太阳能/氢能无人机总体设计与能源管理策略研究
2016-05-05 07:02:48刘莉杜孟尧张晓辉张超徐广通王正平
航空学报 2016年1期
刘莉, 杜孟尧, 张晓辉, 张超, 徐广通, 王正平
北京理工大学 宇航学院, 北京 100081
太阳能/氢能无人机总体设计与能源管理策略研究
刘莉*, 杜孟尧, 张晓辉, 张超, 徐广通, 王正平
北京理工大学 宇航学院, 北京100081
摘要:针对小型低空长航时电动无人机需求,给出了太阳能/氢能混合能源动力系统集成方案和小型低空长航时无人机构型。针对典型任务剖面,综合考虑太阳能电池和氢燃料电池特性,提出了一种考虑全机重量能量耦合关系的总体设计方法和任务剖面驱动的能源管理策略;建立了能源系统模型,给出了能源控制流程,开发了能源管理仿真平台。以1.5 kg任务载荷为例,完成了无人机总体方案设计,仿真分析了各种能源特性对飞行结果的影响。结果表明:能源管理策略能够根据任务剖面的要求合理配置能源系统的功率,满足各阶段的功率需求;无人机在冬至日航时为21 h、夏至日可实现跨昼夜飞行;在能源系统重量相同情况下,该混合能源无人机的航时分别是纯锂电池无人机和燃料电池无人机的5.5倍和1.2倍。
关键词:太阳能; 氢能; 长航时; 电动无人机; 总体设计; 能源管理
电力驱动无人机与传统油动无人机相比振动小、声热信号特征低、隐身性能优异,启动、操作和维护都较为简单,且零排放、无污染,可为有效载荷提供较为稳定的搭载平台。军事上适用于执行军事侦察、监视和巡逻等任务,民事上适用于航拍测绘、环境监测、交通监控以及科研活动等,已经成为国内外研究的热点。
目前采用传统蓄电池的电动无人机相对于油动无人机最大的缺点是续航时间有限、载荷量低,因而导致该类无人机的应用受到限制。随着新型能源如太阳能电池、燃料电池的发展,以及航空蓄电池能量密度的不断提高,长航时甚至超长航时电动无人机成为了可能。根据所使用能源的不同,长航时电动无人机的发展主要集中在以下两个方向:太阳能无人机和燃料电池无人机。
太阳能无人机以太阳辐射作为能量来源[1],通过太阳能电池将太阳能转换为电能,配合储能蓄电池驱动电机和螺旋桨为无人机提供动力。由于平流层具有更加理想的光照、温度和气流条件,太阳能无人机更倾向于向高空发展。作为太阳能电池无人机的范例,由美国研制的太阳能无人机“太阳神”曾在2011年创造了30.5 km的飞行高度记录,并且实现了20 h的连续飞行[2]。该类无人机通常需采用超大展弦比轻质结构,减小结构重量[3-4]。其总体设计比传统飞机设计更复杂,存在重量与能量之间的耦合关系[5],设计过程要以能量为核心[4],建立供能关系、升力与重力的关系。尺寸大、翼载小、载荷低、超大展弦比和结构轻等特点使得太阳能无人机结构较弱,气动弹性问题严重,影响飞机的操控性、稳定性和安全性。
燃料电池无人机采用氢燃料作为能源,将氢气的化学能转化为电能为无人机电动力系统提供功率。航空用燃料电池具有转换效率高、功重比高、能量密度大等特点[6-7],因此,无人机的结构可以更强,翼载可以更大,降低了长航时电动无人机的设计难度。配合蓄电池弥补其动态特性差、瞬时输出功率小的问题[8-9],使电动无人机具有更强的机动性,适应中低空的环境。作为燃料电池无人机成功的范例,由美国海军研究实验室研制的氢燃料电池无人机“离子虎”号,成功地完成了26 h的飞行试验。但与传统油动无人机类似,燃料电池无人机航时也要受限于其携带的氢燃料。
为了追求更长的航时,人们也在尝试太阳能与燃料电池相结合的途径。如美国在太阳能无人机的基础上加装燃料电池(太阳神3),以解决蓄电池能量密度低的问题,结果由于高翼载荷下遇到湍流而引起大柔性机翼结构失效而坠毁[10]。美国伊利诺理工大学提出了太阳能/氢能混合的方案[11],通过仿真说明了理论上的可行性。韩国宇航研究院在燃料电池无人机的基础上,增加了太阳能电池,完成了22.13 h连续飞行试验[12-14],证明了低空太阳能/氢能混合电动无人机方案的可行性。但是其重点在于混合电推进系统的管理,且没有考虑推进系统与无人机平台以及飞行剖面的耦合关系,欠缺太阳能/氢能混合无人机的总体设计方法研究。
本文的目的是针对小型低空电动无人机的长航时问题,研究太阳能/氢能混合能源方案。根据典型的任务剖面,综合考虑太阳能电池和氢燃料电池的特点,开展太阳能/氢能混合能源无人机总体设计与能源管理策略研究。
1无人机能源动力系统与总体构型确定
1.1典型任务剖面
针对低空小型无人机的应用需求,选取了如图 1 所示的典型任务剖面,共由6个阶段组成:
1) 起飞段,由静止开始加速滑跑至起飞速度vr开始爬升,达到正常爬升速度vc。
2) 爬升段,迎角α、爬升速度vc不变,定常直线爬升至巡航高度h。
3) 巡航段,在预定巡航高度h保持定常水平飞行,迎角α、巡航速度v保持不变。
4) 滑翔下降段,剩余能量达到最低许用值后转入滑翔下降状态,以巡航速度v无动力飞行,降低至安全高度hs。
5) 飘落减速段,改用较小的下滑角γ下滑,速度不断降低,最终转平、落地。
6) 减速滑跑段,落地后,无动力滑跑至停止。

图1无人机典型任务剖面
Fig. 1Typical UAV flight profile
1.2能源动力系统集成
解决小型低空电动无人机长航时问题,其关键在于提高整个无人机系统在当前环境下的能源利用效率,并在有限的重量范围内为无人机提供尽可能多的能量。
燃料电池能量密度相对较高,同时不受低空环境条件的限制,成为了该类无人机能源的首选方案。同时鉴于光伏技术的飞速发展(能量转化效率不断提升,成本逐渐下降),为无人机能源动力系统引入太阳能电池,以充分利用无人机已有的外露面积增加能量输入。此外,考虑到燃料电池及太阳能电池相对较低的功率密度特性,在能源动力系统中加入锂电池,以保证无人机在爬升、大机动等特殊工况下的功率输出,并作为光线良好情况下过剩太阳能的存储单元。
因此,本文选取燃料电池、太阳能电池、锂电池作为能源,同时为保证3种能源的合理运用,还需要相应的能源管理控制器(由太阳能电池最大效率点跟踪器、单双向DC/DC功率转换器及状态信息组成)。此外与其他电动无人机相似,其动力系统包含电子调速器、无刷直流电机和螺旋桨。整个能源动力系统之间的关系如图 2 所示。图中:PH为氢气储罐的压强;C为输出电流;V为输出电压;TS为燃料电池温度;I为光照强度;TE为环境温度;TM为最大功率点跟踪器温度;x为序号。

图2能源动力系统框图
Fig. 2Powertrain system diagram
1.3无人机总体构型确定
无人机的外形与结构设计会受到能源动力系统的限制。如机身需要满足容纳燃料电池堆、氢气罐的要求,机翼平面形状与翼型需要满足太阳能电池铺设的要求,等。借鉴类似的低空无人机产品,总体构型采用常规布局和气动效率较高的大展弦比机翼。并从以下两个方面综合考虑燃料电池、太阳能电池混合能源的特殊性:
1) 机翼位置采用上单翼方案,以保证机身内部的连通性;对机身容积进行详细设计,适当增加容积。以便满足装载燃料电池元件需求。
2) 采用上单翼主翼、T型尾翼布局。如此便于太阳能电池铺设,增加太阳能电池铺设面积,减小机身、垂尾的遮挡。
无人机的总体构型方案如图 3 所示。

图3无人机总体构型
Fig. 3UAV configuration
2主要总体参数计算方法
与一般的无人机设计方法不同,本文所研究的小型低空长航时无人机存在较为明显的能量重量耦合问题。对此,本文从能量平衡和重量平衡角度出发,分析各模型间的耦合关系,提出了一种考虑全机重量能量耦合关系的总体设计方法。
2.1功率匹配
根据推力、速度的计算关系,可以得到无人机的平飞需用功率为
(1)
式中:Plev为无人机巡航条件下的需用功率;F为无人机巡航状态下的发动机拉力;v为飞行速度;m为无人机起飞重量;CD为阻力系数;CL为升力系数;g为重力加速度;ρ为空气密度;S为机翼参考面积。
考虑调速器、电动机、螺旋桨相应的效率,以及机载设备的功率损耗,可以得到整机的飞行需用电功率为
(2)
式中:P为无人机巡航条件下的飞行需用电功率;Ppld为机载航空电子设备及载荷功率消耗;ηesc、ηmot、ηprpl分别为调速器、电动机、螺旋桨的效率。
2.2重量平衡
重量平衡条件要求无人机各分系统重量之和与起飞重量相等,且与升力平衡。通过分析,将无人机起飞重量分为以下3类:尺寸相关重量(机体结构、太阳能电池),功率相关重量(能源管理控制器、氢燃料电池、动力系统),能量相关重量(氢气储罐、蓄电池)。任务载荷作为设计输入。
2.2.1尺寸相关重量
机体结构重量需要参照无人机的具体制作工艺、材料进行估算。本文的混合能源小型无人机使用树脂基纤维增强复合材料,结构重量主要为复合材料壳体,根据翼面及机身的表面积、厚度及材料密度进行估算:
maf=ρmt(S1τ1+S2τ2+…+Snτn)
(3)
式中:maf为机体结构重量;ρmt为材料密度;Sn为各部分结构表面积;τn相应壳体厚度。
太阳能电池总重量通过电池阵列面积进行估算,估算公式为
msc=kscAsc
(4)
式中:msc为太阳能电池总重量;Asc为太阳能电池面积;ksc为太阳能电池面密度。
2.2.2功率相关重量
控制器中的主要部件为太阳能电池最大功率跟踪器及燃料电池电压匹配DC/DC,二者功能基本相似。用最大功率点跟踪器(Maximum Power Point Tracking,MPPT)现有产品进行估算后按照相应比例换算为能源管理控制器重量。文献[5]给出了几种不同规格的MPPT功率及重量,如图 4 所示。

图4最大功率点跟踪器(MPPT)功率-重量分布[5]
Fig. 4Power and weight distribution of MPPT[5]
通过拟合可得到MPPT及能源管理控制器重量估算公式为
(5)
式中:mMPPT、mEMS分别为MPPT和能源管理控制器重量;PMPPT, max为MPPT最大功率;ηm-MPPT为MPPT重量比率。
对于电动无人机,动力系统通常由电子调速器、电动机、减速器和螺旋桨等组成。由于动力系统包含的部件数量、种类较多,且重量分布分散,造成重量估算模型精度较低。根据动力系统比功率对系统重量进行估算,动力系统占总重的比例较小,对概念设计结果的影响不大:
mprop=kpropPlev
(6)
式中:mprop为动力系统重量;kprop为动力系统比功率。
氢燃料电池的估算方法同样基于目前可选的产品信息。使用文献[15-18]提供的数据可得到千瓦级别燃料电池产品额定功率与电堆重量分布,如图 5 所示。

图5燃料电池功率-重量分布
Fig. 5Power and weight distribution of fuel cell
根据统计数据拟合结果,采用式(7)估算相应额定功率Pfc的燃料电池重量:
mfc=0.004Pfc+1.561
(7)
式中:mfc为燃料电池重量。
2.2.3能量相关重量
衡量氢气储罐性能的指标为能量储存密度,即单位重量、单位体积所储氢气重量。根据燃料电池系统总容量可得到氢气储罐内氢气重量,再通过氢气储罐的重量储氢密度计算氢气储罐总重量:
(8)

与普通电动无人机相同,太阳能/氢能混合能源无人机采用锂聚合物电池作为蓄电池。电池重量可根据设计容量和电池能量密度计算:
(9)
式中:mbat为锂电池重量;Ebat为锂电池容量;kbat为锂电池能量密度。
以上对无人机各部分进行了重量估算。按照重量平衡的设计思路,得到重量平衡结果:
m=fsc,af(AR,b)+fEMS,fc,prop(P)+
fH-tan, bat(E)+mfixed
(10)
式中:m为无人机起飞重量;fsc,af(AR,b)为尺寸相关重量,AR为展弦比,b为翼展;fEMS,fc,prop(P)为功率相关重量;fH-tan,bat(E)为能量相关重量;mfixed为任务载荷等固定重量。
2.3能量平衡
能量平衡,是指在整个飞行包线中的能量消耗总量与太阳能电池、氢燃料电池、锂电池三者提供的总能量相等。
日间,太阳能电池阵列将获得的太阳能按照一定的比例转换为电能,向动力系统提供能量的同时将部分剩余能量储存在锂电池中。通过对太阳光照模型的分析发现,太阳光照强度基本随时间按照正弦形式变化:
(11)
式中:Imax为最大光照强度;Tday为光照时间;tr为日出时刻作起点的计算时刻。
无人机使用太阳能电池阵列、太阳能电池MPPT对太阳能光照能量进行转换。其中,太阳能电池具有特定的能量转化效率,同时还需考虑由于机翼上表面的弯曲特性造成的部分能量损失及MPPT的跟踪算法的效率损失。此外在低空环境下尤其需要考虑环境的影响情况。
综合以上诸多因素,最终可以得到太阳能电池系统实时功率输出结果:
(12)
式中:ηwthr为天气影响因数;ηsc为太阳能电池能量转化效率;ηcl为翼型曲面引起效率损失的输出效率;ηmppt为MPPT能量输出效率;ηarea为太阳能电池阵列铺设比率。
锂电池设计容量主要由爬升高度、爬升需求功率确定。由于在起飞、爬升过程中的功率需求大大增加,造成单纯依靠太阳能电池、燃料电池无法满足功率要求,需要借助锂电池作为备用能源,保证无人机正常爬升至设计飞行高度:
(13)
式中:t1为爬升起始时刻;t2为爬升结束时刻;ηdchrg为锂电池放电效率;Pclimb为爬升需用功率。
作为无人机的主要能量来源,燃料电池总能量对于航时具有决定性影响。该部分能量还需考虑燃料电池系统效率等因素的作用:
Efc=mHDHηH-tanηfc
(14)
式中:Efc为燃料电池系统总容量。
按照能量分配情况分析,无人机所有的能量均来源于太阳能电池、燃料电池。其中锂电池在充放过程中会造成一定的效率损失:
(15)
式中:Esc为太阳能电池的能量;ηchrg、ηdchrg为锂电池充放电过程的能量利用效率;Tall为全部飞行时间。可见锂电池充放过程造成了一定的能量损失,且重放次数n越多,能量损失越大。
2.4耦合设计方法
根据无人机巡航飞行状态下重量平衡、能量平衡设计原则,建立平衡方程:
(16)
其中,无人机需用功率需要按照功重匹配的思路,根据气动特性与起飞重量等参数进行计算。将功率匹配分析、重量平衡分析、能量平衡分析中的式(1)~式(10)、式(11)~式(15)代入式(16),可以得到重量平衡方程为
m=fsc,af(AR,b)+fEMS,fc,prop(P(m))+
fH-tan,bat(E(P(m)))+mfixed
(17)
通过对式(17)的求解,则可得到相应展弦比、翼展、任务载荷等设计参数对应的起飞重量和设计结果。
3混合能源管理策略研究
考虑到多种能源的功率特性直接与任务剖面相关,本文提出了任务剖面驱动的能量管理策略。起飞段和爬升段需用功率较大,单种电源无法满足需求功率要求,故采用太阳能+燃料电池+锂电池输出模式。巡航段优先使用太阳能电池,在光照条件不满足要求时使用燃料电池作为主要能源,全过程中锂电池作为辅助能源使用。滑翔段、减速段以及着陆段,太阳能电池、燃料电池、锂电池根据电量任意组合。
3.1约束条件
能源管理策略嵌入在能源管理控制器中用于控制能源的输出和功率分配。根据动力系统需求信息和能源系统的状态信息,控制各电源的关闭和启动,调节各电源输出的电压,从而调节输出功率,以满足:
Pd+Ppld=Psc+Pbat+Pfc
(18)
式中:Pd为飞行剖面需求功率;Pbat为锂电输出功率。
考虑能源特性的约束条件如下:
1) 太阳能电池优先放电,通过MPPT太阳能电池工作在最大功率点附近,太阳能电池低于最大效率点电压不输出。
2) 燃料电池工作在效率较高的额定工作区[9],即线性的欧姆压降区,避免使用功率过低导致效率下降。
3) 锂电池配合太阳能和燃料电池用于功率变化率较大时的“削峰填谷”,放充电深度SOC=20%~90%,以防过充过放,同时受充放电倍率限制。
3.2能源控制流程
图6为根据以上能源管理策略给出的能源控制流程。图中,t为当前时刻,Δh为离散时间步长,Iavailable为太阳能电池可用的最小需求太阳辅照度,Pd1为除太阳能电池外的剩余需求功率,Pd2为除太阳能和锂电池的剩余需求功率,SOC为锂电池的当前剩余电量,PLi为锂电池的当前可用功率,SOCL为锂电池可用最低剩余电量,PLmax为锂电池可输出的最大功率,SOCH为锂电池可充电的最高剩余电量,PS为太阳能电池实际输出功率,PL为锂电池实际输出功率,PF为燃料电池实际输出功率,SOP为当前氢气压强,SOPL为可用最低氢气压强,PFmax为燃料电池的最大输出功率,PFmin为燃料电池的最小输出功率,小于此功率转换效率低,PFrated为燃料电池的额定输出功率,ΔPF和ΔPL为仅供降落过程的燃料电池和锂电池的输出功率。具体步骤如下:
步骤 1 系统参数初始化,进行无人机飞行条件和能源系统参数初始化,包括起飞时间、经纬度、航向、锂电池电量、氢气压强等初始化信息。
步骤 2更新控制系统时间,进行下一周期控制,更新时间步长为Δh。
步骤 3总需求功率计算,接收动力系统和航电设备需求功率信息,计算总的需求功率PD=Pd+Ppld。
步骤 4检测各能源状态,包括太阳光照强度、锂电池当前电量、储氢瓶当前压强。
步骤 5太阳能电池状态判定,根据当前光照强度判断太阳能电池是否可用,若可用则优先输出,并计算剩余需求功率Pd1,若不可用则发出太阳能电池不可用警报。
步骤 6锂电池充放电决策,根据剩余需求功率Pd1判断太阳能电池是否满足需求功率,并根据锂电池状态确定锂电池的充放电功率;如果满足总需求功率则返回步骤2,反之,进入步骤7。
步骤 7燃料电池和锂电池功率分配,根据燃料电池的当前储氢压强,锂电池的可用输出功率、剩余需求功率Pd2以及燃料电池的高效点功率,确定燃料电池和锂电池的输出功率,并判断巡航能源是否耗尽,以确定进入降落阶段。最后,返回步骤2。

图6能源管理策略流程
Fig. 6Flowchart of energy management strategy
3.3能源动力系统建模及校验
1) 太阳辐照度
晴朗天气的太阳辐照度模型可采用Bird和Hulstron提出的经验公式模型[19],其基本形式为
Q=SolarIrradiation(Day,td,ψ,H,α,β)
(19)
式中:Q为太阳能电池平板受到的光照强度;Day为从1月1日起的日序;td为24小时制第td小时;ψ为地理纬度;H为海拔高度;α为太阳能电池平板与水平面之间夹角;β为飞机航向。
为了校验模型,采用光强计随机选择一年的第41天进行全天太阳辐照监测,如图 7 所示。每隔1 h记录1次数据。采用试验数据,进行最大光照强度点修正,修正后的理论值与试验结果对比如图 8 所示。各倾斜角度下的试验数据与模型数据基本吻合,最大误差为3.3%。

图7太阳辐照度测量试验
Fig. 7Solar irradiation measurement test

图8试验与模型数据对比
Fig. 8Comparison of measurement and model data
2) 太阳能电池阵
考虑太阳能电池模型的实用性,本文根据一般太阳能电池生厂商提供的性能参数,将理论模型进行了适当的简化和变换,并引入相应的补偿系数建立太阳能电池工程模型,得到太阳能电池在不同辐照度、不同温度下的伏安特性:
(20)
式中:Isc为短路电流;Voc为开路电压;Im为最大功率点电流;Vm为最大功率点电压。当光强或温度变化时,通过引入相应的补偿系数,可通过式(21)近似推算出任意光强S和电池温度T下的输出I-V特性曲线:
(21)

模型校验采用中国国电集团高效柔性GaAs太阳能电池。试验场景和数据对比结果如图9所示。图中,Usc为太阳能电池输出电压。可见模型基本与试验数据吻合,起伏波动误差主要由光照强度波动造成。

图9太阳能电池试验与模型校验
Fig. 9Solar cell test and model verification
3) 质子交换膜燃料电池
质子交换膜燃料电池(PEMFC)模型主要分为两部分:燃料电堆模型和碳纤维高压储氢瓶模型。
燃料电池单电池采用半经验公式模型:
Vcell=ENernst-Vact-Vohm-Vcon
(22)
式中:Vcell为燃料电池单片电压;ENernst为开路电压或耐斯特(Nernst)电压;Vact为极化压降;Vohm为欧姆压降;Vcon为浓差压降。3种压降的表达式为
(23)
式中:v0和va为关于氧气的分压和温度的函数;c1、c2、c3为常数;i和imax分别为通过燃料电池片的电流面密度和最大电流面密度;Rohm为燃料电池内阻。燃料电堆模型为
Vst=NVcell
(24)
式中:N为串联电池的片数;Vst为燃料电池输出电压。
试验所采用的燃料电池为上海攀业氢能源科技有限公司提供的EOS300燃料电池(额定功率300 W,额定电压为16.8 V,转换效率≥50%,总质量为2.8 kg)。试验所采用的主要设备如图10所示。
试验结果与理论模型对比结果如图 11所示。图11(a) 中,Ifc为燃料电池输出电流;Ufc为燃料电池输出电压。模型最大偏差为7%,平均偏差为0.9%,伏安特性中I<5 A时误差较大,是由于燃料电池闲置时间较长导致的极化段压降增加所致。

图10燃料电池及主要试验设备
Fig. 10Fuel cell and main test equipment

图11燃料电池模型校验
Fig. 11Fuel cell model verification
4) 锂电池
锂电池采用Thevenin等效电路模型[20],其数学模型为
(25)
式中:UOC为开路电压;Ro为欧姆内阻;IL为总电流;IP为通过极化内阻的电流;UL为电池负载电压;RP和CP分别为极化内阻和极化电容;SOC0为锂电池初始剩余电量。
为验证仿真模型的正确性,进行了仿真模型与实测数据的对比。对锂电池不同工况下的输出情况进行了数据采集。在仿真平台中,赋予锂电池模型相同条件,进行了相同过程的数值仿真。对比试验过程及结果如图 12 所示。

图12锂电池模型校验
Fig. 12Lithium battery model verification
可见模型与试验结果基本吻合,误差随迭代步数(时间)会稍有增大,但小于2%,通过减小迭代步长可以减小误差。
5) 动力模型
动力由无刷直流电机和螺旋桨提供。电动机采用无刷直流电机,其功率、效率以及转速模型为
(26)
式中:Im为输入电流;Vm为输入电压;Rm为电动机内阻;I0为空载电流;KV为电动机速度常数。Rm、I0和KV这3个参数由电动机生产厂商给出。
螺旋桨主要采用动量理论建立效率模型,可表示为
(27)
式中:T为螺旋桨拉力;V0为来流周向速度;ρ来流密度;A为桨盘面积;a为桨盘诱导因子;k为比例系数,一般取0.8~0.9。电子调速器效率一般为定值,可取97%。
3.4能源管理系统仿真平台开发
为了分析本文提出的能源管理策略与控制流程的效能,开发了能源管理系统仿真平台。平台包括5个模块:用户管理模块、工程管理模块、前处理模块、仿真管理模块和后处理模块。
软件基本构架和组成如图 13 所示,操作主界面如图 14 所示。仿真过程中可实时显示无人机的飞行剖面,3种电池的输出功率,太阳能电池可用功率,锂电池荷电状态和氢气的剩余压强等参数信息,如图 15 所示。仿真完成后可在仿真结果中显示所需的参数(包括无人机飞行剖面参数、能源状态参数等),仿真数据结果可保存在Excel数据表中。
4总体方案设计与仿真分析
4.1设计条件
结合当前各能源特性,选取设计任务载荷为1.5 kg,所选3种能源的特性参数如表 1 所示。

图13系统软件基本架构和组成
Fig. 13Basic frame and constitude of system software

图14仿真平台主界面
Fig. 14Interface of simulation demo platform

图15仿真过程中的参数变化
Fig. 15Variation of parameters in simulation process
表1能源系统参数
Table 1Parameters of energy system

PowersourceParameterValueSolarcellEfficiency/%20Mass/kg0.74FuelcellMinpower/W100Ratedpower/W300Maxpower/W360Fuelcellstackmass/kg3h1andtankmass/kg2.8h1massratiototankwithh1/%12LibatteryEnergydensity/(Wh·kg-1)136Seriesnumber5SOCintervalofcharge0.2-0.9InitialSOC1.0
4.2总体方案设计
采用本文的设计方法,选择展弦比、翼展作为设计参数,对混合动力小型无人机进行了初步设计。如图 16 所示,模型计算结果表明,在当前条件下对于同样的任务载荷而言,无人机平飞需用功率随展弦比的增加不断降低;而在展弦比不变时,则存在某一翼展,使得无人机需用功率取得最小值。

图16功率与翼展、展弦比关系
Fig. 16Relationship between power and wingspan &
aspect ratio
综合考虑展弦比的影响情况,以及结构强度、太阳能电池尺寸和铺设条件等要求,选取设计弦长为250 mm、翼展为3 560 mm。使用该方案,可在主翼铺设48片太阳能电池,电池面积比例为84%,如图17(a)所示。
副翼作为活动舵面,会对太阳能电池的铺设带来较大影响。而若在副翼上铺设太阳能电池,则会由于副翼的偏转引起发电效率损失。针对以上问题,对机翼平面形状进行修改,如图 17 (b)所示。
为验证该方案的有效性,使用涡格法对修改前后的机翼气动特性进行了计算。结果表明,修改后的结果相应升阻比降低了3.7%;与此同时相较于之前的平直翼方案,该方案的太阳能电池增加至56片,铺设面积增加了16.7%。

图17机翼平面形状设计
Fig. 17Design of wing planform
与机翼平面形状设计相似,翼型的选择也面临气动效率和太阳能电池铺设条件、结构制造难度的矛盾。一方面希望增加翼型的弯度、减少相对厚度,改进机翼的升阻特性;另一方面则希望减小翼型的弯度、增加相对厚度,以便于太阳能电池的铺设,降低结构制造难度。
对此,参照类似的低空小型无人机,选择S1210、FX63137、E591-13%、MH114 4种翼型,使用涡格法对相应外形的气动特性进行了计算。为保证无人机的操控性能,选取最大升阻比点作为无人机盘旋工况的最大迎角,进行配平,并计算得到相应的平飞需用功率,如表 2 所示。

表2 翼型性能对比
对比发现,4种翼型所对应的平飞需用功率相差在7%以内,对整机的航时影响不大。翼型厚度均在14%左右,除S1210翼型后缘弯度较大、厚度较小以外,其他翼型基本均可满足结构加工要求。太阳能电池铺设的可行性主要取决于铺设区域的最小曲率半径,该值越小对太阳能电池的柔性要求越高,且对太阳能电池能量转化效率的影响越大。从其余三种翼型中进行进一步筛选,使用MH114作为最终方案,其曲率半径最大,为55 mm(弦长250 mm)。
经过上述机翼、尾翼等尺寸的详细设计,最终得到了整机的设计方案。经气动计算与配平分析,确定了无人机的巡航速度、迎角及平尾安装角。无人机关键参数如表3所示。

表3 无人机关键参数
4.3仿真与分析
根据1.1节中的任务剖面,结合设计的总体方案,给出无人机任务剖面各个阶段的关键参数如表 4 所示,除了各阶段飞行所需要的电功率外,还需要额外的航电设备功率Ppld=20 W。
4.3.1飞行结果分析
设定起飞日期为夏至日,时间为早上9:00,由北纬40°向南飞行,地面温度为30 ℃。按照给定条件,无人机的最大航时为24.3 h,飞行航迹、速度、推力和功率如图 18 所示,巡航阶段占整个飞行时间的99%,起飞和降落过程时间相对较短,因此长航时电动无人机设计时,需以巡航状态作为主要设计点。
图18(a)中,x、y分别为无人机铅垂平面内的水平飞行距离和垂直飞行高度;起飞和降落阶段的航迹和功率分配情况如图 19 所示。可见起飞过程,总需求功率为520 W,3种能源同时输出,燃料电池工作在额定功率300 W,太阳能电池可提供154 W,剩余功率由锂电池提供。减速着陆阶段,第二天的太阳已经升起完全可以提供航电所需要的20 W功率,且多余的功率给锂电池充电。

表4 任务剖面关键参数
完整飞行过程跨了一个完整的夜晚,功率分配情况如图20所示。巡航初始太阳能配合锂电池输出,燃料电池不工作,直到锂电池达到降落要求的放电深度0.3,启用燃料电池和太阳能电池配合继续输出。白天主要由太阳能为主要能源,燃料电池配合输出,太阳落山燃料电池逐渐接替太阳能电池成为主要能源,且夜间完全靠燃料电池飞行,直至第二天早上太阳升起,由于燃料电池巡航储氢耗尽,无人机进入降落程序。
从图21的能源系统状态可看出飞行过程中各个能源的状态,为了对比,进行了光照强度和剩余氢气压强的归一化处理,Qsc、Qmax分别为太阳能电池板接受的光照强度和受到的光照强度的最大值,进入降落程序后,剩余的太阳能功率很快将锂电池电量充至90%,但是作为主要能源的燃料电池已经无法继续工作,仅靠太阳能和锂电池无法在剖面高度持续飞行。
整个过程能够在各个能源系统的性能约束下,根据飞行剖面的要求,合理地配置能源系统的功率,以满足飞行的功率需求,同时能够最大限度的利用太阳能电池,获得额外的能源以增加航时。
4.3.2关键参数影响分析
1)起飞日期和时间的影响
起飞日期为夏至、春分和冬至,典型光照强度如图22所示。起飞时间从0:00~24:00间隔2 h变化, 得到不同的航时曲线如图23所示。可以看出冬至光强最弱,航时也最短正常只有21 h,春分和夏至光照时间和强度逐渐增强,航时也分别为22.6 h和24 h。
受一天光照强度变化的影响,有些时间段起飞航时也会变化。全天太阳能光照条件较好(如夏至)条件下,无人机在无日照时刻起飞,可飞行24 h以上,恰好可接受全天的光照能量;通过改变起飞时间至有日照时刻,则可延缓氢燃料耗尽时间,进而将接受太阳能辐照能量的周期延长,从而使得航时得到增加。而在光照相对较差条件下(如春分、冬至),无人机在无光照条件下起飞时无法达到24 h的航时;因此若改变起飞时间至有日照时刻,则会导致接受太阳光照时间缩短,使其飞行航时进一步减小。
2) 锂电池能量密度和储氢密度影响
以9:00作为起飞时刻,分别改变锂电池能量密度和储氢密度变化时航时基本呈线性增加,如图 24 (a)所示,锂电池储能密度由120 Wh/kg增加到320 Wh/kg,航时由24.2 h增加到26.2 h,表明锂电池能量密度增加83%,航时只增加8%,主要是因为锂电池的重量占混合能源系统的比重较小只有4.4%,只增加了60 Wh。

图18飞行过程信息
Fig. 18Information of flight process
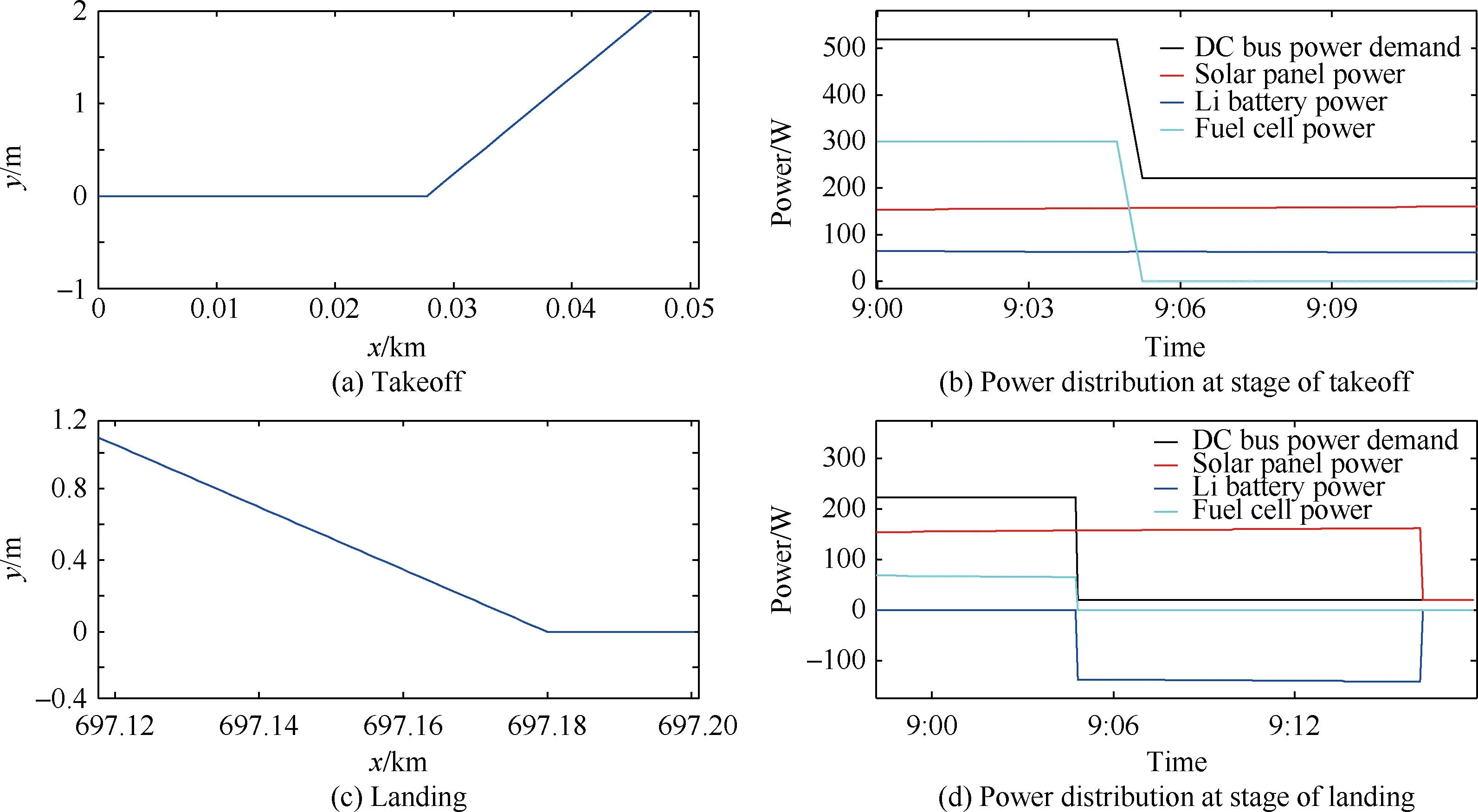
图19起飞降落过程中航迹与功率分配情况
Fig. 19Power distribution & flight track in takeoff & landing process

图20飞行过程中各能源输出功率情况
Fig. 20Power outputs of energy sources in flight process

图21飞行过程中的能源状态
Fig. 21State of energy system in flight process

图22冬至、春分和夏至的光照强度
Fig. 22Solar irradiance on winter solstice, spring
equinox and summer solstice

图23冬至、春分和夏至不同时刻起飞的航时
Fig. 23Endurance according to different time on winter solstice, spring equinox and summer sulstice

图24能量和储氢密度对航时的影响
Fig. 24Influence of energy and H2density on endurance
图24(b)显示储氢质量百分比由2%提高到20%,航时由8.4 h增加到46.7 h,表明储氢质量百分比每增加1个百分点,航时可提高2 h。
3) 太阳能电池效率的影响
太阳能电池效率的提高使得太阳能电池可以更早更长时间的工作,从而提高无人机的航时,如图 25 所示。其中,效率达由21%到24%,航时出现陡增,是因为太阳能效率达到24%时,其最大功率能够满足巡航的需求,且有多余电量为锂电池充电,从而航时出现陡增。效率由24%提高至45%时,航时增加了5.3 h,仅提高了15%,效果并不明显,主要是受锂电池的容量和能量密度的限制,多余的太阳能很快将所携带的锂电池充满,由于飞行剖面的限制,并没有进行爬升储能,多余的太阳能的利用率逐渐减低,所以航时没有明显增加。
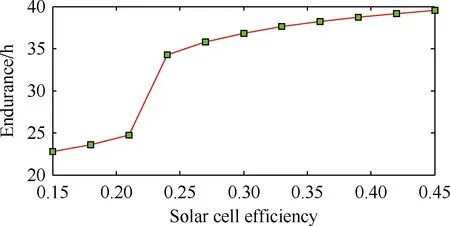
图25太阳能电池效率对航时的影响
Fig. 25Influence of solar cell efficiency on endurance
4.3.3不同能源类型的航时分析
在能源系统重量、起飞重量和飞行剖面参数相同情况下,对不同的能源类型无人机进行航时分析。其中,锂电池无人机只采用锂电池作为能源,燃料电池无人机采用了燃料电池和锂电池,混合能源无人机采用了燃料电池、锂电池和太阳能电池。能源系统重量如表5所示。
夏至日在不同时刻起飞,得到3种无人机的航时结果如图 26 所示,可见锂电池无人机和燃料电池无人机的航时不受起飞时间影响,而混合能源无人机由于太阳能电池的加入,起飞时间(光照)有一定的限制。

表5 不同无人机能源系统质量

图26不同能源类型无人机的航时比较
Fig. 26Endurance comparison of UAVs with different types of energy
对比3种能源可以看出,针对本文给出的设计方案,纯锂电池无人机航时是4.4 h,加入燃料电池后增加到20.1 h,是前者的4.6倍;采用燃料电池和太阳能电池后,航时超过24 h,是燃料电池无人机的1.2倍,是锂电池无人机的5.5倍。表明了采用本文混合能源的设计对于提高小型电动无人机航时的明显效果。
5结论
1) 综合考虑多种能源特性的基础上,给出了太阳能/氢能混合能源动力系统集成方案和太阳能/氢能小型低空长航时无人机构型。
2) 针对典型任务剖面,综合考虑太阳能电池和氢能燃料电池特性,提出了一种考虑全机重量能量耦合关系的总体设计方法和任务剖面驱动的能源管理策略。
3) 建立了能源动力系统模型,给出了能源控制流程,开发了能源管理仿真平台。
4) 以1.5 kg任务载荷为例,完成了无人机总体方案设计,并进行了仿真分析:①能源管理策略能够根据任务剖面的要求合理配置能源系统的功率,满足各阶段的功率需求;②分析给出了3种能源各自特性对飞行结果的影响;③无人机在冬至日航时为21 h、夏至日可实现跨昼夜飞行;④在能源系统重量相同情况下,该混合能源无人机的航时分别是纯锂电池无人机和燃料电池无人机的5.5倍和1.2倍。
太阳能/氢能混合能源无人机涉及的学科十分复杂,本文仅对总体设计和能源管理关键技术开展了研究,给出了初步的结论。还需要在设计中增加更多的约束条件,充分细致地考虑学科间的耦合关系。
参考文献
[1]马东立, 包文卓, 乔宇航. 利于冬季飞行的太阳能飞机构型研究[J]. 航空学报, 2014, 35(6): 1581-1591.
MA D L, BAO W Z, QIAO Y H. Study of solar-powered aircraft configuration beneficial to winter flight[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(6): 1581-1591 (in Chinese).
[2]ZHU X, GUO Z, HOU Z. Solar-powered airplanes: A historical perspective and future challenges[J]. Progress in Aerospace Sciences, 2014, 71: 36-53.
[3]邓海强, 余雄庆. 太阳能飞机的现状和发展趋势[J]. 航空科学技术, 2006(1): 28-30.
DENG H Q, YU X Q. Solar aircraft: status and directions[J]. Aeronautical Science and Technology, 2006(1): 28-30 (in Chinese).
[4]昌敏, 周洲, 郑志成. 太阳能飞机原理及总体参数敏度分析[J]. 西北工业大学学报, 2010, 28(5): 792-796.
CHANG M, ZHOU Z, ZHENG Z C. Flight principles of solar-powered airplane and sensitivity analysis of its conceptual parameters[J]. Journal of Northwestern Ploytechnical University, 2010, 28(5): 792-796 (in Chinese).
[5]NOTH A. Design of solar powered airplanes for continuous flight[D]. Zürich: ETH Zürich, 2008: 1-17.
[6]SWIDER-LYONS K E, MACKRELL J A, RODGERS J A, et al. Hydrogen fuel cell propulsion for long endurance small UAVs[C]//Proceeding of the AIAA Centennial of Naval Aviation Forum “100 Years of Achievement and Progress”. Reston: AIAA, 2011: 1-8.
[7]LTD H E S P. Aerostak data sheet[M]. 2015: 1-3.
[8]VERSTRAETE D, GONG A, LU D D C, et al. Experimental investigation of the role of the battery in the AeroStack hybrid, fuel-cell-based propulsion system for small unmanned aircraft systems[J]. International Journal of Hydrogen Energy, 2015, 40(3): 1598-1606.
[9]VERSTRAETE D, LEHMKUEHLER K, GONG A, et al. Characterisation of a hybrid, fuel-cell-based propulsion system for small unmanned aircraft[J]. Journal of Power Sources, 2014, 250: 204-211.
[10]NOLL T B J, PEREZ DAVIS M. Investigation of the Helios Prototype Aircraft Mishap[R]. Washington, D.C.: NASA, 2004.
[11]HAO C, KHALIGH A. Hybrid energy storage system for unmanned aerial vehicle (UAV)[C]//Proceeding of the IECON 2010-36th Annual Conference on IEEE Industrial Electronics Society. Piscataway, NJ: IEEE Press, 2010:2851-2856.
[12]BOHWA L, POOMIN P, KEUNBAE K. Power managements of a hybrid electric propulsion system for UAVs[J]. Journal of Mechanical Science and Technology, 2012, 26(8): 2291.
[13]BOHWA L, POOMIN P, KEUNBAE K, et al. The flight test and power simulations of an UAV powered by solar cells, a fuel cell and batteries[J]. Journal of Mechanical Science and Technology, 2014, 28(1): 399-405.
[14]BOHWA L, SEJIN K, POOMIN P, et al. Active power management system for an unmanned aerial vehicle powered by solar cells, a fuel cell, and batteries[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4): 3167-3177.
[15]LTD P H T C. EOS series data sheet[M]. 2011: 2-7.
[16]LTD P H T C. PhyX series data sheet[M]. 2011: 1-4.
[17]HERWERTH C, OFOMA U, WU D C, et al. Development of a fuel cell powered UAV for environmental research[C]//44th AIAA Aerospace Sciences Meeting and Exhibit. Reston: AIAA, 2006: 1-13.
[18]OFOMA U C, WU C C. Design of a fuel cell powered UAV for environmental research: AIAA-2004-6384[R]. Reston: AIAA, 2004.
[19]BIRD R E, HULSTRON R L. A simplified clear sky model for direct and diffuse insolation on horizontal surfaces[R]. 1981.
[20]李延平. 太阳能/氢能混合动力小型无人机总体设计[D]. 北京: 北京理工大学, 2014: 65-71.
LI Y P. Conceptual design for solar/hydrogen hybrid powered small-scale UAV[D]. Beijing: Beijing Insititute of Technology, 2014: 65-71 (in Chinese).
刘莉女, 博士, 教授。主要研究方向: 飞行器总体设计、飞行器结构分析与设计、飞行动力学与控制。
Tel: 010-68914534
E-mail: liuli@bit.edu.cn
杜孟尧男, 硕士研究生。主要研究方向: 飞行器总体设计。
Tel: 010-68913290
E-mail: 2120130043@bit.edu.cn
张晓辉男, 博士研究生。主要研究方向: 飞行器总体设计。
Tel: 010-68913290
E-mail: 3120130031@bit.edu.cn
Received: 2015-08-20; Revised: 2015-09-07; Accepted: 2015-10-12; Published online: 2015-10-2616:47
URL: www.cnki.net/kcms/detail/11.1929.V.20151026.1647.008.html
Conceptual design and energy management strategy for UAV with hybrid solar and hydrogen energy
LIU Li*, DU Mengyao, ZHANG Xiaohui, ZHANG Chao, XU Guangtong, WANG Zhengping
School of Aerospace Engineering, Beijing Institute of Technology, Beijing100081, China
Abstract:According to the long-endurance demand of small low-altitude electric UAVs, a hybrid solar and hydrogen energy system and a configuration of long-endurance small low-altitude UAV is introduced. Based on the typical flight profile and the characteristics of solar cells and fuel cells, a conceptual design method which considers the coupling relationship of weight and energy and the corresponding profile-driven energy management strategy is proposed. Energy system models are built. Furthermore, an energy control procedure is provided, and a simulation platform for hybrid energy management is developed. For an instance, a configuration scheme of the UAV with 1.5 kg payload is achieved. Based on this case, the influences of the characteristics of the energy sources on the flight results are analyzed in the process of simulation. Results prove that the strategy of energy management is able to achieve an efficient power distribution in accordance with the flight profile as well as satisfies the power requirements of all stages. The endurance of the UAV reaches 21 h on winter solstice and a whole day and whole night on summer solstice. Under the same weight of energy systems, the endurance of the proposed hybrid-powered UAV is 5.5 times of the lithium battery powered UAV and 1.2 times of solar powered UAV, respectively.
Key words:solar energy; hydrogen energy; long endurance; electric powered UAV; conceptual design; energy management
*Corresponding author. Tel.: 010-68914534E-mail: liuli@bit.edu.cn
作者简介:
中图分类号:V221.2
文献标识码:A
文章编号:1000-6893(2016)01-0144-19
DOI:10.7527/S1000-6893.2015.0273
*通讯作者.Tel.: 010-68914534E-mail: liuli@bit.edu.cn
收稿日期:2015-08-20; 退修日期: 2015-09-07; 录用日期: 2015-10-12; 网络出版时间: 2015-10-2616:47
网络出版地址: www.cnki.net/kcms/detail/11.1929.V.20151026.1647.008.html
引用格式: 刘莉, 杜孟尧, 张晓辉, 等. 太阳能/氢能无人机总体设计与能源管理策略研究[J]. 航空学报, 2016, 37(1): 144-162. LIU L, DU M Y, ZHANG X H, et al. Conceptual design and energy management strategy for UAV with hybrid solar and hydrogen energy[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(1): 144-162.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
猜你喜欢
中国石化(2022年5期)2022-06-10 06:39:30
法人(2022年5期)2022-05-23 02:30:11
小学科学(学生版)(2020年12期)2021-01-08 09:28:14
装备制造技术(2020年2期)2020-12-14 03:09:44
装备制造技术(2019年12期)2019-12-25 03:06:30
成都信息工程大学学报(2019年6期)2019-08-13 03:31:00
活力(2019年22期)2019-03-16 12:47:24
上海公路(2018年1期)2018-06-26 08:37:26
重型机械(2016年1期)2016-03-01 03:42:04
江西通信科技(2015年2期)2015-12-17 06:30:33