仿生全翼式太阳能无人机分层协同设计及分析
2016-05-05 07:03甘文彪周洲许晓平
航空学报 2016年1期
关键词:性能分析
甘文彪, 周洲, 许晓平
1. 北京航空航天大学 无人驾驶飞行器设计研究所, 北京 100191
2. 西北工业大学 航空学院, 西安 710072
仿生全翼式太阳能无人机分层协同设计及分析
甘文彪1, *, 周洲2, 许晓平2
1. 北京航空航天大学 无人驾驶飞行器设计研究所, 北京100191
2. 西北工业大学 航空学院, 西安710072
摘要:结合“太阳神”无人机(UAV)和高山兀鹫提出了太阳能UAV的某仿生全翼式构型,针对该构型开展了气动分层协同设计及分析。在设计和分析过程中,自下而上将设计分为三个层次,基于纵向配平需要以低雷诺数反弯内翼翼型设计为第一设计层次,基于高升力需求以外翼设计为第二设计层次,以UAV全机性能设计为第三设计层次;与此同时,每个层次均采用基于代理模型的基本优化流程,三个层次的设计自上而下来相互协同,最终得到满足指标的设计结果。研究结果表明:分层协同设计提高了设计效率,获得了高效的仿生全翼式太阳能UAV构型;证明了设计方法的可行性和设计结果的有效性。
关键词:仿生全翼式; 太阳能无人机; 分层协同优化; 气动设计; 性能分析
太阳能无人机利用太阳光辐射能作为动力,未来可作为绿色长久可持续飞行平台,在军民用方面都具有广阔的应用前景。为了满足任务需求,太阳能无人机一般需要更高的飞行高度、更强的气动效能和更大的光伏组件吸收面积。因此,目前迫切需要开展高空高效太阳能无人机的总体气动设计研究。
长期以来,由于气动设计分析水平所限,太阳能无人机大量采用大展弦比常规布局,设计研究重点关注的是翼型及机翼设计[1-7],但是为了实现“永久”可持续任务,显然需要更多地关注太阳能无人机的三维全机气动设计。
近年来,太阳能无人机的气动设计相关研究逐步得到深入。Marchman和Abtahi[8]对展弦比8的低雷诺数机翼进行了分析,Liu[9]分析了Wortmann机翼的非定常流动特性,Muller[10]和Lian[11]等分别对微型飞行器低雷诺数空气动力学特性进行了回顾,白鹏[12]对微型飞行器低雷诺数若干空气动力学问题进行了详细研究,肖天航[13]研究了低雷诺数非定常流场的数值模拟方法及其在微型飞行器上的应用,这些研究关注了低雷诺数下的机翼气动特征,为高空太阳能无人机所面临的低雷诺数气动问题的分析奠定了基础。Esmaeel等[14]针对Parastoo太阳能无人机进行了气动分析和优化选型。甘文彪[15]研究了改进的层流动能模型并将其应用到低雷诺数太阳能无人机的气动设计及分析,李沛峰等[16]开展了基于工程的跨声速机翼两步优化设计方法,李焦赞和高正红[17]对多变量气动设计问题分层协同优化进行了研究。这些以及更多的研究[18-20]主要基于常规布局,为太阳能无人机设计提供了参考。而为得到更好的气动性能,常规布局一般需要增大展弦比,这将极大地增加气动弹性等方面的设计难度。于是,太阳能无人机新布局应运而生。
“太阳神”无人机采用了全翼式布局(没有典型尾翼),高山兀鹫飞翔时具有类全翼面式特征。本文将 “太阳神”无人机和高山兀鹫结合提出一种新布局。针对这种新布局,探索性地对其开展了气动设计及分析研究。
1分层协同设计及分析方法
为了降低设计的计算量和提高分析的精细化水平,针对太阳能无人机需要开展分层协同设计和分析。全文研究将侧重于两个方面:一是阐明具有系统级特征的气动分层协同设计思路的实现过程(对应第1节);二是设计结果的检验性分析(对应第2节)。 在设计思路的实现方面:首先,提出了某仿生全翼式太阳能无人机构型,并确定了分层协同设计的基础;其次,针对该构型将确定具体的分层协同设计思路;接着,将回顾分层协同设计所采用的灵敏度分析方法;最后,将介绍各设计层次中所采用的具体优化流程。
1.1仿生全翼式太阳能无人机构型的提出
为了利用太阳能实现“绿色永久飞行”,太阳能无人机应具有尽可能高的气动性能和尽可能大的光伏组件铺设面积。长期以来,太阳能无人机往往采用常规布局,很难挖掘气动和能源系统的效能。因此,“太阳神”无人机采用了全翼式布局,但由于采用多级拼接使全机的展弦比过大,从而导致飞行稳定性和气动弹性方面所存在的问题突出。 而高山兀鹫的外形具有类全翼面式特征,其鹫身具有升力翼面的构造,可以将两者结合得到一种仿生全翼式太阳能无人机构型。这种构型的设计思路是:①以“太阳神”无人机的单级构型为出发点;②不依赖单纯增大展弦比来提高升阻性能;③结合高山兀鹫鹫身的升力翼面外形;④在“太阳神”无人机单级基础上,以类鹫身升力翼面作为机身;⑤依据高山兀鹫飞翔时腹部外形,给出端板和方向舵,确定初始构型。仿生全翼式太阳能无人机的构型如图1所示。

图1仿生全翼式太阳能无人机(UAV)
Fig.1Bionic full-wing typical solar-powered unmanned aerial vehicle(UAV)
1.2分层协同设计的基础
在确定具体的分层协同设计思路之前,首要的是确定设计的基础。这包括2个部分:①基本构型的气动分析和确定;②设计思路的出发点。
在进行基本构型的气动分析和确定时:首先,基于1.1节提出的仿生全翼式太阳能无人机构型,采用工程快速算法等方法进行基本的构型配置,得到初始基本构型(简称基本构型);其次,针对基本构型,采用精细化方法(如改进的层流动能模型方法)进行数值模拟,得到基本的流动特征、气动性能以及飞行品质;接着,确定流动特征、气动性能和飞行品质中的核心点,并确定一般意义上的设计目标和约束条件(这里以纵向气动性能为设计目标,以横航向飞行品质为约束和后验条件);最后,围绕设计目标,基于飞行品质来寻求设计思路的出发点。
针对设计思路的出发点:首先,以基本构型为蓝本;其次,依据横航向飞行品质要求,以相似准则(如展向和弦向面参数等比例变化)和严格限定部分面参数(如上反角设计空间较小);接着,分析可得,内翼是影响升阻性能和纵向力矩配平的主要因素之一,外翼是影响升阻性能的主要因素之一,为寻求纵向气动性能最优,期望采用自下而上的思路来分解设计层次;继而,分析各设计层次,需要相互协同修正来满足宏观设计指标,因此,需要采用自上而下的思路来协同;最后,设计思路的出发点可概括为自下而上来分解层次,自上而下来协同设计。层次分解是为关注影响全局的主要局部因素;协同设计是为了紧扣全局设计目标。分层协同设计的各层次本质上不区分层级高低,当然,全机层次与全局设计目标具有最直接的相关性,对该层次最终设计结果的气动性能和飞行品质需要进行后验型分析。设计过程中,将只给出设计结果的基本气动性能分析,而飞行品质的后验型分析将不涉及(其将是一个需要后续深入分析的研究主题)。
1.3分层协同设计的思路
在确定基本构型后,需要分解设计过程,研究的出发点是:依据自下而上的思路,确定具有系统级特征的设计层次,即“内翼翼型→外翼→全机”层次分解;遵循自上而下的思路对各层次进行协同,适时修正设计空间和约束条件,最终设计得到高效全机构型。分层协同设计框架如图2所示。

图2分层协同设计框架
Fig.2Multilevel collaboration design framework
设计过程可概括为以下5部分:①确定无人机仿生的全翼式基本构型和设计的层次水平数,即在“太阳神”无人机基础上耦合大弦长的内翼,可依据内翼、外翼和整机自下而上来划分层次; ②基于配平需要确定内翼设计为第一设计层次,分析内外翼的重要性,显然内翼是主要的配平高升力部件,要有针对的设计内翼翼型;③ 基于高升力需求确定外翼设计为第二设计层次,外翼为采用近似直翼布置的重要升力部件,需要开展翼型和机翼设计;④确定全机综合设计为第三设计层次,主要针对安装角、上反角、前后缘曲线以及端板尺寸等面参数;⑤各层次的协同,如果不满足总体设计确定的指标,则返回第一层次继续设计,直至得到可行的设计结果。
在各层次协同时要特别注意4点:①各层次设计需要针对设计目标和力矩约束来开展灵敏度分析;②各层次设计时要得到全部设计变量在本层次内的灵敏度分析结果,并提炼出重要设计变量;③依据各层次的抽样结果,以重要设计变量来划分水平因次并重新确定其设计空间,与此同时,适时调整下一层次的设计目标;④ 各层次灵敏度分析结果细分给其他层次,例如,以第二层次得到的力矩灵敏度分析结果为依据,下一轮设计时可改变第一层次设计的力矩约束。
1.4分层协同设计的灵敏度分析方法
灵敏度分析伴随着整个设计过程,每一设计层次的灵敏度分析都需要确定重要设计变量。重要设计变量的主要用途是:以其灵敏度分析结果为依据,来适时调整本层次内设计变量的设计空间,并用来协同修改其他层次的设计约束和设计目标。灵敏度分析的过程如下:
1) 层次内的灵敏度分析,所采用的计算原理公式为
(1)
(2)

由于灵敏度分析在抽样结果的基础上展开,而抽样的前提可以确定变量具有正态分布特征,经过分析推导,正态分布变量的灵敏度分析公式与标准正态变量相同[17],这样可以极大简化灵敏度分析的计算过程。
2) 层次内重要设计变量的确定。在各层次内依据灵敏度分析结果,保留主效应因子和交互因子较大的变量为重要设计变量。
3) 重要设计变量的灵敏度分析的作用。在各层次优化设计结果的基础上,依据重要设计变量灵敏度分析的结果,重新确定设计空间,与此同时,适时调整下一层次的设计目标。
4) 依据各层次灵敏度分析结果,自上而下修改低层次设计的约束,直至满足设计停止条件。
1.5设计中的优化流程
在每一层次的设计过程中都采用基于代理模型的基本优化流程,如图3所示。
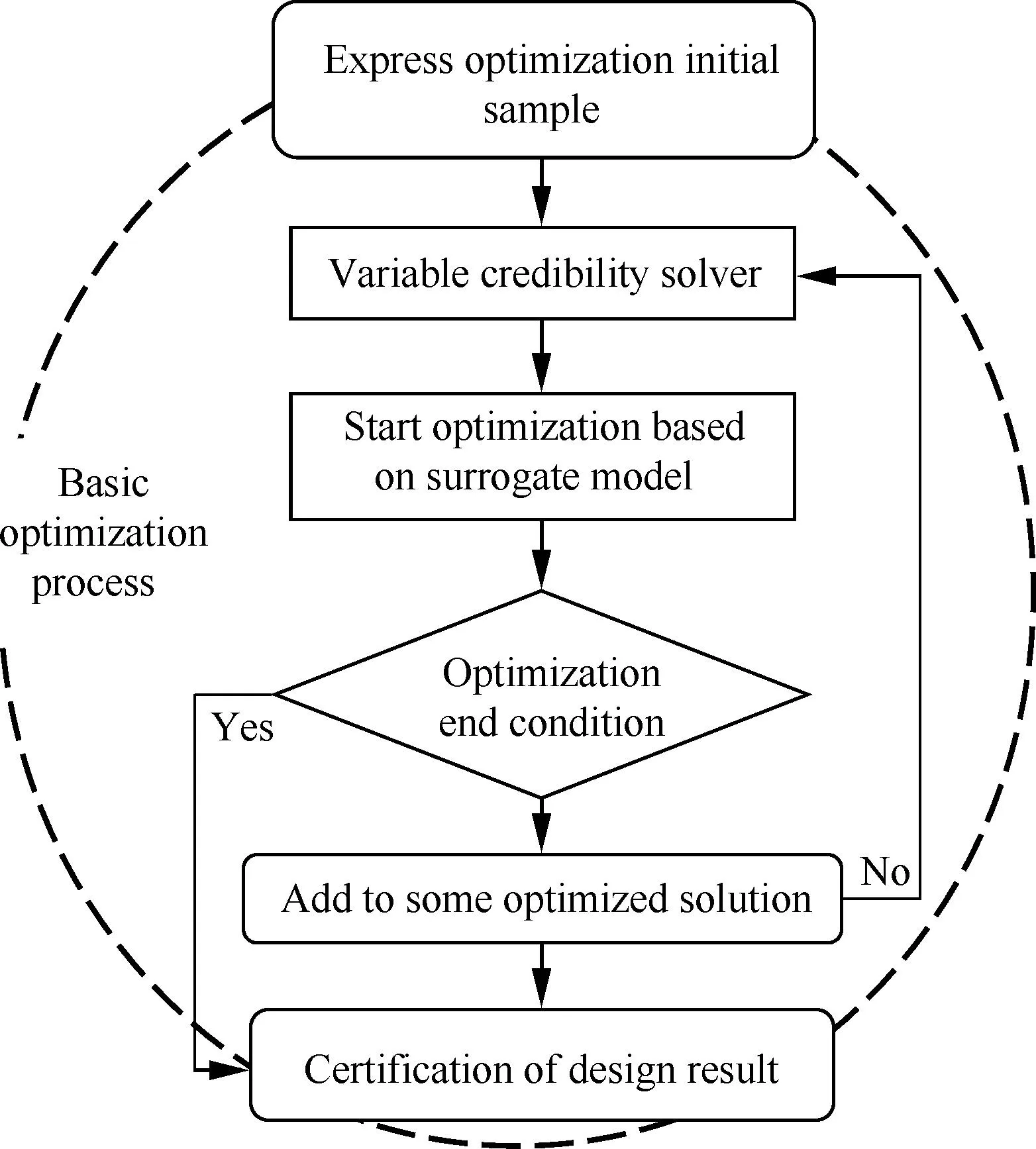
图3基本优化流程
Fig.3Basic optimization process
优化流程包括5个部分:①参数化表达和初始抽样; ②变可信度的求解;③依据代理模型来优化;④增加新样本点继续优化;⑤验证设计结果。每一层次优化流程的详细参数将在设计结果分析部分给出。
特别需要指出的是基于代理模型开展优化时,以改进的层流动能模型方法(Modifiedk-kL-ω)作为精细求解方法,二维设计采用Kriging代理模型,三维设计时采用径向基函数(Radial Basis Function,RBF)作为代理模型,优化算法采用多目标免疫遗传算法,优化流程的更详细情况可参见文献[15]。一般情况下,变量数目不是很多时,一个优化流程内,基于代理模型以200个体编码的抗体群进化30代。
1.6优化流程中的数值模拟方法
精细化分析时,所采用的改进层流动能模型方法包括以下输运方程:
(3)
(4)
(5)
其中特别指出的是,式(5)中比耗散率产生项:
(6)
式中:kT为湍动能;kL为层流动能;ω为湍流比耗散率;S为剪切率;PT和PL分别为湍动能和层流动能的生成项;RB和RN分别为旁路和自然转捩生成项;ν和αT分别为层流和湍流的运动黏性系数;Pλ为长度尺度无量纲比值;d为壁面距离;νTS为小涡湍流黏性;Cf1为分离流转捩相关参量;C×为无量纲参数(下标×指代式中不同下标)。模型参数详细定义可参见文献[15]。
为验证数值方法的有效性,针对展弦比为8.9的FX-63-137低雷诺数机翼三维流动特征进行了数值模拟[15]。该机翼绕流存在三维分离气泡、转捩、湍流以及翼尖涡干扰等特征。
图4给出了升力系数CL和阻力系数CD的计算结果与实验值的对比。由图4可知,宏观上计算结果与实验值吻合较好;但大迎角时(α=14°),误差仍较大,这是因为流动出现了大分离数值模拟的精度降低。图5为典型状态的机翼表面极限流线(以压力系数Cp表征)。由极限流线可知,流动在机翼上形成了三维大范围的显著分离,在分离线和再附线之间的分离区压力系数变化很小;由于翼尖涡的存在,流动在翼尖发生了较大范围的分离,并在展向95%位置的后缘诱导出小范围的二次分离;与此同时,转捩位置也受到了翼尖涡的影响。
计算结果表明:数值模拟方法能较好地模拟典型低雷诺数机翼的宏观气动特性和基本流动特征。数值模拟方法更详细的验证可参阅文献[15]。

图4计算与实验结果的对比
Fig.4Comparison of computation and experiment results

图5典型状态的机翼表面极限流线(α=3°)
Fig.5Limit streamlines of the wing at typical state
(α=3°)
2设计结果及分析
对于复杂的设计系统来说,分层协同设计就是要把复杂的设计问题分解为几个简单的子系统层次的设计问题,而各子层次通过相互协作来完成设计。结合总体方案和太阳能无人机设计现状,确定设计指标为巡航最大升阻比Kcruise>32, 巡航速度下的力矩系数有dCm/dCL≤-8%。依据设计指标和第1节的设计方法,这里重点阐述设计问题的实现和设计结果的基本分析。设计过程有多轮各层次的协同设计,在结果分析中,仅给出最后一轮协同设计的结果。
2.1内翼层次的设计
2.1.1内翼翼型设计问题的实现
对全翼式构型来说,内翼对保持全机配平和提高升阻性能具有重要意义。因此,开展第一层次的设计(反弯内翼翼型设计)。鉴于精细化描述反弯特征的需要,应该采用较多的设计变量来描述翼型的局部变化。于是,采用Hicks-Henne型函数方法来参数化翼型。该方法的翼型垂向坐标确定公式为
(7)
(8)
式中:y为翼型初始垂向坐标值;yb为初始垂向坐标值;yi为垂向加权扰动坐标值;ai为加权值;n和m为常数;a1~a9对应的n为3,m为0.1~0.9;a10对应的n为1,m为0.95。对翼型的厚度和中部进行约束,即厚度不小于原始翼型,翼型中部要平滑过渡。设计时上下表面共有20个设计变量。
在Hicks-Henne型函数调整后将得到更新翼型,针对更新翼型需要开展网格的自动生成,采用无限插值技术[15],通过程序来进行网格变形重构,从而实现网格的自动生成。设计过程包括139次计算流体力学(CFD)求解,经过了3轮的协同设计(即设计系统各层次协同,使该层次约束和目标发生了3次修正,1.5节的优化流程在该层次运行了3次),并进行了相应的代理模型重构。
基于灵敏度分析结果,经过协同设计的修正,最后一轮设计的数学模型表达形式为
max:K1,K2
(9)

2.1.2内翼翼型设计结果分析
在设计过程中,基于全机配平的需要来设计反弯翼型,设计变量空间依据反弯特征和各层次的协同来确定。表1给出了内翼翼型设计的效率。方法1指通常的基于代理模型优化方法、方法2为直接优化方法、方法3为分层协同优化方法,Shape指CFD计算的外形数目, Time为总机时。翼型每次CFD计算费时10 min,每轮优化算法计算费时1 h,由方法1和方法2的总时间预估得到,下文同。显然,分层协同优化方法效率较高且兼顾了全局协同。

表1 内翼翼型设计效率
图6给出了翼型外形对比图。设计翼型为大反弯翼型,在翼型上表面1/4位置处曲率变化比较平滑,有利于调控分离气泡位置和焦点位置。
图7为内翼原始与设计翼型在设计雷诺数下的气动性能对比图。由图可知,相同迎角时设计翼型的升阻比有较大提高(最大升阻比由53.5提高到68.4);设计翼型力矩系数为0.02左右。设计翼型在力矩性能、飞行可用边界优于原始翼型。
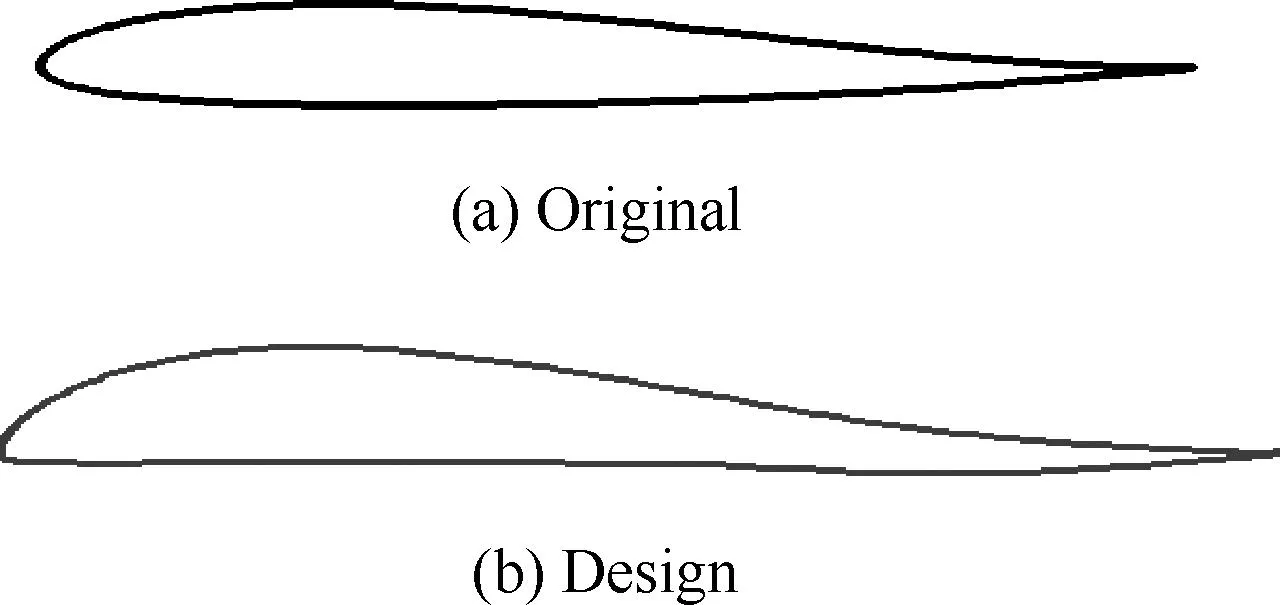
图6内翼翼型外形对比
Fig.6Shape comparison of inner wing airfoil
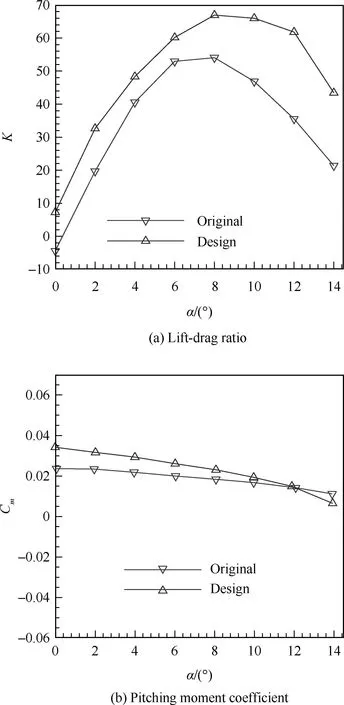
图7设计与原始翼型在设计雷诺数下的气动性能的比较
Fig.7Comparison of aerodynamic performance of design and original airfoil at design Reynolds
图8给出了巡航时内翼原始与设计翼型的压力系数Cp和摩擦阻力系数Cf的对比。由图可知,在典型状态(Re=2.6×105,α=8°)下,相比原始翼型,设计翼型分离靠后,且分离区较小,具有更小的压差和摩擦阻力。
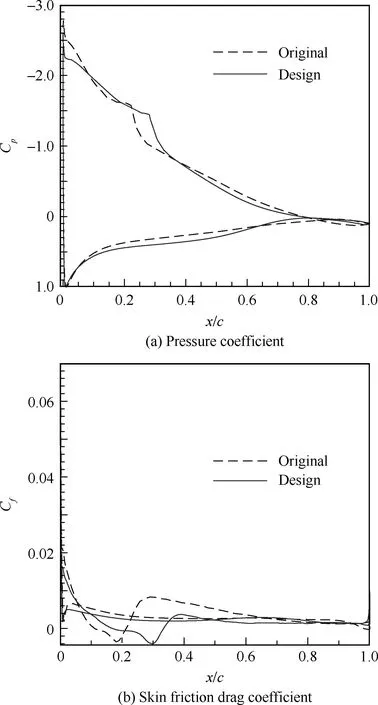
图8原始与设计翼型的压力系数和摩擦阻力系数的比较(Re=2.6×105, α=8°)
Fig.8Comparison of Pressure coefficient and skin friction drag coefficient of design and original airfoil (Re=2.6×105, α=8°)
图9为内翼设计翼型(Re=2.6×105,α=8°)的湍动能图。由图9可知,层流分离气泡起始于翼型焦点附近,湍动能的变化反映了翼型上表面由层流转捩到湍流的流动发展特征;在分离气泡区,湍动能的增长逐渐变得迅速;以致流动发生转捩,进而形成流动再附现象;全局的湍动能变化反映出边界层变化和分离转捩直接相关。
为了给全机层次设计提供协同所需的内翼气动参数,进一步在不同雷诺数下开展了计算,状态为Re=5.0×104,1.0×105,2.0×105,2.6×105,3.0×105,4.0×105。图10为不同雷诺数下的气动性能。由图10可知,在Re>1.0×105时翼型升阻比和力矩性能变化较小,在α=0~10°维持较好的升力系数线性段,力矩系数基本不变;随雷诺数减小,气动性能下降,特别是Re=5.0×104时气动性能显著降低。

图9内翼设计翼型的湍动能kT(Re=2.6×105, α=8°)
Fig.9Turbulent kinetic energy kTof inner wing design airfoil (Re=2.6×105, α=8°)
2.2外翼层次的设计
无人机所采用的大展弦比外翼对全机性能影响较大。协同内翼设计结果和全机需求,每轮外翼层次的设计分为两步:翼型和机翼三维面设计,设计过程应用优化流程。翼型设计把握了二维性能,应用翼型设计结果来开展面参数设计,这样既可以提高效率又能对比二维和三维的差别。
2.2.1外翼翼型的设计
设计过程包括143次CFD求解,经过了5轮的协同设计,优化流程自动化实现。采用类函数/形状函数变化 (Class function/Shape function Transformation,CST)方法[15]来参数化翼型(原理如式(10)),共10个设计变量,采用无限插值技术来进行网格变形重构,实现网格自动生成。

图10内翼翼型气动性能
Fig.10Aerodynamic performance of inner wing airfoil
Z(ψ)=Cψ(ψ)Sψ(ψ)+Tψ(ψ)
(10)
式中:Cψ为分类函数;Sψ为形状函数;Tψ为厚度函数;ψ为多项式函数的自变量。
基于灵敏度分析结果,经过协同设计的修正,最后一轮设计模型的数学表达式为
max: K1,K2

(11)
式中:K1为Re=2.6×105、α=4°时的升阻比;K2为Re=2.6×105、α=6°时的升阻比。不等式约束中包括翼型相对厚度不小于10%,dCm/dCL≤-10%为α=0~10°的力矩系数隐约束。
设计的基本流程与内翼层次一致,这里只给出设计翼型的气动性能,为下一步三维面参数设计奠定基础。图11为设计翼型在不同雷诺下的气动性能。由图11可知,设计状态α=4°,6°的升阻比分别为69.4和89.6;随雷诺数减小,翼型气动性能下降,在 Re≤1.0×105时升阻比显著降低。
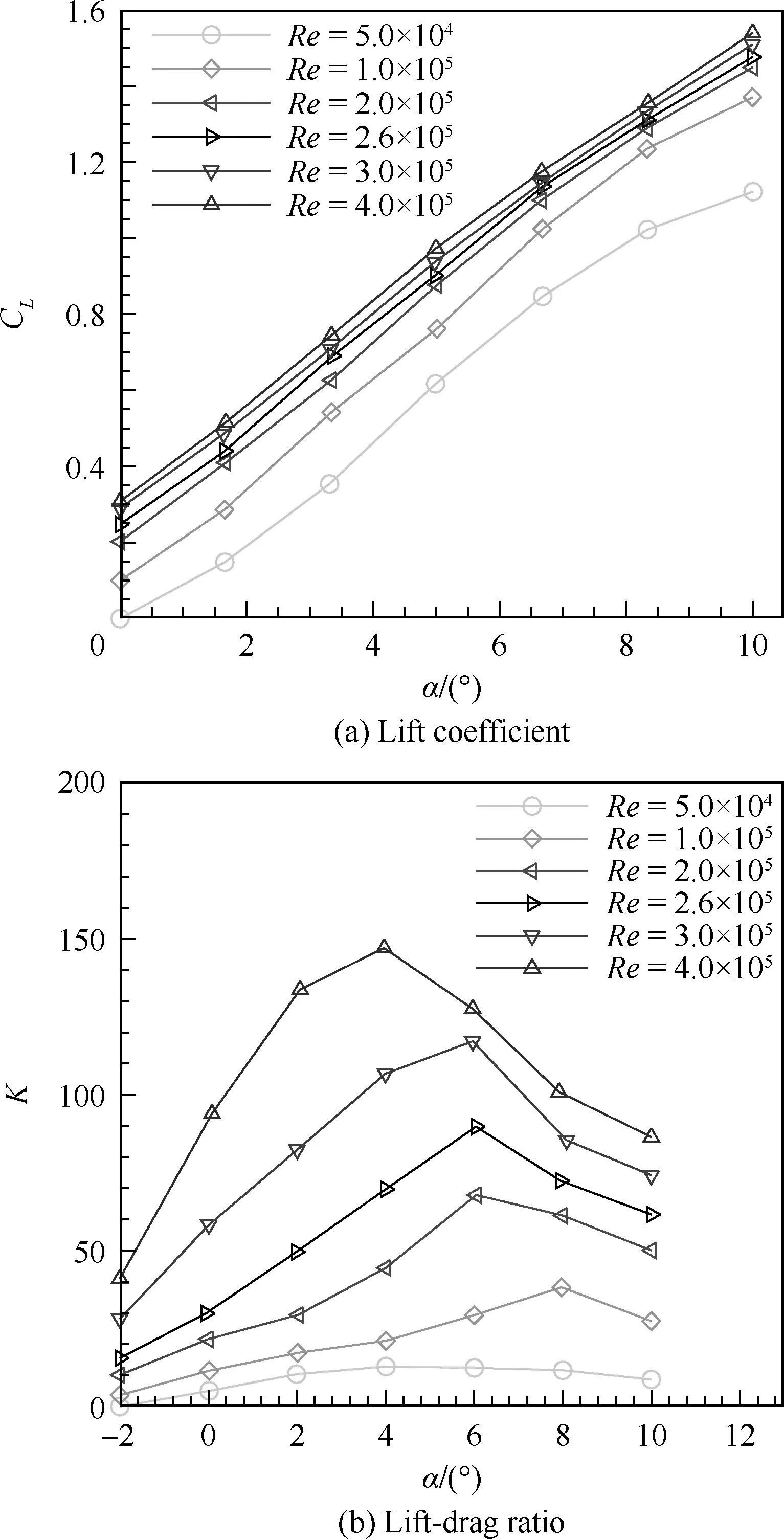
图11外翼翼型气动性能
Fig.11Aerodynamic performance of outboard wing airfoil
2.2.2外翼三维面参数的设计
外翼三维面参数设计时,必须兼顾高升阻特性和仿生全翼融合特性。为此,采用小后掠并翼尖圆滑过渡的近似直翼,整体上看类似比较规整的秃鹫翅膀,这样既有低诱导阻力的仿生特征,又能充分使设计翼型的优势在三维得到体现。
具体的机翼面参数化为: ①按照全机设计层次的要求,来约束翼面面积,对翼面截面的弦长也做出合理约束;②确定面参数设计变量,翼面上反角,内段、中段、外段和翼尖的外侧截面弦长,以及主升力机翼四段前缘的后掠角,外段和翼尖的前后缘边线为三次曲线(共两条,除前后掠决定控制点坐标外,含设计变量8个),各曲线可分别表示为式(12)的形式,法向则由上反角来控制,共17个变量。
z-z0=[a1(y-y0)+b1(y-y0)2+
c1(y-y0)3]
(12)
式中:y0和z0为初始曲线坐标值;y和z为变化后的曲线坐标值;a1、b1和c1为曲线控制变量。在优化流程中,通过程序来修改三维面设计变量,应用非均匀有理B样条(Non-uniformRationalB-Splines,NURBS)曲面来使其转化为数字曲面的特征控制量,进而针对数字曲面采用无限插值技术来更新实体模型。针对更新实体模型仍然基于无限插值技术实现网格的自动生成。以RBF为代理模型,包括191次CFD求解,经过了7轮的协同设计,依据协同设计时灵敏度分析结果,适时修正设计变量的设计空间,确定设计约束。最后一轮设计的设计模型的数学表达式为
max:K1, dCm1/dCL1

(13)
式中:K1为Re=2.6×105、CL=0.8时的升阻比;K2为Re=2.6×105、CL=1.0时的升阻比;dCm1/dCL1为Re=2.6×105、CL=0.8~1.0时的力矩系数稳定度。
图12为原始与最终设计的翼面边线对比,设计后边线过渡平滑,前缘后掠角增大。

图12原始和设计外翼的翼面边线
Fig.12Original and design outboard wing edges
表2为外翼层次设计的效率。翼型每次CFD计算费时10min,每次三维CFD计算费时5h,每轮优化算法计算费时1h。显然,分层协同优化效率较高且能够兼顾全局协同。

表2 外翼设计效率
图13给出了不同状态的外翼阻力系数对比。图中:Cru指代Re=2.6×105、CL=0.8时的巡航状态,HA指代Re=2.6×105、α=8°时的大迎角状态,N为状态排序号(指代第几个状态),下文同。由图13可知,通过设计,巡航状态的压阻和摩阻均有一定减小;在大迎角状态下,设计机翼的压差阻力有极大地增加,这是流动分离的必然结果。图14为(最后一轮设计的) 外翼设计指标结果对比。由图14可知,通过优化设计,外翼升阻比有提高(最大升阻比由31.3提高到32.7),力矩性能有明显改善。
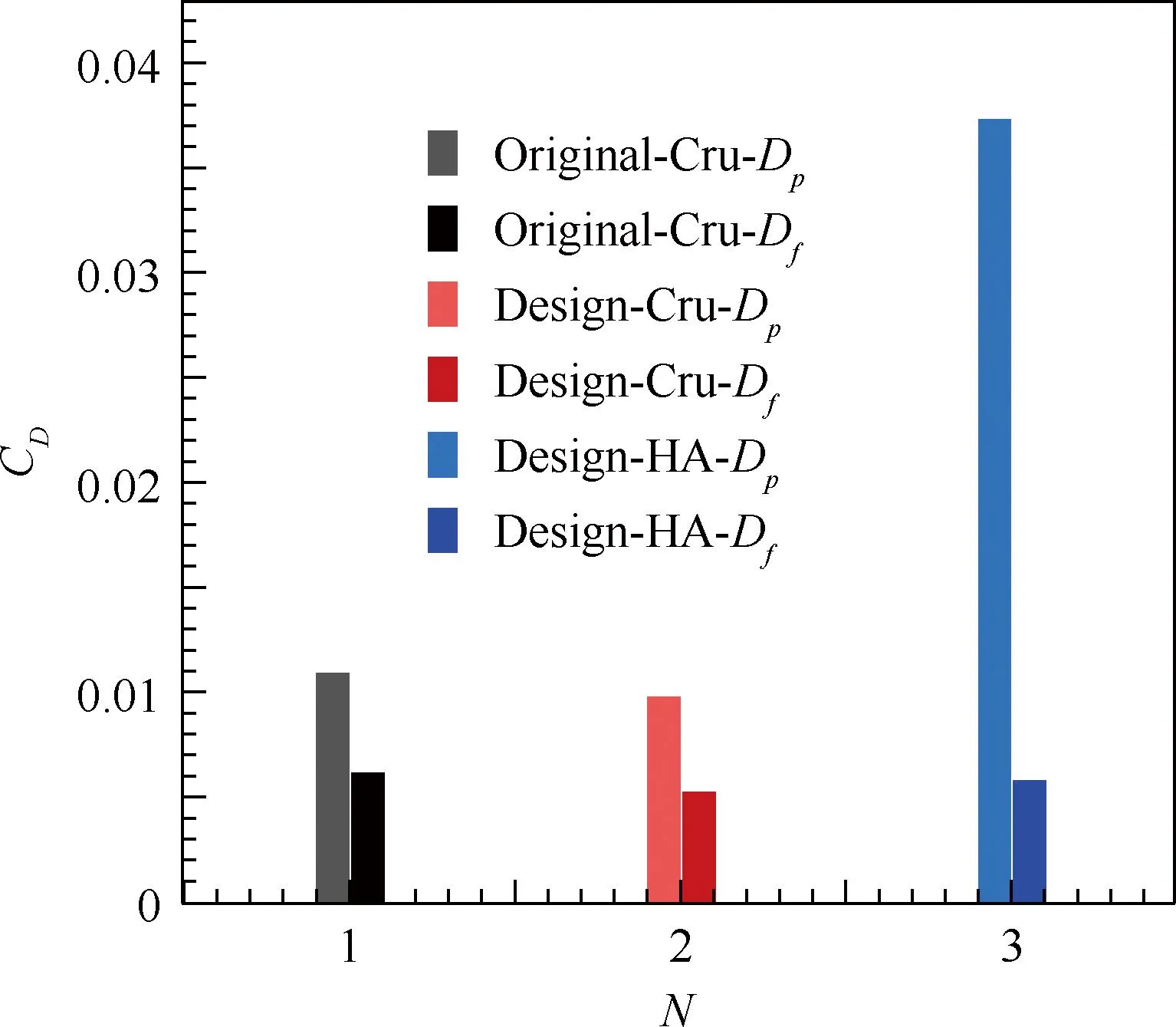
图13外翼的阻力系数对比
Fig.13Drag coefficient comparison of outboard wing
为了给全机层次提供协同所需的气动参数,在不同雷诺数下(Re=1.5×105,2.6×105,4.0×105),对外翼开展了计算,图15为计算的气动性能。
由图15可知,随雷诺数减小,外翼的升阻比有明显的下降,但仍能维持较好的力矩性能。外翼三维性能的宏观变化趋势与翼型具有一致性(如在相近升力系数下得到最优升阻比)。
通过分步开展设计,提高了外翼层次的设计效率,并较好地提高了外翼的气动性能。

图14外翼设计指标结果
Fig.14Design index result of outboard wing

图15外翼气动性能
Fig.15Aerodynamic performance of outboard wing
2.3全机层次的设计
2.3.1全机层次设计问题描述
全翼式太阳能无人机全机层次设计主要研究:仿生机身设计、内外翼匹配、机腹端板和方向舵布置设计。而升降舵采用多段翼布置方式,全机构型设计时与机身融为一体。从仿生、配平和制造的要求出发来初步确定设计空间,由内翼和外翼协同设计结果来修正全机层次的设计空间和约束。
全机构型具体参数化为:①充分应用外翼层次设计结果,外翼的安装角和上反角作为设计变量;②确定机身与外翼之间过渡段,其前后缘曲线为设计变量;③确定机身外形,机身前后缘曲线作为变量,内翼层次设计翼型作为对称截面;④给出端板形态,其位置和尺寸为设计变量;⑤ 选取常用典型翼型方向舵截面,其尺寸及安装位置为设计变量;⑥依据宏观设计指标和第一、第二层次设计的结果来确定约束条件。
具体设计参数有:机身段和过渡段前后缘三次曲线,端板位置坐标,端板厚度、长度,方向舵位置坐标,方向舵长度,主升力机翼安装角和上反角,共15个设计变量。各三次曲线的表达式与式(10)相同。
实体更新和网格重构方法与2.2.2节相同。以RBF为代理模型,包括153次CFD求解,经过了14轮的协同设计,当全机面参数不变时,匹配第一层次首轮(内翼)设计结果得到第1轮全机设计构型,在此基础上匹配第二层次首轮(外翼)设计结果就得到第2轮全机设计构型。
2.3.2全机层次设计结果及分析
依据宏观设计指标和第一、第二层次协同设计的结果。设计模型的数学表达形式为
max: K1
(14)
后两个约束为隐约束,K1为Re=2.6×105、CL=0.7时的升阻比;K2为Re=2.6×105、CL=0.9时的升阻比。依据总体指标要求和初始外形的分析结果,起飞和最大飞行高度状态的配平升力系数分别约为0.5和0.9,需要特别指出的是:为了减小设计的计算量,设计只以K1为目标,对K2施加罚函数约束,这一层次的设计仅在得到最终结果后,才对不同状态的气动特性进行检验。
表3给出了全机设计的效率。每次全机CFD计算费时5h,每轮优化算法计算费时1h。显然,分层协同优化设计极大地提高了效率,同时极大地降低了设计难度。
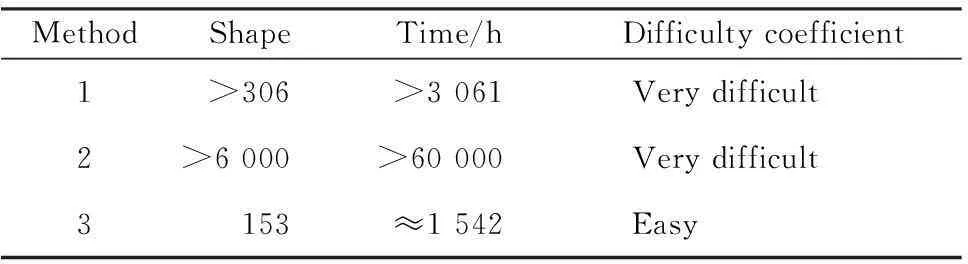
表3 全机设计效率
在设计过程中,多轮协同设计的设计目标变化如图16所示。由图可知,全机设计点升阻比由最初15.3到第1轮的23.4,再到第2轮的26.4,最终逐渐上升到34.4。显然,内、外翼首轮协同极大地影响了全机的气动性能,这说明了翼型和机翼对仿生全翼式太阳能无人机也很重要。进一步分析可反映出:在经验缺乏时,基本构型很难完整体现设计思想,同时也表明针对这种仿生构型进行分层协同设计的潜力巨大。
图17给出了全机的阻力系数对比。由图可知,相比基本构型,设计构型巡航状态的压阻有显著减小,摩阻也略有减小;相比巡航状态,设计构型大迎角时的压差阻力有极大地增大,这是大迎角下流动分离所导致的必然结果。
为检验无人机不同状态下的基本气动特性,计算分析了起飞、巡航和最大高度的飞行状态时的气动性能,此时,所对应的雷诺数Re=4.0×105,2.6×105,1.5×105。图18为全机设计构型在不同飞行状态下的气动性能。

图16更新优化次数与最优解变化
Fig.16Number of update optimization times changing with optimal solution

图17全机的阻力系数对比
Fig.17Drag coefficient comparison of full-aircraft
由图18可知,随雷诺数减小,最大升力系数略有减小,阻力系数有一定的增大,最大升阻比有明显的下降(由36.4到34.4再到30.3),仍能维持较好的力矩性能。
图19为Re=2.6×105、α=0°时全机设计构型巡航的流场,反映了过渡段和翼尖的绕流特征;机身及过渡段流线表明方向舵和机翼上反使过渡段流线发生了偏折,但影响区较小;翼尖绕流表明翼尖涡集中影响了翼尖区域的流线和压力系数分布。图19(c)为小涡湍动能kTS分布图,反映了流动的转捩特征,显然机身在中部流动发生了转捩,而机翼在后缘不远处才发生流动转捩。

图18全机气动性能
Fig.18Aerodynamic performance of design full-aircraft
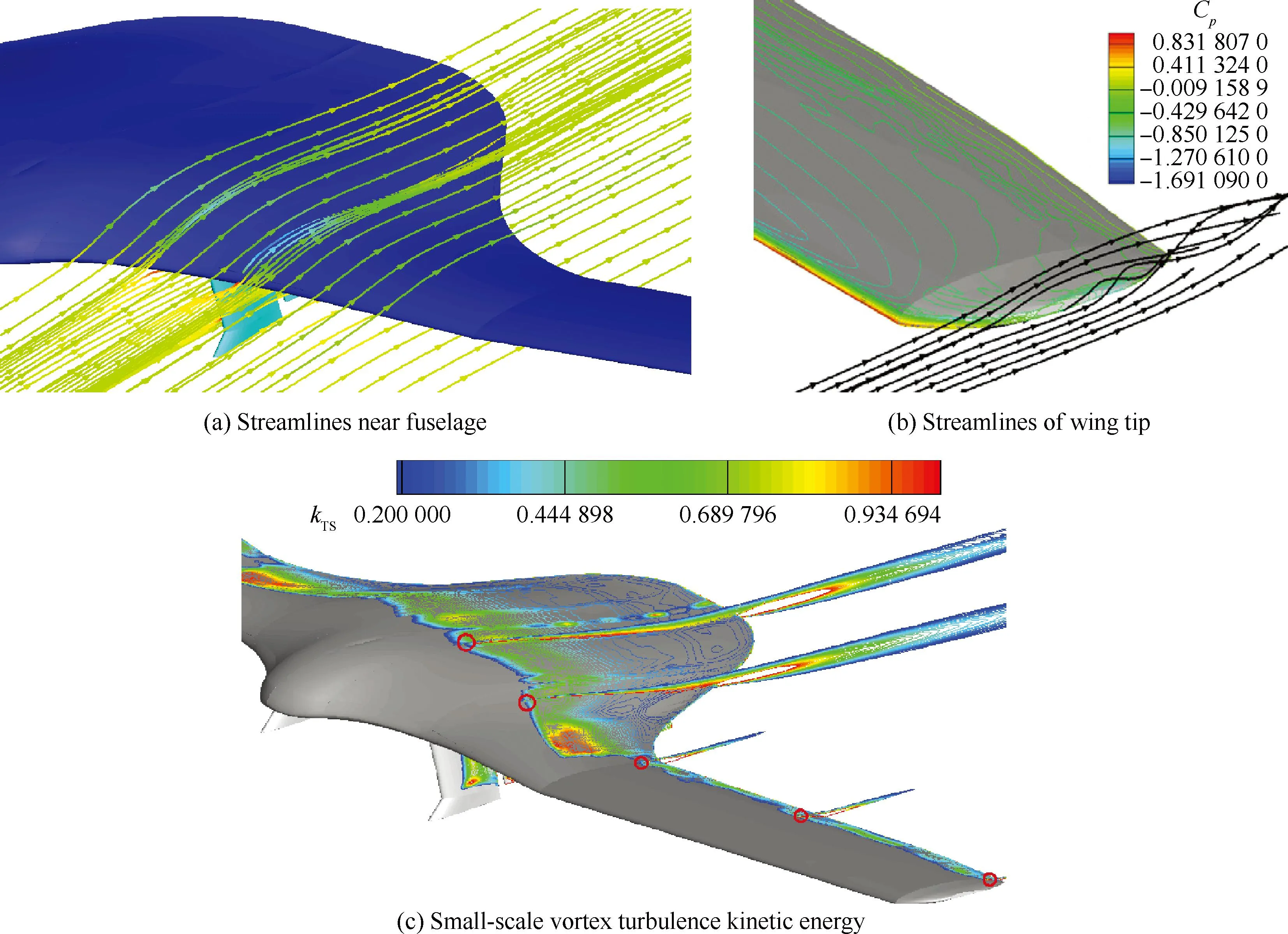
图19全机巡航状态流场 (Re =2.6×105, α=0°)
Fig.19Cruise flow field of full-aircraft (Re=2.6×105, α=0°)
为了进一步说明大迎角下气动性能下降的机理,图20给出了Re=2.6×105、α=8°全机设计构型大迎角的典型流场。由极限流线可知,流动在机翼上发生了两次分离,分别为前缘层流分离和后缘型分离;机身上流动发生了分离,并随展向流动变化形成了结点(靠近方向舵的过渡段位置处),在机翼靠近过渡段位置处流动形成了鞍点,构成了“鞍点-结点”型分离流动;体现了基本的分离流变化位置。由摩擦阻力系数分布可知,流动在前缘分离线附近发生了转捩,显然转捩位置线随展向发生了一定偏折,这是因为展向分离位置影响了流动的转捩。特别需要说明的是:大迎角时,由于雷诺数较低机翼前段为层流流态,在逆压作用下会存在层流分离,继而发生转捩和再附(再附之后,上表面的涡黏性、湍动能等湍流量以及压力梯度变化比较缓慢,流动甚至可能发生再层流化);接着,由于受下表面高压的影响,上表面后缘的逆压较大,流动将存在常见的后缘型分离,因此,表征为二次分离,这是该无人机低雷诺数下所具有的典型流动现象之一。

图20全机典型流场(Re=2.6×105, α=8°)
Fig.20Typical flow field of full-aircraft (Re=2.6×105, α=8°)
综合来看,整个设计过程需要开展不到两百个全机外形的数值模拟,计算量较小,设计效率较高;最终设计结果的气动性能较高。
3结论
1) 该仿生全翼式太阳能无人机构型是一种较新颖高效的气动布局形式,通过设计分析,极大地提高了其气动性能,得到了高效的设计推荐构型,能够为高空太阳能无人机设计提供参考。
2) 基于全机总体方案的需要,针对设计变量进行自下而上多层次的分解和自上而下的协同优化,开展仿生全翼式太阳能无人机气动分层协同设计,能够较好地提高无人机的设计效率和气动精细化分析水平,基于全机需求的分层协同设计方法是切实可行的。
参考文献
[1]BRANDT S A, GILLIAM F T. Design analysis methodology for solar-powered aircraft[J]. Journal of Aircraft, 1995, 32(4): 703-709.
[2]SELIG M S, JAMES J G, NINHAM C, et al. Summary of low-speed airfoil data: Vol.1[M]. Virginia Beach, VA: SoarTech Publications, 1995:1-117.
[3]LIAN Y S, SHYY W. Laminar-turbulent transition of a low Reynolds number rigid or flexible airfoil[J]. AIAA Journal, 2007, 44(7): 1501-1513.
[4]SWANSON T, ISAAC K M. Platform and camber effects on the aerodynamics of low-Reynolds-number wings[J]. Journal of Aircraft, 2010, 47(2): 613-621.
[5]ZHANG W, HAIN R, KäHLER C J. Scanning PIV investigation of the laminar separation bubble on a SD7003 airfoil[J]. Experiments in Fluids, 2008, 45(4): 725-743.
[6]CCUNSIL J N N, GONI B K. Low Reynolds number aerodynamic performances of the NACA 0012 and Selig-Donovan 7003 airfoils[J]. Journal of Aircraft, 2013, 50(1): 204-216.
[7]GENC S M, Ünver K, HÜSEYIN Y. Performance of transition model for predicting lowReaerofoil flows without/with single and simultaneous[J]. European Journal of Mechanics B/Fluids, 2011, 30(2): 218-235.
[8]MARCHMAN J F, ABTAHI A A. Aerodynamics of an aspect ratio 8 wing at low Reynolds number[J]. Journal of Aircraft, 1985, 22(7): 628-634.
[9]LIU H T. Unsteady aerodynamics of a Wortmann wing at low Reynolds numbers[J]. Journal of Aircraft, 1992, 29(3): 532-539.
[10]MULLER T J, DELAURIER J D. Aerodynamics of small vehicles[J]. Annual Review of Fluid Mechanics, 2003, 35: 89-110.
[11]LIAN Y S, SHYY W, VIIERU D, et al. Membrane wing aerodynamics for micro air vehicles[J]. Progress in Aerospace Science,2003,39(6):425-465.
[12]白鹏. 微型飞行器低雷诺数若干空气动力学问题研究[D]. 北京: 航天空气动力技术研究院, 2005: 1-25.
BAI P. Research on some aerodynamic problems of micro air vehicles[D]. Beijing: China Academy of Aerospace Aerodynamics, 2005: 1-25 (in Chinese).
[13]肖天航. 低雷诺数非定常流场的数值方法及其在微型飞行器上的应用[D]. 南京: 南京航空航天大学, 2009: 1-81.
XIAO T H. A Numerical method for unsteady low Reynolds number flows and application to micro air vehicles[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2009: 1-81 (in Chinese).
[14]ESMAEEL E, MEHRAN T, SAMAN N. Aerodynamic performance of Parastoo UAV[J]. Aircraft Engineering and Aerospace Technology: An International Journal, 2013, 85(2): 97-103.
[15]甘文彪. 近空间低雷诺数无人机气动数值模拟及设计研究[D]. 西安: 西北工业大学, 2014: 65-177.
GAN W B. Research on aerodynamic numerical simulation and design of near space low-Reynolds unmanned aerial vehicles [D]. Xi’an: Northwestern Polytechnical University, 2014: 65-177 (in Chinese).
[16]李沛峰, 张彬乾, 陈迎春. 基于工程的跨声速机翼两步优化设计方法[J]. 航空学报, 2011, 32(12): 2153-2162.
LI P F, ZHANG B Q, CHEN Y C. A Two-step optimization method of transonic wing design for engineering application[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(12): 2153-2162 (in Chinese).
[17]李焦赞, 高正红. 多变量气动设计问题分层协同优化[J]. 航空学报, 2013, 34(1): 58-65.
LI J Z, GAO Z H. Multivariable aerodynamic design based on multilevel collaborative optimization[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(1): 58-65 (in Chinese).
[18]CHEN Z J, QIN N, NOWAKOWSKI A F. Three-dimensional laminar-separation bubble on a cambered thin wing at low Reynolds numbers[J]. Journal of Aircraft, 2013, 50(1): 152-163.
[19]GIULIO R, GIACOMO F, ENRICO C, et al. HELIPLAT: design, aerodynamic, structural analysis of long-endurance solar-powered stratospheric platform[J]. Journal of Aircraft, 2004, 41(6): 1505-1520.
[20]NOTH A. Design of solar-powered airplanes for continuous flight[D]. Zurich: Swiss Federal Institute of Technology Zurich, 2008.
甘文彪男, 博士, 讲师。主要研究方向: 飞行器总体气动设计与计算流体力学。
Tel: 010-82317395
E-mail: ganhope@buaa.edu.cn
周洲女, 博士, 教授, 博士生导师。主要研究方向: 飞行器总体、气动设计。
Tel: 029-88453368
E-mail: zhouzhou@nwpu.edu.cn
Received: 2014-10-30; Revised: 2014-12-23; Accepted: 2015-03-23; Published online: 2015-04-0216:02
URL: www.cnki.net/kcms/detail/11.1929.V.20150402.1602.003.html
Foundation items: The Fundamental Research Funds for the Central Universities (YWF-15-GJSYS-031); National Natural Science Foundation of China (11302178)
Multilevel collaboration design and analysis of bionic full-wing typical solar-powered unmanned aerial vehicle
GAN Wenbiao1, *, ZHOU Zhou2,XU Xiaoping2
1. Research Institute of Unmanned Aerial Vehicle, Beihang University, Beijing 100191, China 2. School of Aeronautics, Northwestern Polytechnical University, Xi’an 710072, China
Abstract:Based on “Helios” unmanned aerial vehicle (UAV) and Himalayan Vulture, a bionic full-wing typical solar-powered UAV configuration is determined. Aerodynamic multilevel collaboration design and analysis is carried out for the configuration. In the process of design and analysis, design is divided into three levels with bottom-up ideas. The first level is anti-camber low Reynolds airfoil design of inner wing to meet pitching-moment balance. The second level is outboard wing design to gain high lift. Full UAV performance design is used as the third design level. At the same time, each level uses basic optimization press based on surrogate model. Three design levels collaborate by top-down to gain design result which satisfies design index. The results show that aerodynamic multilevel collaboration design improves the design efficiency to get the excellent configuration of bionic full-wing typical solar-powered UAV and proves the feasibility of design method and the effectiveness of design result.
Key words:bionic full-wing type; solar-powered unmanned aerial vehicle; multilevel collaboration optimization; aerodynamic design; performance analysis
*Corresponding author. Tel.: 010-82317395E-mail: ganhope@buaa.edu.cn
作者简介:
中图分类号:V221+.3
文献标识码:A
文章编号:1000-6893(2016)01-0163-16
DOI:10.7527/S1000-6893.2015.0081
*通讯作者.Tel.: 010-82317395E-mail: ganhope@buaa.edu.cn
基金项目:中央高校基本科研业务费专项资金 (YWF-15-GJSYS-031); 国家自然科学基金 (11302178)
收稿日期:2014-10-30; 退修日期: 2014-12-23; 录用日期: 2015-03-23; 网络出版时间: 2015-04-0216:02
网络出版地址: www.cnki.net/kcms/detail/11.1929.V.20150402.1602.003.html
引用格式: 甘文彪, 周洲, 许晓平. 仿生全翼式太阳能无人机分层协同设计及分析[J]. 航空学报, 2016, 37(1): 163-178. GAN W B, ZHOU Z, XU X P.Multilevel collaboration design and analysis of bionic full-wing typical solar-powered unmanned aerial vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(1): 163-178.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
猜你喜欢
大陆桥视野·下(2016年11期)2017-02-28
考试周刊(2017年7期)2017-02-06
科教导刊·电子版(2016年26期)2016-11-21
科教导刊·电子版(2016年25期)2016-11-16
无线互联科技(2015年22期)2016-03-07
科技视界(2016年4期)2016-02-22
科技资讯(2015年7期)2015-07-02
科技与创新(2015年4期)2015-03-31
电子技术与软件工程(2014年18期)2014-11-05