
船用导航雷达收发系统的设计
2016-04-28 05:48王强,张飞
舰船电子对抗 2016年1期
王 强,张 飞
(华东电子工程研究所,合肥 230088)
船用导航雷达收发系统的设计
王强,张飞
(华东电子工程研究所,合肥 230088)
摘要:介绍了一种船用导航雷达收发系统的设计,阐述了船用导航雷达的工作原理与系统构成,论述了收发系统的设计方法和工作原理,给出了调谐控制、灵敏度时间控制、射频控制单元的电路设计。
关键词:导航雷达;收发系统;灵敏度时间控制;调谐控制
0引言
船载导航雷达作为一种传统的无线电导航设备,在船舶近海定位、引导船舶进/出港、窄航道航行以及避碰中发挥作用。国外船载导航雷达技术起步较早,技术比较成熟和全面。英国的RAYMARINE(雷松)公司,日本的JRC公司等都是全球知名的航运电子产品设备制造商。我国在船载导航雷达技术方面明显落后于国外,但是迅速发展的市场又迫切需求国内能有适用于中小型民用船舶的导航雷达产品[1]。
为满足船用设备应用需求,导航雷达应具有体积小巧、结构紧凑、操作简单、高可靠性等特点。船用雷达射频脉冲的工作波段以X波段(9 300~9 500 MHz)和S波段(2 900~3 100 MHz)为主,这2种波段的雷达通常被称为3 cm雷达和10 cm雷达[2]。在天线尺寸相同的情况下,前者具有较高的方位分辨率,有利于近距离探测;后者受雨雪杂波和海浪杂波的干扰较小,电磁波经过雨区的衰减也小,有利于远距离探测[3]。
本文论述的船用雷达选用以X波段点频9.41 GHz工作的磁控管工作模式,脉冲宽度0.07~1.2 μs,脉冲重频500~3 000 Hz。文章从系统工作原理出发,详细介绍了发射单元、接收单元以及相互之间的密切联系,对收发系统的工作原理与控制方式进行了详细描述,提供了设计思路和应用经验。
1工作原理
本设计中船用导航雷达从结构形式上简化为天线单元、信号处理与终端显示。为了小型化设计,将天线、伺服驱动、发射与接收集成于一体的天线单元,形成室外安装设备;将信号处理与终端显示一体化设计,形成室内工作设备;其相互间的连接采用长线电缆传输。
系统的电源配电位于一体化终端分机内部,通过长线电缆传输为室外的天线驱动、收发单元供电。长线电缆还传输串口通讯的控制指令与数据回馈、系统同步时序以及接收机检测到的视频信号。按照单元功能划分,系统的工作框图如图1所示。

图1 船用导航雷达系统工作框图
雷达天线通过环形器连接接收前端的射频输入和磁控管的射频输出,接收前端与中频放大构成接收单元,电源、调制器(包括高压脉冲变压器)和磁控管构成发射单元,两单元紧密结合射频控制单元共同构成了收发系统[4]。
调制器与电源为磁控管提供阴极高压、灯丝电源、脉冲调制等信号,射频控制单元通过控制调制器的触发时序控制发射机的射频输出。接收前端将接收到的60 MHz中频信号送至中频放大电路进行检测与增益控制,将处理后的中频信号经带通滤波后进行对数放大形成视频脉冲,将视频脉冲送信号处理进行检测与数据处理,作为目标检测的依据。
根据系统需求,射频控制单元对接收中频进行灵敏度时间控制(STC)与自动增益控制(AGC),为接收前端提供调谐电压,使其输出较理想的中频信号,同时该单元还与终端进行串口通讯,接受来自终端的控制指令与参数设定,如工作模式、时序控制、发射开关机控制、接收增益控制等,还可向终端送出收发系统的各种状态参数,如工作电压、电流、故障回馈等。
1.1接收单元的设计
接收单元的工作框图如图2所示。
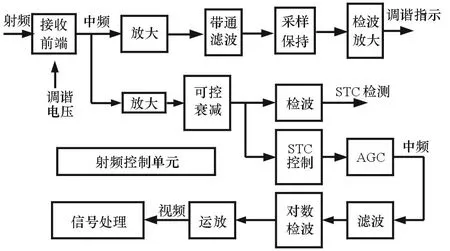
图2 接收单元工作框图
接收前端将接收的射频信号通过混频成为所需的中频,一路经信号放大、60 MHz带通滤波、采样保持以及检波放大以后,形成调谐指示信号;一路经信号放大、衰减后信号分成2路(一路经检波后形成STC检测信号,一路经STC、AGC、滤波、对数放大等形成信号处理所需的视频信号)。
射频控制单元接收调谐指示信号,向接收前端送出调谐控制电压;接收STC检测信号,向接收单元送出STC控制信号;根据系统要求实现AGC的增益控制。
1.1.1指标分析
接收机指标分解简图如图3所示。
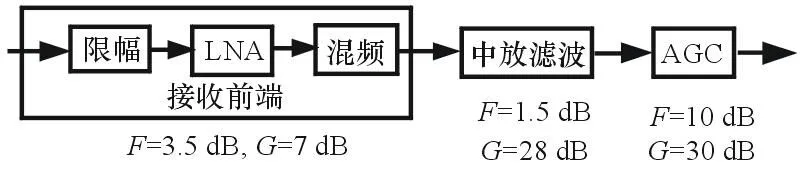
图3 接收机指标分解框图
由于接收前端采取了限幅、低噪声放大器、混频的集成设计,噪声系数为3.5 dB,增益为7 dB,中频滤波放大器噪声系数指标为1.5 dB,增益28 dB,之后的增益可控衰减电路综合噪声系数为10 dB,可控增益最大为30 dB。则由噪声系数计算公式可得:
(1)
从而得到接收机噪声系数FS=3.9 dB。
按照接收通道的灵敏度计算公式:
Smin=-114+10lgB+FS
(2)
式中:接收机信号带宽B为40 MHz,因此接收机的临界灵敏度为Smin=-94.1 dBm。
由于接收机的线性动态范围为60 dB,接收机输入端最大信号功率电平(1 dB增益压缩点)为:
1.1.2调谐控制
接收前端的内部功能框图如图4所示。

图4 接收前端内部功能框图
接收前端内部通过调谐电压控制压控振荡器(VCO)的本振频率,使混频输出的中频信号可以调整受控。
在图2中,由于接收前端输出的中频信号经过了60 MHz窄带滤波,输出的调谐指示信号电平越高表明中频信号越接近60 MHz,电平越低信号偏离越严重,需要通过调谐电压控制VCO调节。
调谐操作的启动命令、手动设定值、调谐指示信号等都采用串行数据形式在终端系统和射频控制单元之间收发传递,可以实现自动调谐或手动调谐。控制方式与调谐过程如图5所示。自动调谐即搜索与跟踪的过程,寻找在5 V和25 V之间调谐电压范围内调谐指示信号变得最大的那个调谐点。
1.1.3STC控制
雷达系统根据天线转动,带动光电转换开关形成舰首信号和方位脉冲。天线转动一圈产生一个舰首脉冲,类似于地面雷达的定北信号,方位脉冲是将天线转动一圈平均分配的多个方位扇区。

图5 调谐控制示意图
射频控制单元接收到信号处理送来的舰首和方位的同步时序信号后,依据近程STC检测信号电平计算每个扇区的平均海杂波电平,从而计算最佳的海杂波衰减曲线并产生STC控制电压的时间函数。
图6展示了通过平均海杂波电平而产生的海杂波和STC控制电压。例如,如果前面的一个强海杂波被手动STC消除了,那么在其后面的较弱的目标回波也被消除了。如果调节STC将目标回波留在后面,那么前面的海杂波信号也保留。在这种情况下,利用STC控制每个方位的海杂波差异来获得整体上的最佳画面。

图6 自动STC控制示意图
1.2发射单元设计
发射单元的工作框图如图7所示。
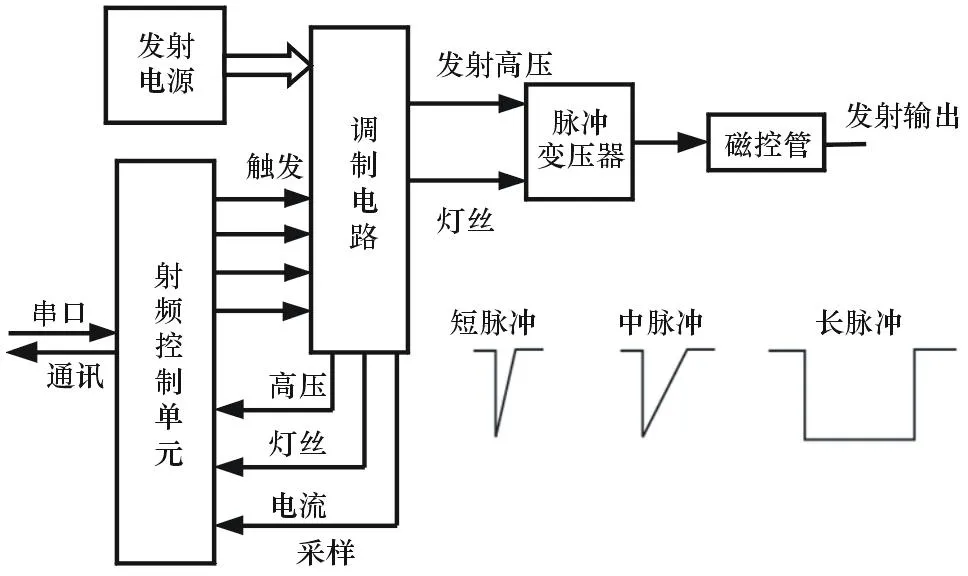
图7 发射单元工作框图
发射电源提供发射单元工作所必需的各种电源电压,如阴极高压、灯丝电源、触发驱动电压、监控电源等。发射单元的时序受控于射频控制单元送出的4路触发脉冲,这4路触发脉冲共同作用于调制电路形成发射调制脉冲,经脉冲变压器隔离升压后送给磁控管,使之输出射频功率脉冲[5]。
射频控制单元还接收发射单元送来的阴极高压、灯丝电压、磁控管电流等模拟检测信号,经模/数转换后将检测到的数据通过串口上传终端上位机。雷达系统对发射机的工作参数进行设置,如重复周期、工作脉宽设定以及发射机开启或关闭等控制都是通过串口控制的。射频控制单元依据系统送来的同步时序及工作参数的设定产生并输出相应的触发脉冲[6]。
依据雷达的应用需求,发射脉冲分短脉冲、中脉冲和长脉冲,发射短脉冲和中脉冲的波形为三角形波。进行信号处理时,它可以抑制如海杂波这样相对弱的近程回波。图8给出了实测发射输出所检测到的波形。
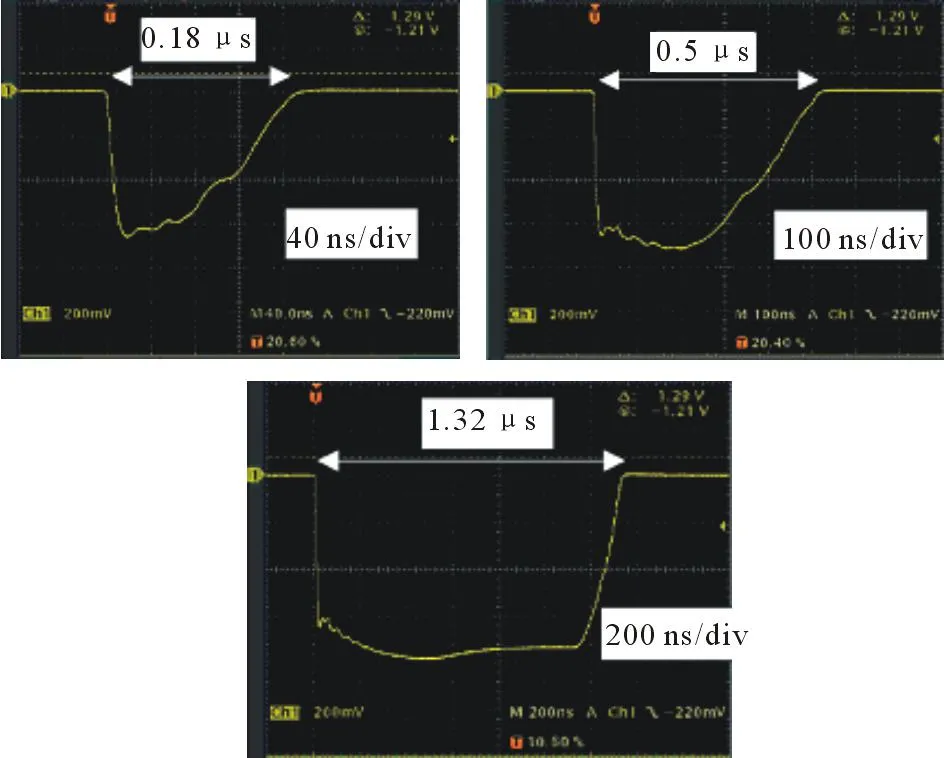
图8 发射脉冲输出波形
1.3射频控制单元的设计
射频控制单元是收发系统的重要组成部分,承担了大量的控制与检测功能,渗透到收发单元的每个设计细节,是雷达终端与收发系统的控制枢纽。本设计采用嵌入式可编程技术实现小型化,射频控制电路采用现场可编程门阵列(FPGA)与单片机(MCU)结合的设计方式,其工作框图如图9所示。

图9 射频控制单元工作框图
射频控制单元通过RS422串口与雷达上位机系统通讯,传输控制指令、参数设置和收发系统的各种状态、数据。将串口通讯的发送数据、接收数据经FPGA、MCU串行级联,在编程应用中有很大的灵活性,既可以通过FPGA的硬件编程实现通讯控制,也可通过MCU的软件编程实现通讯控制功能。FPGA与MCU通过地址总线和数据总线可相互共享各自的数据。如果通讯速率要求较高,数据传输量较大,建议采用FPGA设计实现。为简化设计,MCU的时钟由FPGA分频后提供。
对于实时性要求较高的STC检测与STC控制,采用快速并行模数转换器(ADC)和数模转换器(DAC)通过FPGA控制实现,而对于实时性要求不高的调谐指示、调谐电压设置,采用慢速串行ADC和DAC通过MCU控制实现,同时利用MCU自带的8路ADC检测各种电源电压、工作电流等模拟电平信号,将所有采样数据根据需要通过串口上传。FPGA还提供大量的I/O接口,实现诸如系统同步脉冲输入、各种故障状态检测,以及包括4路发射触发脉冲在内的各种收发单元控制。
为提高数字电路的抗干扰能力,对电路的电源和地线合理规划、布局,所有输入、输出的信号根据信号特性增加电磁兼容滤波措施,可有效抑制信号的传输串扰。
2结束语
本文论述的船用导航雷达借鉴国外成熟技术,实现了小型化、多功能的国产化设计,经实测发射单元采用12 kW的磁控管有效探测距离可达40 km,系统工作稳定、可靠,对于打破长期由国外产品垄断的国内船用导航雷达市场具有重要意义。
参考文献:
[1]何超.基于DSP的嵌入式数字船舶导航雷达信号处理系统的设计与实现[D].成都:电子科技大学,2007.
[2]席泽敏,夏惠诚.航海雷达目标检测[M].北京:电子工业出版社,2009.
[3]丁鹭肥,耿富录.雷达原理[M].3版.西安:西安电子科技大学出版社,2002.
[4]弋稳.雷达接收机技术[M].北京:电子工业出版社,2006.
[5]李永平,赵桂荣,赵月兰,等.嵌入式软件系统开发技术的研究[J].天津理工学院学报,2001,17(4):82-85.
[6]雷琴.数字化船载雷达——嵌入式系统软件设计[D].杭州:浙江大学,2003.
Design of Transmitting-receiving System for Shipboard Navigation Radar
WANG Qiang,ZHANG Fei
(East China Research Institute of Electronic Engineering,Hefei 230088,China)
Abstract:This paper introduces the design of a transmitting-receiving system of shipboard navigation radar,expatiates the operating theory and system composing of shipboard navigation radar,discusses the design method and operating theory of transmitting-receiving system,presents the circuit design of tuning control,sensitivity time control,radio frequency control unit.
Key words:navigation radar;transmitting-receiving system;sensitivity time control;tuning control
DOI:10.16426/j.cnki.jcdzdk.2016.01.013
中图分类号:TN957
文献标识码:B
文章编号:CN32-1413(2016)01-0062-04
收稿日期:2015-09-21
