基于DCS系统的三冲量汽包水位控制系统的设计
2016-04-26 06:12李长有河南理工大学河南焦作454174高冬霞河南理工大学中铝中州铝业有限公司河南焦作454174
自动化博览 2016年2期
关键词:MATLAB软件
李长有(河南理工大学,河南 焦作 454174)高冬霞(河南理工大学、中铝中州铝业有限公司,河南 焦作 454174)
Design of water level Control System of the Three Impetus about Steam drum based on DCS System
基于DCS系统的三冲量汽包水位控制系统的设计
李长有(河南理工大学,河南 焦作 454174)
高冬霞(河南理工大学、中铝中州铝业有限公司,河南 焦作 454174)
Design of water level Control System of the Three Impetus about Steam drum based on DCS System
摘要:中铝中州铝业有限公司热电厂7#锅炉采用霍尼韦尔PKS C400系统,通过对三冲量汽包水位研究设计出7#锅炉合适的汽包水位调节方式以及调节参数,并在以后新上锅炉系统中采用同样的设计方案完成汽包水位的调节。结合程序组态、画面显示等工作,最后用Matlab软件进行仿真,验证相关结论。
关键词:汽包水位;PKS系统;三冲量;Matlab软件
Abstract:The 7#boiler of Thermal power plant of Chalco Zhongzhou aluminum co.,LTD uses the PKS system.Based on the research about the 3-impulse water level about steam drum,the proper regulation mode and parameters are designed.In the future we are able touse the same design scheme to design the new boiler.By combining the application configuration and image display,we use the the Matlab software to simulate and verify related conclusion.
Key words:Steam drum water level; PKS system; 3-impulse; Matlab software
1 三冲量调节系统工作原理
汽包水位是锅炉稳定运行的重要参数之一。在稳定状态下,锅炉里面的水位在理想情况下应保持在一个恒值,但实际上不可能达到这种要求。一般控制汽包水位围绕设定值有小范围的波动,波动越小,越有利于锅炉的稳定运行。
三冲量控制实质上是前馈控制+串级控制的系统,通常反馈控制的控制作用是发生在出现偏差以后,而前馈控制的依据是干扰的变化,检测的信号是干扰量的大小,可以瞬间控制,不需要等到出现偏差以后。汽包液位是主变量,给水流量是副变量,蒸汽流量是干扰。把蒸汽流量信号作为前馈信号引入控制,能有效防止“虚假液位”的发生。这样,由于蒸汽流量和给水流量的引入反馈对扰动起到了超前响应的作用,使给水阀门一开始就向着正确的方向及时动作,从而减少了水位的波动幅度,消除了虚假水位的影响,缩短了响应时间。
1.1三冲量串级给水控制系统设计
根据三冲量串级调节系统原理设计的汽包水位三冲量串级控制系统原理的方框图如图1所示。从图中可以看出,3个冲量在系统中形成了2个闭合回路,即由给水流量变送器、内回路调节器PID、变频调节器、三台水泵电机组组成的内回路,其作用是消除给水压力波动等因素引起的给水流量的自发性扰动,以及当蒸汽负荷改变时迅速调节给水流量,以保证给水流量和蒸发量平衡,它是一个快速回路。

图1 汽包水位三冲量控制系统原理
由锅炉水位变送器、外回路调节器PID和内回路组成的外回路,其作用是校正水位偏差,使水位等于设定值。采用以蒸汽流量D为前馈信号的前馈控制,其作用是使给水量很快跟踪蒸汽流量的变化,克服虚假水位现象引起的变频器误动作和水位过大波动。内回路采用PID控制快速消除控制通道的给水扰动,起粗调作用,外回路采用预测PID控制用以克服蒸汽流量变化产生的扰动,起细调作用。
1.2汽包水位三冲量串级控制系统硬件构成
由于在蒸发量、给水量发生变化时,水位不能立即跟着作动态线性变化,尤其在蒸发量发生较大突变时,会发生虚假水位的现象。针对汽包水位对象的这一特点,经过综合考虑,为中铝中州铝业有限公司热电厂7#锅炉的250t/h蒸汽锅炉设计了基于DCS(霍尼韦尔PKS C400)系统的锅炉三冲量串级给水控制系统,该系统硬件构成如图2所示,主要由PKS控制器、变频器、各种传感器、各种调节阀、上位机部分等组成。
锅炉水位是用液位传感器进行检测,液位传感器开始将液位信号转化为静压信号,然后转化为标准电信号,即4~20mA的电流信号,最后在程序中通过程序组态来进行液位的显示和对液位的控制。
7#锅炉三个液位测量点量程都是-330mm到330mm,正常工作下,液位不会低于-150mm或者高于150mm,所以正常运行时汽包水位应在汽包0水位线的50mm上下范围波动。汽包水位太高会使蒸汽大量带水;水位太低可能使下降管带汽以至破坏水循环。随锅炉容量的增大,汽包的容积相对也愈来愈小,因而容许存水的变动量也就愈小。如果给水量与蒸发量不相适应,几分钟内就可能发生缺水或满水事故。可见汽包水位采用自动调节控制很重要,控制系统采用上位机(操作站)自动、手动控制和就地手操相结合的方式,来保证整个系统可靠地运行。上位机自动、手动控制时,能实时控制系统现场设备的生产过程。就地手操时,相应的设备从整个系统中独立出来,由操作人员在就地设备上进行操作。以上自动、手动和就地之间都是平滑无扰动的相互切换。

图2 三冲量串级控制系统硬件构成
2 三冲量串级给水控制系统应用
2.1设计方案及实施
整个启动锅炉控制系统分为数据采集和画面监控两部分,通过冗余FTE网络进行通讯,实现下位机与上位机数据的交换 。
采用霍尼韦尔公司的PKS系统的模拟量和数字量模块来采集现场数据(如温度、液位、压力等)和控制现场设备 ,操作站的监控画面采用PKS系统的Display builder监控软件以组态画面的形式实时显示生产过程的各种参数与报表、报警和历史查询信息,通过设置工艺和监控参数实时控制锅炉工作过程,其数据采集硬件结构如图3所示。
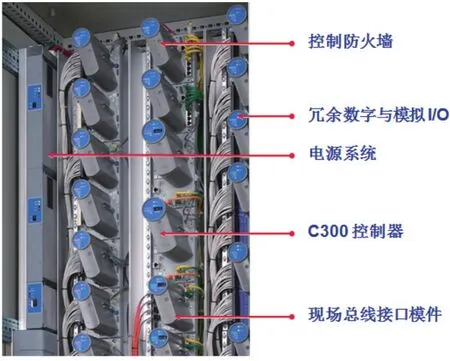
图3 PKS系统数据采集硬件构成
2.2组态逻辑控制及保护
串级加前馈三冲量给水控制是采用数字PID位置式闭环反馈系统,锅炉水位作为主参数,并引入蒸汽流量来修正虚假水位,同时引入给水流量来修正锅炉水位与蒸汽流量的计算误差。当锅炉水位处于某处位置时,控制给水调节阀至相应位置,从而控制锅炉的进水量,使锅炉水位在小范围内变化,实现连续给水,有助于提高蒸汽品质,减少水泵启停次数,延长水泵使用寿命。
(1)此次串级PID回路分为主控制回路和副控制回路,图4为给水主控制回路组态。主控制回路(G7LV001PID)用三取中的方法对三个水位进行选取,三个水位分别为G7LT0051、G7LT0052、G7LT0053,用signalsela块进行三取中的算法将输出的值作为PV值、蒸汽流量(G7FT004A)作为串级控制的量同时输入到PIDA功能块中进行PID控制,OP作为输出值去控制主给水调节阀。具体的设置参数Kp=50,Ki=5。

图4 给水主控制回路组态
图5所示为给水副控制回路组态。副控制回路(G7LV002PID)以主控制回路的给水阀开度作为设定值(SP),给水流量(G7FT002A)作为PID回路输入值PV,主控制回路(G7LV001PID)的OP值作为设定值SP,通过PIDA块进行PID调节,OP作为输出值去控制阀的开度。

图5 给水副控制回路组态
(2)MFT跳车联锁保护
图6所示为MFT联锁回路组态。在回路中,用NUMERICA块对汽包水位进行判断,当汽包水波动范围都在-200mm以下或者+200mm以上时,用逻辑块2003(相当于全部都不大于或小于)输出结果和联锁投入按钮相与,最后触发联锁进行跳车,引起锅炉灭火,保护锅炉安全。
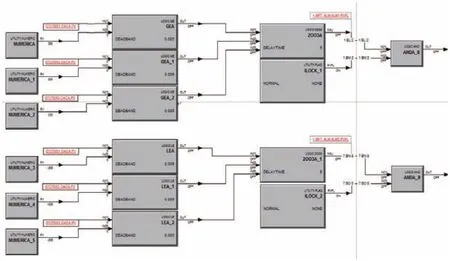
图6 MFT联锁回路组态
(3)手动回路保护
大旁路和小旁路回路的设置,是为了保证水位波动较大,自动控制无法进行调节的时候系统切到手动控制状态,即从“Auto”或者“CAS”状态切换为“MAN”状态,由人工调整给水阀的开度,保证水位的供给正常和锅炉的安全生产。图7为手动回路保护画面。

图7 手动回路保护画面
(4)结论
系统设计完成后的调控画面如图8所示。

图8 调控画面
3.3SIMULINK仿真

图9 串级三冲量仿真电路图
图9为串级三冲量仿真电路图。其中主控制回路PID里面的参数设置如图10(a)所示,Kp=50,Ki=5;副控制回路的参数,参数设置如图10(b)所示,Kp=200,Ki=10,Kd=5。
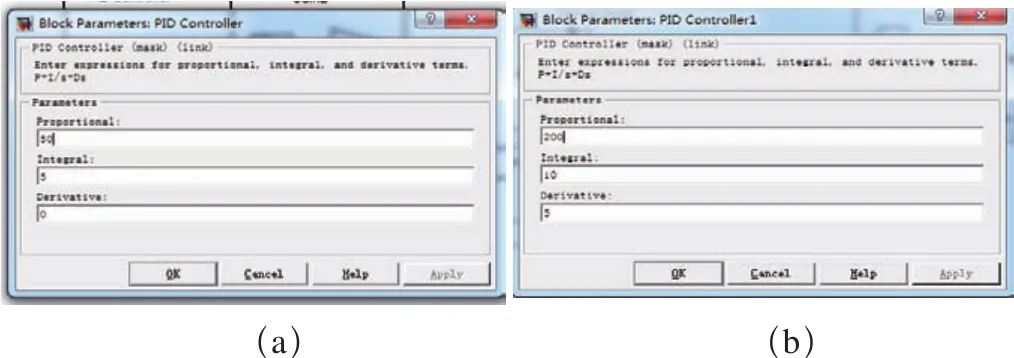
图10 主回路和副回路参数设定界面
不加串级PID控制的阶跃响应和加串级PID控制的阶跃响应对比如图11所示。
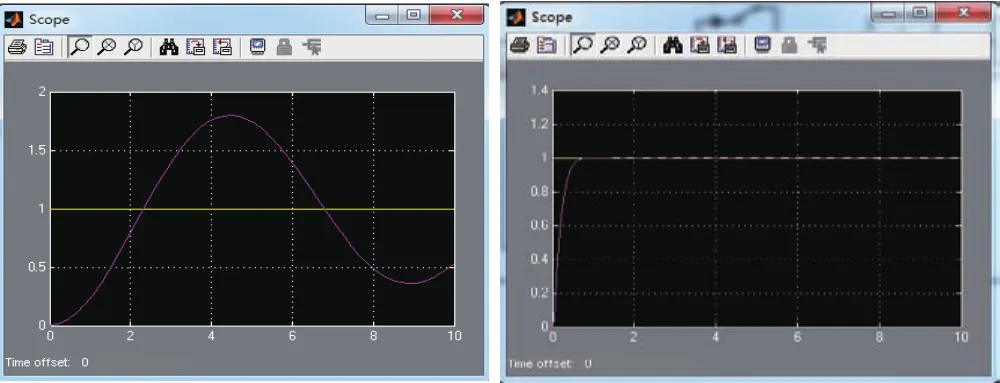
图11 主回路和副回路参数设定界面
3.4查看水位的趋势曲线可以看出实际效果
图12 水位趋势图
主回路是用于校正水位偏差的,副回路的作用则是快速消除内扰,前馈通路用于补偿外扰,克服虚假水位现象。在串级三冲量给水控制系统中给水流量扰动是内扰,串级三冲量给水控制系统中主调节器的任务是校正水位,这比单级三冲量给水控制系统的工作更为合理。
前馈控制是将扰动信号经前馈控制器处理后用以消除扰动对被调量的影响,它是按扰动进行的补偿控制,所以前馈控制又叫作“扰动补偿”。由自动控制原理知道,扰动补偿属于开环控制。前馈控制对系统的稳定性无影响,只要原系统是稳定的,施以前馈控制后,系统仍然稳定。前馈控制只能对于可以测量的扰动作用进行扰动补偿。前馈控制器的结构、参数取决于被控制对象与扰动通道的特性。
图12所示为水位趋势图,从仿真效果可知,串级三冲量给水控制系统对各种典型影响因素的干扰均能做出快速反应,具有较高的调节质量和调节精度,能够维持汽包水位的稳定,保障机组的安全稳定运行。
3 结语
7#锅炉控制系统通过实际运行检验,该控制系统能及时跟踪汽包水位的动态特性,改善其特定工况下的控制品质,保证系统的快速负荷响应以及汽包水位安全性。控制比较稳定,数据传输实时可靠,监控程序功能完善,预警功能突出,系统调试与维护方便,具有很强的实践推广价值。
参考文献:
[1]魏莉莉.工业锅炉DCS系统设计与控制方法研究[D].兰州:兰州理工大学,2011.
[2]张亮明.工业锅炉自动控制研究[J].系统仿真学报,1987,(11):9.
[3]林德杰.过程控制仪表及控制系统[M].北京:机械工业出版社,2008.
[4]李遵基.热工自动控制系统[M].西安:西安交通大学出版社,2002.
[5]K.J.ASTROM,K.EKLUND.A simplified non-linear model of a drum boiler-turbine unit[J].International Journal of Control,1972,16(1):145-169.
[6]Kwan H W,Anderson J H.Mathematics model of a 200MW boiler[J].Int.J.Control.1970,12(6).
[7]李杰.工业锅炉给水控制系统的研究[D].西安:长安大学,2008.
[8]Experion PKS中文参考手册[Z].
李长有(1964-),男,博士,教授,现就职于河南理工大学,主要研究方向为检测与控制技术。
高冬霞(1982-),女,河南商丘人,工程师,本科,现就职于河南焦作中铝中州铝业有限公司,从事自控工作。
作者简介
文献标识码:B
文章编号:1003-0492(2016)02-0086-04
中图分类号:TP273
猜你喜欢
数学学习与研究(2016年17期)2017-01-17
中国高新技术企业(2016年32期)2016-12-27
科技视界(2016年26期)2016-12-17
科技视界(2016年20期)2016-09-29
电脑知识与技术(2016年17期)2016-07-23
课程教育研究·学法教法研究(2016年9期)2016-06-21
电脑知识与技术(2016年7期)2016-05-19
科技视界(2016年4期)2016-02-22
教育教学论坛(2015年33期)2015-12-10
科技视界(2015年25期)2015-09-01