基于UG的小型爬壁机器人的建模与仿真
2016-05-05 01:19刘曰王林平
汽车实用技术 2016年3期
关键词:运动仿真
刘曰,王林平
(烟台大学机电汽车工程学院,山东 烟台 264000)
基于UG的小型爬壁机器人的建模与仿真
刘曰,王林平
(烟台大学机电汽车工程学院,山东 烟台 264000)
摘 要:本爬壁机器人是仿照壁虎攀爬原理设计的,依据大壁虎的生理结构设计了爬壁机器人的理论模型。为满足机器人攀爬时对吸附力的要求,按照仿生的壁虎生物体脚掌设计爬壁机器人的脚掌,材料是用聚氨酯硅的橡胶材料。依据大壁虎运动的实体模型,规划了爬壁机器人的两类运动步态,即在地平面运动的步态(对角步态)和在天花板上运动的步态(三角步态)。为验证设计方案的可行性,利用UG软件对各种运动步态进行了运动仿真,仿真结果表明,设计方案能够完成预定的动作并且具有吸附力强的特点。
关键词:爬壁机器人;步态规划;运动仿真;UG
10.16638/j.cnki.1671-7988.2016.03.018
CLC NO.: U462.1 Document Code: A Article ID: 1671-7988(2016)03-53-04
研究背景
爬壁机器人是可以在垂直壁面上工作的一类机器人,是一种能够高速运作、效率和精度非常高的自动化设施,由于其可在高空极限条件下完成作业受到人们越来越多的重视。
经过多年的发展,爬壁机器人技术已经在全球范围内有了较为广泛的应用。美国斯坦福大学研制的最新仿壁虎爬壁机器人Stickbot[1],该爬壁机器人是有四个呈对称分布的脚掌构成,每个脚掌可通过拉线机构控制内收与外翻动作,以完成机器人足端与墙体表面的吸附和脱附。
与国外机器人发展对比,我国开始研制爬壁机器人相对较晚,我国科学家经过30多年的努力,在爬壁机器人领域已开始出现一个个惊人的成绩,尤其是90年代以后,我国在爬壁机器人技术研制方面进步非常迅速。我国早期研发机器人技术的是北京航空航天机器人所宗光华教授等人研发出的“蓝天洁士”等爬壁机器人[2];北航的刘荣教授[3]在 2005 年研发的利用车轮式运动的爬壁机器人;北航于 2006 年研发出具有正压吸附功能的机器人[4]。上述机器人的吸附能力较差、体积较大等缺点。
本文提出的小型爬壁机器人在头部增加了舵机,并利用拉线结构与机器人脚掌相连,这种结构类似于机器人脚掌的“脚筋”,以帮助机器人完成脚掌的内收与外翻动作,实现与壁面的帖附、脱离。
1、机器人的结构设计
1.1 机械结构设计
依据大壁虎的生理构造,可初步建立壁虎机器人的理论模型(如下图1所示)。该仿壁虎爬壁机器人是利用四腿对称排列的方法,串联的转动关节是腿部的具体结构,机器人每个腿共有3个转动自由度。完成腿部的抬、放运动工作的电机1和其关节直接连接于机器人主体;机器人在物体表面的爬行主要由舵机2及舵机3负责完成。

图1 仿壁虎爬壁机器人的理论模型
结合大壁虎生物体构造和运动形式,可知大壁虎的四足呈现对称分布。另外,大壁虎具有柔软的躯体,它在壁面进行爬动时身体会左右扭动,所以说壁虎的躯体在运动过程中也参加了爬行,如图2所示。

图2 仿壁虎机器人的运动简图
依据对壁虎机器人研究的一般规律,然后综合其机械结构对重量要求高,机构小巧的特征,也考虑到控制方便、计算简洁,下文主要设计出了如图3所示的对称的壁虎机器人机械结构。

图3 仿壁虎机器人整体机械结构图
1.2 机器人的驱动及性能参数
仿壁虎机器人的驱动形式是机器人系统的重要组成部分之一,电气驱动是如今应用最广泛的驱动形式[5],因为它控制方便、精度高、驱动力大,可采用各种灵活的方案。该仿壁虎机器人的驱动动力源采用电机驱动,这种驱动方式相对容易,同时它的控制也相对容易完成。
其中机器人每个自由度可由一个电机来实现驱动,平行四边形结构可保证壁虎机器人在刚开始运动时自身质量尽可能聚集在其身体内部,如此以来可以把驱动电机内置,还能起到美观的效果,同时减小了每个腿部关节处相对自身的转动惯量,减小了每个舵机的驱动负载,增加了运动能力,也提升了腿部的强度。舵机和各个机构部件间的排列方式可减少各构件之间的运动干涉,使机器人足端可以向上提升的最大距离以及脚趾在运动面间的活动范围达到了最大限度。
壁虎爬壁机器人的性能和主要参数如表1、表2所示:
(1)具体技术指标

表1
(2)舵机的主要性能参数

表2
1.3 机器人的脚掌设计
仿壁虎爬壁机器人的脚掌是仿生的壁虎生物体脚掌,材料是用聚氨酯硅的橡胶材料。所制备的脚掌分级结构如下图4所示,在一级结构的末端又有无数的分支,如此实际上减小了分子间的间距,范德华力增大,保证了足端与接触表面有足够的吸附力,使机器人在爬行表面稳定运行[6]。
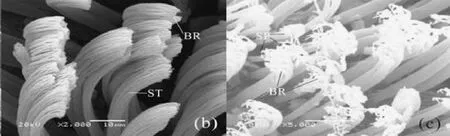
图4 壁虎足端刚毛的分级结构
由已知实验结果可得:相对符合要求的是直径大约为 30毫米的脚掌;假设四只脚趾都帖附于壁面可形成的理想范德华力为16.5N,机器人运动时,三只脚趾与壁面接触可形成的理想范德华力为 12.5N。吸附粘力是在吸附过程中刚毛进入接触表面的缝隙中形成,所以当机器人的脚趾在吸附过程时,应该尽量减少脚趾在接触表面上切向滑移,不然可能剪断刚毛,影响壁虎机器人的正常运动。所以在进行仿壁虎机器人的脚掌设计时应注意,运行构件要避免运动时位于吸附过程的支持腿与支持表面间出现沿切向的相对滑移。
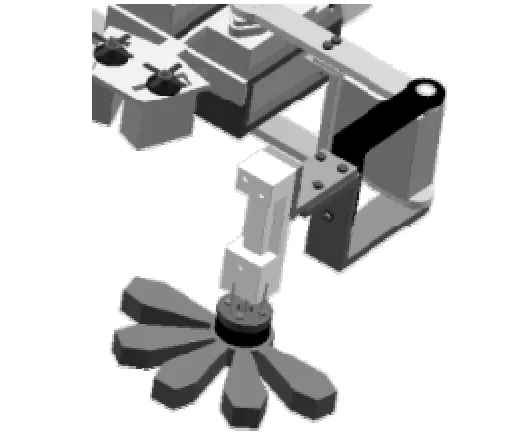
图5 壁虎机器人的脚掌模型
图5中所设计的仿壁虎机器人,在脚掌装有2 维力传感器,球铰链式的连接为足部与力传感器间的连接方式。爬壁机器人正是由力传感器感受到地面的凹凸状况,这种功能得益于具有力感知作用的仿生腿结构,把检测到的力反馈给机器人的控制中心,通过控制板块计算出所需的吸附力,由驱动模块执行,及时调节机器人的运动步态,可以迅速躲过或跨过障碍物,在墙壁面运动时拥有更强大的地面适应性。
2、机器人的步态规划
运动步态是足式机器人的走步形式,是足式机器人各条腿协调运动的一种规律,也就是每条腿的抬、放腿顺序,它是分析足式运动构件的重要参数[7]。对大壁虎在不同表面爬行的观察,可知它在壁面、天花板爬行的步态是不同的。壁虎在壁面上爬行时用两只脚同时着地,在天花板上运动时,是三只脚同时吸附在墙面上,也就是只有一只脚离地[8]。由常识可知,壁虎吸附在墙体表面上足的个数越多,壁虎所受的总吸附力就会越大。依据大壁虎运动的实体模型,下文规划了两类运动步态,即在地平面运动的步态(对角步态)和在天花板上运动的步态(三角步态)。以左前腿为例,其运动系统如图6所示。

图6 爬壁机器人左前腿运动系统图
2.1 对角步态
观察壁虎的运动规律可知,在任何时刻,壁虎在垂直壁面爬行运动中都至少有两个脚趾与壁面接触,支持和平衡身体。下图7是壁虎机器人运动时的抬、放腿顺序。由此启示可研制出该爬壁机器人在壁面运动的对角步态,在图8中关节1的抬、放腿顺序和壁虎在墙面运动是一致的。以下步态运动中,壁虎机器人本体一共向前运动了 3 次,壁虎机器人预备爬行阶段为图9-a和9-b ,一个步态周期由图9-c、9-d、9-e 共同完成。
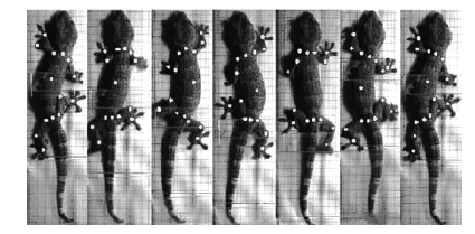
图7 壁虎在垂直面上的爬行
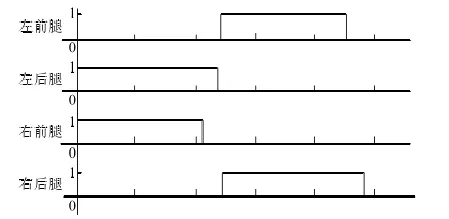
图8 壁虎机器人运动时的抬、放腿顺序
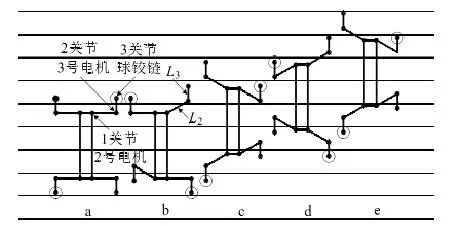
图9 壁虎机器人的对角步态
2.2 三角步态
在天花板上运动的步态中,机器人爬行时有3只脚同时接地,此时的占地系数是75%。依据理论模型壁虎机器人机构排布的特征,机器人在爬行过程前,要由最初的状态进入步态准备状态,实现一系列的准备活动。
在下图10的步态序列中,动作a、b、c是准备活动,从图d开始进行步态周期运动。在这个运动周期中,该爬壁机器人共向前运动了2次。
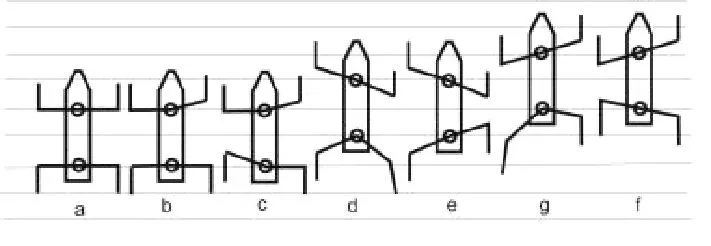
图10 壁虎机器人的三角爬行步态
3、运动仿真与分析
3.1 仿真模型建立
依据爬壁机器人的实际结构在UG软件中的运动仿真环境下建立机器人控制系统模型,如下图10所示。
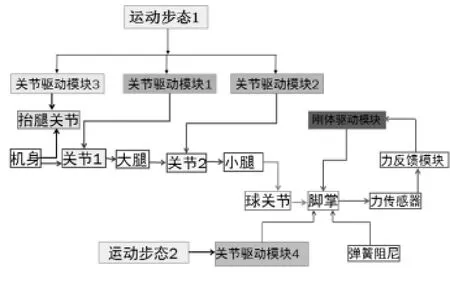
图10 爬壁机器人的整体系统图
上图10中的环境模块用来预设爬壁机器人的运动仿真环境,而其4条腿的运动模型分别安装于4个系统中,并利用2自由度的铰链结构与机架间连接。在以上内容对运动步态规划设计时,已设计了机器人运动的三角步态,利用已设计的运动步态完成天花板运动仿真,并对仿真过程进行分析,运动仿真实验结果对将来机器人在负表面爬动有非常大的指导作用。
实际仿壁虎爬壁机器人每个机构的具体的重量、尺寸大小、质心位置如下表3所示。

表3 实际仿壁虎爬壁机器人的参数
仿真模型创建后依据实际的仿壁虎爬壁机器人运动情况设置模型的运动环境,主要工作包括依据以上对动力学的分析,分析仿真机构,创建运动仿真界面。

图11 机器人运动环境设置
3.2 步态的描述
运动仿真前的 1s为机器人步态预备阶段,接着完成四个运动步态周期,其中每步态周期2s,如图12所示为爬壁机器人利用三角步态在天花板上运动图。爬壁机器人沿壁面向上运动的方式是先以加速然后减速的运动方式,如果构件可以沿预设方向稳定爬行,说明波动和偏移不存在。

图12 机器人运用三角步态在天花板爬动
3.3 运动仿真结果分析
经过 UG软件的运动仿真,如图13所示,发现了机器人在运动过程中存在着运动范围小、越障能力差的问题。对以往的机器人结构进行了改进,改变了电机2的排布位置,避免了各机构间的运动干涉,增加了脚掌的提升高度和运动范围。
图13 对机器人动画仿真
机器人需要不断地与接触壁面贴附、分离,所以在它的头部增加了电机4,该电机通过拉线结构连接于机器人脚掌,每个脚掌可通过拉线机构控制内收与外翻动作,以完成机器人足端与墙体表面的吸附和脱附。在这个爬壁机器人运动仿真模型中,壁面和单个脚掌接触面积可以接受,该仿壁虎爬壁机器人的脚掌采用的粘附矩阵需给予的粘附力达到要求。
4、结论
在壁虎机器人建模仿真的过程中,也发现了模型存在的爬行速度低、跨过障碍能力差等问题,并提出了解决问题的途径,对相应的机械结构进行改动,体现了虚拟样机技术的优势,在减小实际物理样机制造风险方面有非同寻常的作用,虚拟样机技术着实解决了仿真模拟的难题[9]。
设计的仿壁虎爬壁机器人是开环控制系统,依靠电机角度的控制完成定位,可完善脚掌力反馈系统,利用中断方式采集传感器信号。在控制系统方式上利用上位机与下位机的方法[10],其中上位机用来处理数据,而下位机负责驱动关节,以完成闭环系统精确控制。
参考文献
[1] 路甬祥.爬壁机器人技术的应用,科学中国人[J].2004,(10).
[2] 代良全.基于ADAMS的仿壁虎机器人步态规划及仿真[D].2008-06-27.
[3] 刘淑霞,王炎等.仿生学的意义与发展,机器人[J].1999,21(2):148~154.
[4] 阮鹏.基于虚拟样机技术的仿壁虎机器人步态规划及运动仿真[J].2010,22(5).
[5] 俞志伟.类壁虎机器人步态规划研究及运动控制系统研制[D].2010-06-11.
[6] 陈建敏.爬壁机器人的研究生进展[D].2007-06-02.
[7] 付宜利,李志海.一种新型爬壁机器人机构及运动学研究[J].2008, 25(4):1~5.
[8] 方晔,汪小华.仿壁虎爬壁机器人的结构及其控制系统研究[D].2009-03-10.
[9] 张培锋,王洪光等.仿壁虎机器人负表面爬行的步态规划及运动仿真[J].2007,(12).
[10] 张昊.大壁虎运动行为研究及仿壁虎机器人研制[D].2007-06-19.
The Modeling and Simulation of Small Climbing Robot Based on UG
Liu Yue, Wang Linping
( School of Mechatronics and Automobile Engineering, Yantai University, Shandong Yantai 264000 )
Abstract:This robot is designed to the simulate gecko climb principle, on the basis of large gecko the physiological structure of the theoretical model of robot is designed.To meet the requirements of climbing robot for adsorption force, in accordance with biomimetic gecko organisms sole design of robot paw, The material is made of polyurethane silicone rubber material.On the basis of large gecko's movement of the entity model, planning the gait, the two kinds of robot movement in the gait of a ground plane motion (diagonal gait) and on the ceiling movement gait gait (triangle).To test and verify the feasibility of design scheme, using UG software to all kinds of sports gait motion simulation, the simulation results show that the design scheme to accomplish the action and has the characteristics of strong adsorption force.
Keywords:climbing robot; gait planning; Kinematics; UG
作者简介:刘曰,硕士研究生,就读于烟台大学机电汽车工程学院。
中图分类号:U462.1
文献标识码:A
文章编号:1671-7988(2016)03-53-04
猜你喜欢
科技创新与应用(2017年6期)2017-03-23
山东工业技术(2017年3期)2017-03-16
教育教学论坛(2016年52期)2017-03-12
汽车科技(2016年6期)2016-12-19
科技视界(2016年17期)2016-07-15
科技视界(2016年10期)2016-04-26
现代电子技术(2015年8期)2015-07-09