无刷直流电机双闭环控制的仿真研究
2016-05-05 01:19凡庆许渝峰闫宽宽
汽车实用技术 2016年3期
凡庆,许渝峰,闫宽宽
(长安大学汽车学院,陕西 西安 710064)
无刷直流电机双闭环控制的仿真研究
凡庆,许渝峰,闫宽宽
(长安大学汽车学院,陕西 西安 710064)
摘 要:为了便于对无刷直流电机的运行特性和控制策略的研究,文章详细的介绍了无刷直流电机工作原理和数学模型,提出无刷直流电机的控制策略,采用电流环为内环,速度环为外环的双闭环控制,并根据数学模型搭建了Matlab/Simulink仿真模型进行仿真实验验证。仿真结果表明,整个系统运行平稳,具有良好的静、动态特性,从而验证了所提出的控制策略的正确性和有效性。
关键词:Simulink;无刷直流电机;仿真模型;双闭环控制
10.16638/j.cnki.1671-7988.2016.03.005
CLC NO.: U467.2 Document Code: A Article ID: 1671-7988(2016)03-16-04
前言
BLDCM是近年来研究人员广泛关注的一种新型电机,它用电子换相,消除了换向器和电刷组成的机械接触装置,因而维护费用低、寿命长[1]。但是由于BLDCM的控制试验时间较长,每更改一个参数就需要重新进行一次试验,这样就会导致这个控制试验费时、费力、费钱,不仅大大增加了研究成本,也给直接试验带来了困难,引入计算机仿真技术可以有效缓解上述矛盾。本文针对实际要求给出一种双闭环控制系统方法,其内环则采用电流滞环控制,外环采用速度PI控制。最后,本文在Matlab/Simulink仿真环境中搭建了无刷直流电动机的仿真模型,结合查表法法实现了电动机的梯形波感应反电动势,利用S 函数实现参考电流。仿真结果表明,BLDCM的双闭环控制系统有着良好的控制性能。
1、BLDCM运行原理及数学模型
1.1 BLDCM的工作原理
直流无刷电机系统是由电机本体、逆变器、驱动电路、位置检测器和控制器等组成的电机系统。结构上BLDCM与有刷直流电机相反:一般将电枢绕组放在定子上,把永磁体放在转子上,定子的各相绕组采用直流电源进行供电。由位置检测器检测电机的永磁转子的位置信号,控制器对转子位置信号进行逻辑处理并产生相应的开关信号,开关信号经过驱动电路功率放大,然后以一定的顺序去触发逆变器中的功率开关管,按照一定的逻辑关系导通电机定子的三相绕组,使得BLDCM在运行过程中转子产生的永久磁场和定子绕组产生的旋转磁场在空间保持在90度的电角度,从而使电机产生持续不断的转矩输出[2]。
本文以典型的三相桥式逆变器供电的Y型连接BLDCM等效电路为例,对于无刷电机的换向采用两两导通、三相六状态方式进行分析和建模。
2.2 BLDCM数学模型
BLDCM的基本物理量有电磁转矩、电枢电流、反电动势和转速等。为了获得最大的输出转矩和最小的转矩脉动,应使每相反电动势波形与该相电流波形的相位相同。由于开关管的通电周期为120度(电角度),所以每相电流的宽度也为120度(电角度),电流波形的中心位置应与反电动势波形的中心位置对应[3]。
为了简明起见,作如下假定[4]:
(1)定子齿槽的影响忽略不计;
(2)忽略电机中的磁滞和涡流损耗;
(3)电枢反应对气隙磁通的影响忽略不计;
(4)三相定子绕组在空间上完全对称,参数相同且相差120度;
(5)忽略功率器件的开关时间,其导通压降恒定,关断后等效电阻无穷大;
(6)永磁体转子的气隙磁场呈梯形波分布且定子绕组的反电势为梯形波,波顶宽度为120度(电角度)。
转子的磁阻随转子位置变化而保持不变,且绕组的互感和自感均为常数,三相绕组的电压平衡方程式可表示为:

式中:ea,eb,ec为电机定子的各相反电动势(V);
ia,ib,ic为电机定子的各相电流(A);
Ua,Ub,Uc为各相定子电压(V);
Un为中性点电压(V);
Ra,Rb,Rc为定子各相的绕组电阻(Ω);
M为各相的互感(H);
L为定子各相绕组的电感(H)。

由式(2)各行相加可得:

BLDCM的电磁转矩是由转子产生的磁场与定子绕组中的电流相互作用而产生的,从而得到电机的转矩和机械运动方程可表示为:

式中:Te为电机转矩(N.m);
Tl为负载转矩(N.m);
J为电机的转动惯量(Kg.m2);
B为阻尼系数N/(rad/s);
ω为转子的机械角速度(rad/s)。
3、基于Matlab/Simulink的BLDCM仿真平台的开发
3.1 BLDCM控制系统
电机的速度控制系统可分为开环控制和闭环控制两种。开环控制缺少反馈环节,系统的响应时间相对较慢,且稳定性和精确度不高,常用于对系统稳态精度要求不高的系统。在闭环控制中,目前来说有多种控制策略,包括PID控制、滑模变结构控制、自抗扰控制等。本文根据BLDCM控制系统简单易行要求,采用双闭环控制的策略,保证了调速系统的控制精度,从而提升系统的静态和动态性能,系统原理框图如图1所示。
3.2 BLDCM控制系统simulink仿真模型
BLDCM的反电动势为梯形波,驱动电流为方波。由于气隙磁场为梯形波分布,因此可以直接利用BLDCM本身的变量来搭建模型[6],该方法不但简单有效且准确度高。本文把系统分为各个功能独立的小模块,采用simulink模块化的设计思想,图2即为BLDCM建模的整体控制框图,图中各功能模块的结构与作用简述如下:
(1)BLDCM本体模块
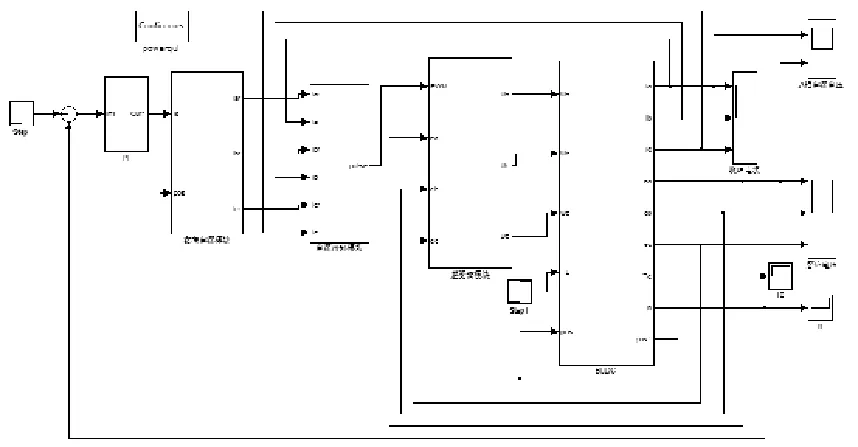
图2 BLDCM双闭环系统的Simulink仿真模型整体框图
BLDCM本体模块在整个控制系统的仿真模型中是最重要的部分,在上述分析BLDCM数学模型的基础上,根据BLDCM电压方程式(2)求取BLDCM三相相电流,然后根据转子位置和角速度信号,可求出各相反电势变化的方程,本模型利用查表法实现,最后根据电机的转矩和机械运动方程式(4)、(5)建立转矩和转速模块。
(2)电流参考模块
参考电流模块的功能可通过S函数编程实现,其作用是根据电流幅值信号IS和位置信号POS给出三相参考电流,输出的三相参考电流直接输入电流滞环控制模块。
(3)电流滞环控制模块
在这个仿真模块中采用滞环控制原理来实现电流的调节,输入为三相参考电流和三相实际电流,输出为电流滞环跟踪PWM逆变器控制信号。这种电流控制结构中有一个非线性环节—滞环,选择合适的滞环宽度,可使实测电流不断的跟踪给定电流的波形,从而实现电流的闭环控制。
(4)电压逆变器模块
逆变器根据电流滞环控制模块所控PWM信号,顺序导通和关断,产生方波电流输出,与式(3)求出电机中性点电压相减得出每项绕组的端电压。
4、仿真结果分析
本文用于研究的BLDCM的技术参数如表1:

表1 BLDCM仿真参数表
(1)恒转矩变转速仿真
在仿真中,仿真时间为0.8s,给定速度为300r/min,初始负载转矩为0N.m,在0.4时突然增加速度,使其变为600r/min,通过仿真分析控制系统的跟随性能指标(包括上升时间tr、超调量σ、调节时间ts)和抗扰性能指标(包括转速降落Δnmax和恢复时间tv),如图11所示,为两种转速下的速下的仿真波形,表2为相应的性能指标。

表2 性能指标

图3 恒转矩变转速仿真波形图
从波形图3(a)、表2可以看出系统对于转速的响应速度快,超调量较小,很快就能追踪到所给定的转速,从而得到系统具有良好的动态响应性能。由图3(b)可以发现在恒转速运行期间转矩会有毛刺,这是由于在换相阶段所导致的转矩波动,对于在0.4s转速由300r/min到600r/min的突变,转矩能在很短的时间内得到恢复稳定,从而得到系统的静态稳定性能良好。三相反电动势的波形、三相相电流波形、分别如图3(c)、图3(d)所示,从图中可以看出三相反电势为理想的梯形波,三相电流波形在转速突变是有脉动,但很快恢复稳定,这与理论分析相符合。
(2)恒转速变转矩仿真
在给定转速,突加负载的情况下进行仿真,来分析控制系统的性能。仿真时间仍为0.8s,给定速度为500r/min,在0.3s时突然增加3N.m的负载,在0.6s时又突然变为10N.m的负载,仿真结果如图4所示,通过仿真分析控制系统的跟随性能指标和抗扰性能指标。
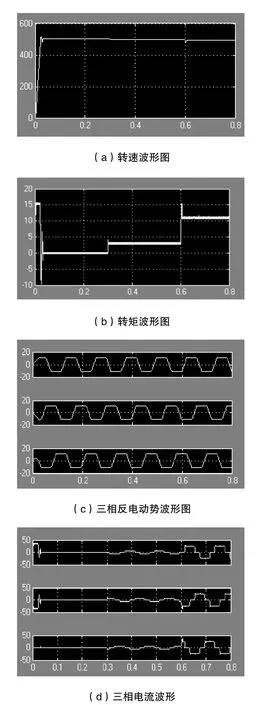
图4 恒转速变转矩仿真波形图
由图4(a)中转速波形可知,产生了较小的超调量,在0.3s和0.6s时突加负载,转速发生稍微突降,但又能迅速恢复到平衡状态,稳态运行无静差,系统稳定性较好。由图4 (b)中转矩波形和表3性能和抗干扰指标可知,可知电磁转矩能够实时的响应负载转矩的变化,同时稳定后的转矩只有微小的转矩脉动。三相反电动势和电流波形较为理想,如图4(c)、4(d)所示。以上仿真结果证明了本文所提出仿真模型的有效性。
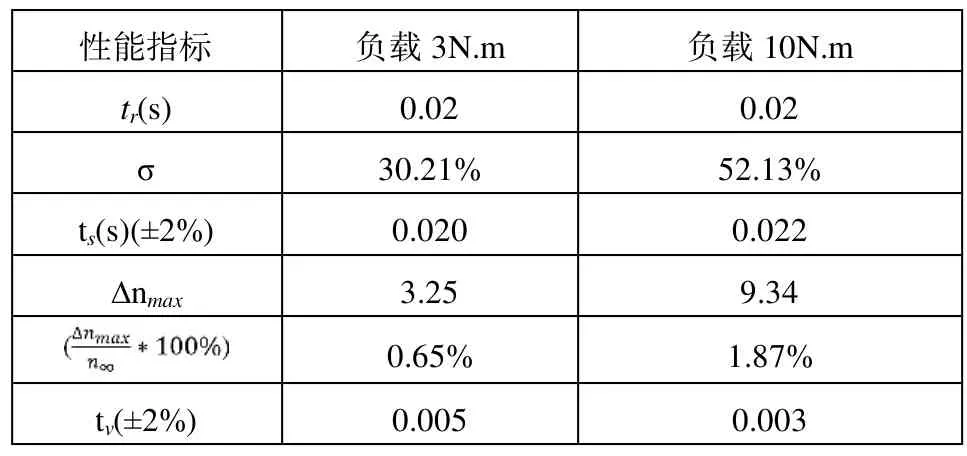
表3 性能和抗干扰指标
3、结论
通过对模型进行了仿真,得出了电机运行过程中的转速、转矩输出、三相电流波形以及反电动势波形,波形符合理论分析,系统能平稳运行,具有较好的静、动态特性,从而使BLDCM仿真平台的有效性得到了验证。该系统模型同实际试验相比,节省科研经费,减少试验时间,降低了控制系统试验的难度,加速无刷直流电动机调速系统的开发,为无刷直流电机控制系统的设计和调试提供了参考及思路。
参考文献
[1] 刘刚,王志强,房建成.永磁直流无刷电机控制技术与应用[M].北京:机械工业出版社,2008:10-55.
[2] 夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009:57-181.
[3] 祝兴良.基于直流无刷电机的电动汽车驱动系统启动过程研究[D].江苏:江苏大学,2011.
[4] 廖晖.一种无刷直流电机调制方法及驱动的研究[D].浙江:浙江大学,2012.
[5] 夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,27(3):25-34.
[6] 方炜,张辉,刘晓东.无刷直流电机双闭环控制系统的设计[J].电源学报,2014,52(2):35-42.
Study of BLDC Motor Dual-loop Control Simulation
Fan Qing, XuYufeng, Yan Kuankuan
(Automobile school of Chang'an University, Shaanxi Xi’an 710064 )
Abstract:In order to facilitate the study of operating characteristics and control strategy of BLDCM, this paper detailed introduces working principle and mathematical model of BLDCM, designed a BLDCM control strategy, using the speed of the outer loop, current loop double loop control scheme of the inner ring, and built a mathematical model based on Matlab/Simulink simulation model for verification.The simulation results show that the closed-loop system is running smoothly and has good dynamic and static characteristics, thus verified the correctness and effectiveness of the proposed control method.
Keywords:Simulink; BLDCM; Simulation model; Dual-loop control
作者简介:凡庆,硕士研究生,就读于长安大学汽车学院车辆工程专业。
中图分类号:U467.2
文献标识码:A
文章编号:1671-7988(2016)03-16-04