安: 西北工业大学, 2006: 17-30.
DENG Y P. Research on rotor technology of new concept rotor/wing aircraft[D]. Xi’an: Northwestern Polytechnical University, 2006: 17-30 (in Chinese).
[23]NIELSEN J W, JACK N. Circulation control airfoils as applied to rotary-wing aircraft[J]. Journal of Aircraft, 1986, 23(12): 865-875.
[24]ROBERT N, GEORGE J, FARHAN G. Leading- and trailing-edge reversal of a cambered airfoil for stopped rotors[C]//56th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Reston: AIAA, 2015.
[25]《飞机设计手册》总编委会. 飞机设计手册19直升机设计[M]. 北京: 航空工业出版社, 2000: 12-171.
Aircraft Design Handbook Total Editorial Board. Aircraft design handbook 19 helicopter design[M]. Beijing: Aviation Industry Press, 2000: 12-171 (in Chinese).
[26]路录祥, 王新洲, 王贯波. 直升机结构与设计[M]. 北京: 航空工业出版社, 2009: 79-131.
LU Y X, WANG X Z, WANG G B. Helicopter structure and design[M]. Beijing: Aviation Industry Press, 2009: 79-131 (in Chinese).
[27]张呈林, 郭才根. 直升机总体设计[M]. 北京: 国防工业出版社, 2006: 40-68.
ZHANG C L, GUO C G. Helicopter preliminary design [M]. National Beijing: Defense Industry Press, 2006: 40-68 (in Chinese).
[28]方振平, 陈万春, 张曙光. 航空飞行器飞行动力学[M]. 北京: 北京航空航天大学出版社, 2005: 23-165.
FANG Z P, CHEN W C, ZHAGN S G. Aircraft flight dynamics[M]. Beijing: Beihang University Press, 2005: 23-165 (in Chinese).
[29]曹义华. 直升机飞行力学[M]. 北京: 北京航空航天大学出版社, 2005: 154-183.
CAO Y H. Helicopter flight dynamics[M]. Beijing: Beihang University Press, 2005: 154-183 (in Chinese).
[30]刘成. ZF-1型高速直升机初步方案设计研究[D]. 南京: 南京航空航天大学, 2012: 39-51.
LIU C. Research on preliminary design of ZF-1 type high-speed helicopter[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012: 39-51 (in Chinese).
[31]张啸迟. 旋翼固定翼复合式垂直起降无人飞行器总体设计[D]. 北京: 北京航空航天大学, 2014: 9-57.
ZHANG X C. Conceptual design of rotor and fixed wing combined VTOL UAV[D]. Beijing: Beihang University, 2014: 9-57 (in Chinese).
张啸迟男, 硕士研究生。主要研究方向: 飞行器设计, 气动弹性设计。
Tel: 010-82316034
E-mail: nicebread@126.com
杨超男, 博士, 教授, 博士生导师。主要研究方向: 飞行器设计, 气动弹性力学, 飞行动力学。
Tel: 010-82317528
E-mail: yangchao@buaa.edu.cn
Received: 2015-09-03; Revised: 2015-10-29; Accepted: 2015-11-26; Published online: 2015-12-0410:08
URL: www.cnki.net/kcms/detail/11.1929.V.20151204.1008.004.html
Foundation items: “Fanzhou” Education Fund of Beihang University; Graduate Innovative Practice Fund Project of Beihang University (YCSJ-01-201515)
Conceptual design of rotary wing and fixed wing compound VTOL aircraft
ZHANG Xiaochi, WAN Zhiqiang, ZHANG Yiying, YANG Chao*
School of Aeronautic Science and Engineering, Beihang University, Beijing100083, China
Abstract:Vertical takeoff and landing (VTOL) aircraft technology has been developed rapidly in recent years with some breakthroughs and also unsolved issues. A rotary wing and fixed wing compound VTOL aircraft configuration is proposed, which combines the advantages of rotorcraft and fixedwing aircraft. It possesses the performance of VTOL capability and high-speed cruise. And the stability and controllability of conversion flight benefits from this configuration. The multifunctional rotary wing rotates for lift and transforms to a fixed wing surface in high-speed flight while the vectored thrust appliance provides axial thrust. A specific conceptual design method and the key technologies for this type of VTOL aircraft are discussed. The specializations of the conceptual design for airframe aerodynamics, the multifunctional rotary wing, vectored thrust appliance and power system are illustrated. The manipulation theory, flight characters and the performances of horizontal flight mode, vertical flight mode and conversion flight are analyzed. A prototype is manufactured. The results of primary flight tests prove the feasibility of this configuration.And a design example has been analyzed according to this method. The accuracy and practicality are proved by the results.
Key words:vertical takeoff and landing aircraft; rotary wing; compound aircraft; conceptual design; performance analysis
*Corresponding author. Tel.: 010-82317528E-mail: yangchao@buaa.edu.cn
作者简介:
中图分类号:V275+.2
文献标识码:A
文章编号:1000-6893(2016)01-0179-14
DOI:10.7527/S1000-6893.2015.0322
*通讯作者.Tel.: 010-82317528E-mail: yangchao@buaa.edu.cn
基金项目:北京航空航天大学凡舟基金;北京航空航天大学研究生创新实践基金项目(YCSJ-01-201515)
收稿日期:2015-09-03; 退修日期: 2015-10-29; 录用日期: 2015-11-26; 网络出版时间: 2015-12-0410:08
网络出版地址: www.cnki.net/kcms/detail/11.1929.V.20151204.1008.004.html
引用格式: 张啸迟, 万志强, 章异嬴, 等. 旋翼固定翼复合式垂直起降飞行器概念设计研究[J]. 航空学报, 2016, 37(1): 179-192. ZHANG X C, WAN Z Q, ZHANG Y Y, et al. Conceptual design of rotary wing and fixed wing compound VTOL aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(1): 179-192.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
猜你喜欢
建材发展导向(2022年20期)2022-11-03
科学家(2022年3期)2022-04-11
北京航空航天大学学报(2021年9期)2021-11-02
建材发展导向(2021年7期)2021-07-16
军民两用技术与产品(2021年9期)2021-03-09
流行色(2019年7期)2019-09-27
电子制作(2019年9期)2019-05-30
考试周刊(2017年7期)2017-02-06
科教导刊·电子版(2016年26期)2016-11-21
科教导刊·电子版(2016年25期)2016-11-16