基于Systemvision的CAN总线物理层仿真系统
2016-05-05 01:19龚存昊段金亮余超
汽车实用技术 2016年3期
龚存昊,段金亮,余超
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
基于Systemvision的CAN总线物理层仿真系统
龚存昊,段金亮,余超
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
摘 要:随着汽车制造技术的日益成熟,由BOSCH公司提出的CAN总线已经成为了车辆领域内应用最成熟和广泛的总线技术之一。而CAN总线的物理层协议则定义了整个网络上物理数据在各个节点之间的传输过程,主要涉及到对总线电气特性等参数的设定。Systemvision作为Mentor Graphics公司开发的一款仿真软件,可以实现对整车CAN总线物理层电气特性的仿真。文章以某搭载CAN总线的车型为例,通过软件构建其物理层模型,仿真出总线电平信号。根据其结果表明,该方法可以为整车E/E架构的可靠性提供了验证手段,也同时为ECU模块后期的测试工作奠定了基础,对整车网络架构具有重要的参考价值。
关键词:CAN总线;Systemvision;ECU;网络架构
10.16638/j.cnki.1671-7988.2016.03.032
CLC NO.: U462.2 Document Code: A Article ID: 1671-7988(2016)03-94-03
前言
CAN(Controller Area Network)总线协议最早是由BOSCH公司在1986年推出其正式版,随后在1992年发布其第一款带CAN总线协议的汽车。现阶段,随着汽车制造技术的迅速发展,汽车行业逐渐体现出如下几个特点:1)通过基于平台化,可以快速的开发新产品,使得汽车更新换代速度明显增快,新产品开发周期越来越短,种类增多。2)大多数整车企业相较以往,由于汽车需要共享的信息增长迅速而ECU模块可以使得汽车本身更安全可靠,舒适度更高。所以汽车中搭载了越来越多的ECU模块。3)汽车现阶段ECU模块彼此之间交互功能日益频繁,传统的线束方式由于其成本较高,构造复杂,而采用网络总线技术可以较完美的解决该项问题,降低了成本的同时也减少了总线线束的长度和种类。
相较于目前有些整车企业使用的LIN协议和Flexray协议,由于CAN总线技术优良的成熟性,实时性和灵活性,已经成为了汽车制造领域内使用范围最广的一种总线协议。在国内外大多数的整车企业中,已经成为了主流的控制器联网方式。
1、CAN总线网络架构
在目前汽车行业科技发展和人们消费水平不断升级的大环境下,客户对于汽车的舒适度,智能化,安全性等要求不断提高,使得汽车电子电气模块的构成日益复杂,传统的线束设计和原理已经无法满足要求。随着汽车行业开发过程中模块化和平台化的逐渐完善,E/E架构已经成为了整车平台和项目规划中不可缺少的前期准备工作。其通过对整车线束设计,网络管理,路由分配,电源管理等多项内容进行配置,在满足市场调研,法律法规等的基础上,进行成本,性能,装配等多方面分析,从而获得最合适的整车电子电气系统模型。其作用相当于整车电子电气模块的总布置。
本文中研究和仿真的对象是某款搭载CAN总线的汽车,该款车型一共搭载两路CAN总线,本文以其中的车身CAN (BCAN)为例,说明其总线架构方式。车身CAN架构如图1所示。

图1 车身CAN总线网络架构
由图1可知,该款车型的车身CAN总线包含了较多的ECU模块,由于仪表(ICM),车身控制器(BCM),多媒体播放器(MP5),胎压检测(TPMS),倒车雷达(PDC),无钥匙启动(PEPS)和空调(HVAC)均搭载在该网段上,考虑到其负载率和传输速度对信号传输准确性的影响,总线采用了500Kbps/s的高速CAN(HSCAN)传输方式。该总线传输方式依据CAN BUS2.0A的11位标识符标准格式的相关技术规范和ISO11898-2协议。其网络传输通信报文格式如表1所示。
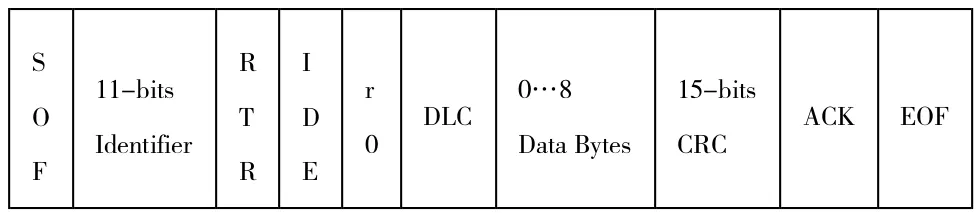
表1 CAN BUS2.0A网络传输通信报文格式
符合该传输协议的数据标准帧从SOF(Start Of Frame)起始;11位的标识符和RTR位组成了仲裁场,决定了不同报文发送的先后顺序;一般情况下报文ID值越小,发送顺序越靠前。DLC位决定报文的数据场长度,其最大数据长度为8个字节(64位);CRC场用于检查其传输是否出现错误;ACK场由ACK槽和ACK界定符组成,用于报文的正常接收。最后报文以EOF(End Of Frame)结束。
基于以上所提到的某种车型车身CAN总线的架构方式,相较于LIN总线信号的传输方式,CAN网络总线为了保证信号传输的稳定性和准确性,防止电磁干扰,采用了双绞线作为物理传输媒介。根据ISO11898-2协议所示,由于CAN总线独特的双绞线结构,CAN总线上信号的传输过程实际上是通过双绞线差分电平信号的变化来进行控制的,差分电平质量的好坏直接决定了总线上信号传输的质量。所以在协议中对其总线信号电平的幅值,斜率,位时间等电信号参数进行了明确的规定和要求。此外,ECU模块中的内部特性也同时决定了信号的电平质量和总线抗干扰能力。
2、CAN总线物理层仿真过程的实现
由于网络架构决定了不同的ECU模块在整车上的布局,考虑到CAN总线信号传递的稳定性和可靠性,架构设计者需要对CAN总线上电气特性进行仿真。
Systemvision是Mentor Graphics公司开发的一款仿真软件,可以实现与VHDL,Spice,Simulink等模块的集成,在实际软件操作中可以将不同模块的特点与自身软件相结合,发挥其最大优势。Mentor Graphics公司利用systemvision软件对最原始的ECU模块自身进行高精度抽象的仿真,将其分解为Controller(控制器),transceiver(收发器)及其它相应的元件器,其设置参数自由度大,范围广,可根据测试者针对于不同的测试环境设定其仿真参数,提高了仿真的准确性。
在本文仿真中主要利用了Systemvision与其Simulink模块的相互配合。Systemvision采用基于物理层特征的硬件模型实现其对电气特性实现控制算法的测试,并且提供具体的仿真波形和相应参数的计算;Simulink则用来快速实现其控制算法并且自动产生算法代码,从而完成最终仿真系统的搭建。通过其仿真结果得出的电平波形,配合后期相关波形参数的计算和分析,最终对其网络架构的可行性进行最终的判定。
2.1 CAN总线仿真系统构建
基于上文,本次是以一条CAN总线(以车身CAN为例)上所搭载的ECU模块作为研究对象,搭建总线物理模型,对其物理层的电平信号进行仿真。基于架构模型可以搭建成如图2所示的拓扑图。
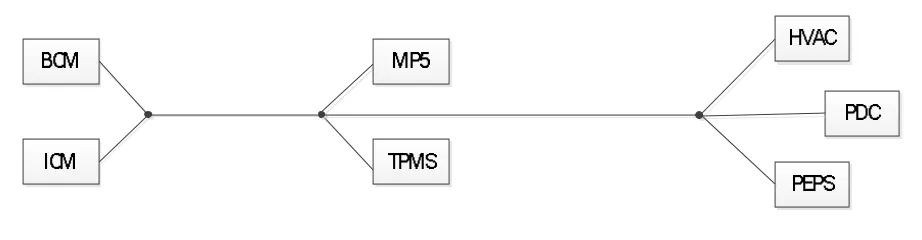
图2 BCAN的ECU模块架构拓扑图
下面详细介绍BCAN总线物理层仿真系统的建模过程:
首先,依据图2的网络拓扑结构,结合ECU模块的内部特性,在Syetemvision中利用Simulink模块建立具体总线物理层的仿真模型。参照图3所示。
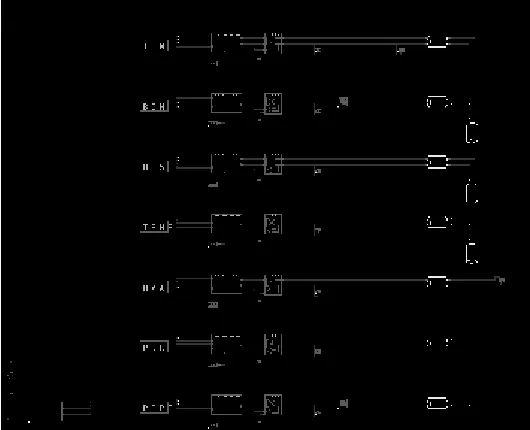
图3 CAN总线网络物理层模型
其次,需要对CAN总线网络模型中的ECU模块进行具体的内部参数设置,包括其controller(控制器),transceiver(收发器),终端电阻及其电容电感的设定。另外,为了保证仿真测试的真实性和准确性,需要完成对CAN总线线束模块长度,电阻,类型等参数的设定,具体参数设置项参照图4,图5所示。
图4 ECU模块的参数设置界面
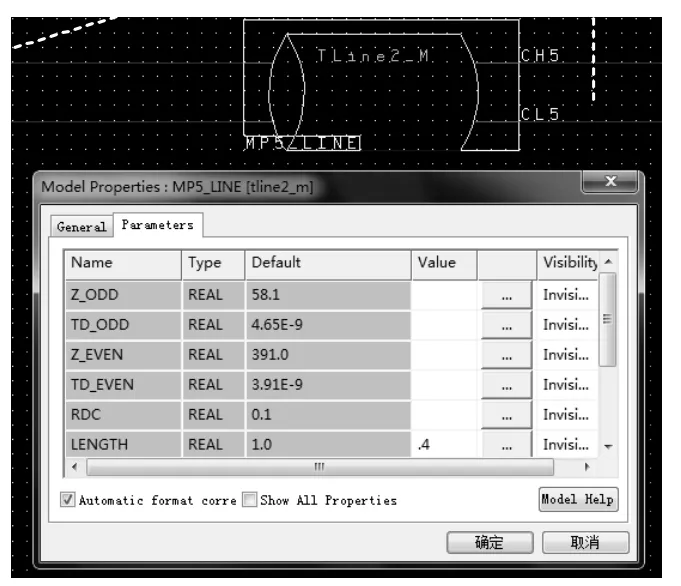
图5 线束模块参数设置界面
最终需要在Simulation中添加CAN总线上ECU模块发送的信号内容,信号周期和仿真时间等参数,从而完成最终总线物理层全部的建模过程。
2.2 仿真结果及分析
利用Systemvision软件对CAN总线物理层中ECU模块和线束模块进行了电平信号仿真,并且对仿真结果进行了分析。对于CAN总线在不同状态下的电平差分幅值和其电平上升(下降)斜率仿真结果的准确性和可靠性现阶段主要依据ISO11898-2协议进行判定。仿真结果参照图6,图7所示。
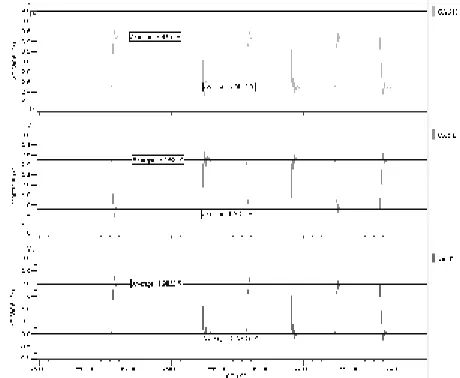
图6 CAN总线网络不同状态的电压值
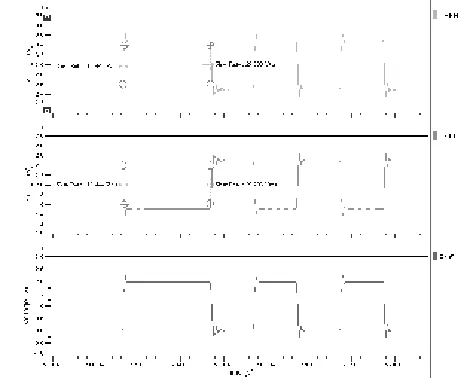
图7 CAN网络总线不同状态的电压斜率值
参照仿真波形结果,依据ISO11898-2协议对CAN总线物理层电平相关参数的设定,首先在图6中,对CAN总线在信号传输过程中不同状态下的电压值进行了仿真,由仿真结果可以发现,其总线显性状态和隐性状态下的差分电压分别为1.9V和3.2mV。在图7中,对CAN总线电平信号波形上升(下降)斜率进行了仿真,由仿真结果可以发现,CANH的上升斜率和下降斜率分别为10V/us和29V/us;CANL的上升斜率和下降斜率分别为29V/us和10V/us。
根据上述仿真波形结果分析,总线物理层的电平信号参数可以满足ISO11898-2标准,说明其网络架构方案可以保证CAN总线物理层信号传输的可靠性。
3、结束语
本文介绍了基于Syetemvision的CAN总线物理层仿真系统平台,利用其软件的SimulinK模块搭建CAN总线物理层上ECU和线束的物理模型,同时在仿真中设置了相应模块的非线性参数,使仿真结果的真实性和精确性得到了有效地提升;为整车网络架构方案提供一种新的验证途径,也同时为整车企业有效地缩短了汽车开发的周期,对汽车行业的发展有着非常现实的意义。
参考文献
[1] 郭志宏,陈虹,宋同好等.基于Syetemvision的汽车电子节气门联合仿真系统[J].系统仿真学报,011(2):280-283.
[2] 张军,基于CANoe软件的电动汽车CAN总线测试系统的研究[J].传动技术,2012(9):11-13.
[3] 刘宏波,基于CANoe的车身网络通信设计[J].机电工程技术,2012 (2):1-4.
[4] 饶云涛等,现场总线CAN原理与应用技术[M].北京:北京航天航空大学出版社,2003.
[5] BOSCH,CAN Specification Version 2.0[Z].Germany:Robert Bosch GmbH.1991.
[6] ISO 11898-2,Road vehicles-Controller area network(CAN)-part2: High-Speed medium access unit.
CAN Bus Physical Layer Simulation System Based On Systemvision
Gong Cunhao, Duan Jinliang, Yu Chao
( Anhui Jianghuai Automobile Co., Ltd., Anhui Hefei 230601 )
Abstract:With the development of vehicle manufacturing technology, the CAN bus has become the most mature and widely used technology in the vehicle field which is proposed by BOSCH.The physical layer of the CAN bus protocol defines the transmission process of the physical data in the whole network, mainly related to the setting of electrical characteristics.Systemvision is the simulation software designed by Mentor Graphics, which can achieve the physical layer of CAN bus.In this paper, through building the physical layer model by software,the bus voltage signal of vehicle is simulated.And the simulation results can provide areliablebasis for the whole vehicle E/E architecture and the upperECU module test.It has important reference value to the vehicle network architecture.
Keywords:CAN bus; Systemvision; ECU; Network Architecture
作者简介:龚存昊,硕士,就职于安徽江淮汽车股份有限公司。
中图分类号:U462.2
文献标识码:A
文章编号:1671-7988(2016)03-94-03
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车电器(2022年5期)2022-05-23
汽车实用技术(2022年4期)2022-03-07
北京航空航天大学学报(2021年9期)2021-11-02
铁道机车车辆(2021年3期)2021-07-12
科学家(2021年24期)2021-04-25
电机与控制学报(2018年9期)2018-05-14
中国新技术新产品(2017年9期)2017-04-13
中兴通讯技术(2016年3期)2016-06-22
新媒体研究(2014年11期)2014-09-01