
多元信息传感的人体坐姿识别技术研究
2016-04-25 13:16刘欢吴其林朱治鹏邵宇吉张
中国科技博览 2016年2期
刘欢++吴其林++朱治鹏++邵宇吉++张正++李达欧
[摘 要]针对传统的人体坐姿识别精度低、二次穿戴麻烦等问题,我们提出了一种基于多元信息传感融合的人体坐姿识别方法,本文通过对加速度、压力等技术的整合,设计出新型算法,实现对人体坐姿的正确识别,同时与腰带结合,减小二次穿戴设备带来的麻烦。大量实验表明,该方法能够有效捕捉人体姿态数据。
[关键词]加速度;压力;信息融合;坐姿识别
中图分类号:TP391.41 文献标识码:A 文章编号:1009-914X(2016)02-0281-02
引言
随着当下新生活、新科技的发展,亚健康问题成为人们日益关注的焦点,尤其是对于长期的久坐白领办公人员,久坐现象更是严重,坐姿如果不正确,除了看起来没精神外,也容易腰酸背痛,甚至影响脊椎、压迫神经,因此如果不能保持一个正确的健康的坐姿,对我们的身体健康将产生很大的危害,进而对自身的思想压力和思想状态产生影响。人体坐姿的正确识别和矫正在人机工程学、康复医学等研究领域都扮演着十分重要的角色。随着加速度传感器、磁场传感器、压力传感器等先进技术的迅速发展,传感器模块的微型化、低成本化发展,使得传感器在低成本领域得到较为广泛的应用。目前,已经有许多学者对该问题进行研究,REHBINDE.H等人利用陀螺仪和加速度传感器进行信息融合,从而修正陀螺仪的在水平倾角上的偏差,L1W等人在静态环境下,利用体域网系统采集多组加速度信号,提出一种基于DS证据理论的数据融合算法,对人体常见的四种基本姿势进行识别,可以静态识别人体姿态,但是无法动态跟踪姿态。
针对前人的研究基础,以及传统的对人体坐姿的单个识别部位的监测的不稳定、精度低以及二次穿戴问题,我们提出了一种基于多元信息传感与腰带融合的人体坐姿识别矫正算法,利用加速度传感器,压力原理,实现与腰带的结合,解决二次穿戴问题,可以有效获得人体的姿态值,从而全方位监测人体的姿态。
1 人体姿态描述和求解原理
1.1 利用加速度技术
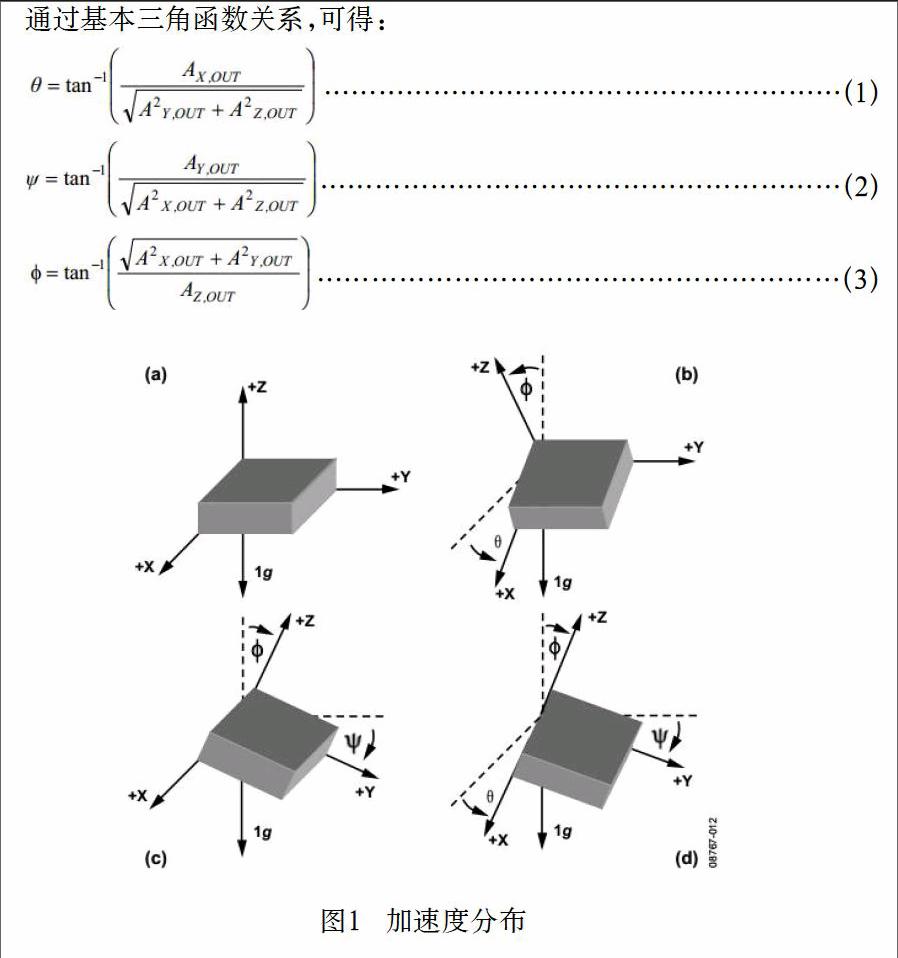
人体姿态是指人体坐标系相对参考坐标系的相对转动。为了便于研究,我们将人体腰部附近部位视为一个小方块,只研究小方块的变化角度,在这里我们取三个角度来研究,分别是偏航角、俯仰角和横滚角,取方块上坐标轴x、y、z。根据三角原理,x轴上的重力矢量投影会产生等于加速度计x轴与水平夹角正弦值的输出加速度,同理也可得到y轴的输出加速度。同时,可以基于一个参照点分别确定加速度计各个轴的角度。参照点为器件的方块的典型取向,其中,x轴和y轴位于水平面内(0g场),z轴与水平线垂直(1g场)。如下图所示,θ为水平线与加速度计x轴的夹角,ψ为水平线与加速度计y轴的夹角,?为重力矢量与z轴的夹角。[1]
通过基本三角函数关系,可得:
由于上述实验采用的分析基于以下假设,即采用的是理想加速度计。这就是相当于0g失调且具有完美灵敏度的方块。尽管传感器已经经过调整,但是最后这样的原理将应用到与压力,实现对人体姿态的检测,所以,在系统组装后,方块上的任何静态应力都可能影响失调和灵敏度。所以,需要进行这样的矫正。
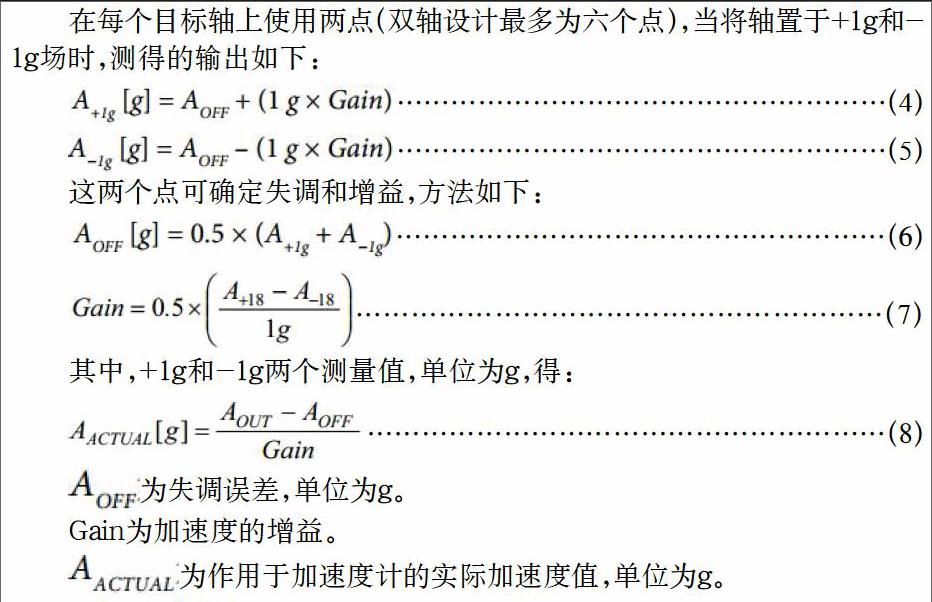
在每个目标轴上使用两点(双轴设计最多为六个点),当将轴置于+1g和-1g场时,测得的输出如下:
为失调误差,单位为g。
Gain为加速度的增益。
为作用于加速度计的实际加速度值,单位为g。
1.2 压力原理
经过实验发现,人体在不同的坐姿下会直接影响腰带部位对周边的压力分布,坐姿的不同会造成压力分布的较大差异。在这里需要用到一款传感器,即:原装进口 FSR402 电阻式薄膜压力传感器。
Force?Sensing?Resistor是著名Interlink?Electronics?公司生产的一款重量轻,体积小,感测精度高,超薄型电阻式压力传感器。这款压力传感器是将施加在FSR传感器薄膜区域的压力转换成电阻值的变化,从而获得压力信息。压力越大,电阻越低。其允许用在压力100g-10kg的场合。
1.3 姿态识别方法
通过大量的实验,采集到人体腰部位置对腰带的压力分布主要分布在左前、左后、右前、右后几个位置,我们在选择左前监测点1、左后监测点3、右前监测点2,作为压力传感器检测位置。同时,由于加速度传感器检测的是人体相对于外界的俯仰角、横滚角的变化,所以将压力传感器放在腰带头部位置较为合适。在腰带上设置监测点,将FSR402 电阻式薄膜压力传感器放在监测点位置,即可根据人体坐姿的变化,对监测点引起压力改变,传感器接收数据,将数据传送到MCU,对数据进行分析处理,通过与加速度传感元件结合,即可判别人体坐姿。通过加速度传感器与压力传感器同时检测、识别,综合判断人体的姿态。
2 信号预处理
受环境和各方面的因素影响,特别是在检测人体姿态时,由人体机械振动带来的干扰,所以为了减少测量数据带来的干扰,我们需要对传感数据值进行预处理。其中,滑动均值滤波作为传统的数字滤波器相对简单,对除去随机噪声有很大的效果。本研究也就是采用滑动均值滤波对信息进行去噪处理。滤波原理公式如下:
其中,x(i)为传感器采集到的数据,y(i)为滤波后的数据。然后进行实验记录。
3 识别姿态算法
当角度值θ在θ1-θ2范围内且压力差值a在(ΔF -σ,ΔF+σ)范围内,压力差值b在(ΔF`-α,ΔF`+α)范围内时,坐姿处在正确状态;
当角度值大于θ2且a不在ΔF+-σ内、b大于ΔF`+α时,坐姿处于左前倾状态;
当角度值在θ1-θ2范围内且a不在(ΔF -σ,ΔF+σ)内、b大于ΔF`+α时,坐姿处于左倾状态;
当角度值小于θ1且a不在(ΔF -σ,ΔF+σ)内、b大于ΔF`+α时,坐姿处于左后仰状态;
当角度值大于θ2且a不在(ΔF -σ,ΔF+σ)内、b在(ΔF`-α,ΔF`+α)范围内时,坐姿处于前倾状态;
当角度值大于θ2且a不在(ΔF -σ,ΔF+σ)内、b小于ΔF`-α时,坐姿处于右前倾状态;
当角度值小于θ1且a不在(ΔF -σ,ΔF+σ)内、b在(ΔF`-α,ΔF`+α)范围内时,坐姿处于后仰状态;
当角度值在θ1-θ2范围内且a不在(ΔF -σ,ΔF+σ)内、b小于ΔF`-α时,坐姿处于右倾状态;
当角度值小于θ1且a不在(ΔF -σ,ΔF+σ)内、b小于ΔF`-α时,坐姿处于右后仰状态。
4 结论
本研究通过运用多种传感器,实现了传感器识别坐姿与腰带的结合。首先将传感器固定在腰带相应的部位,将采集到的数据通过滑动滤波进行去噪处理,降低因测量噪声、机械振动等对人体姿态识别产生的影响。然后,通过将俯仰角、横滚角和压力值进行综合判断,实现对人体坐姿态的有效识别。试验结果表明,基于多传感器技术与腰带的融合,能够较好的抵抗人体运动过程中随机噪声的干扰,能够有效地识别人体的坐姿,实现了长时间稳定地输出较高精度的姿态数据。
参考文献
[1] Christopher J. Fisher.利用加速度计进行倾斜检测.ANALOG DEVICES
[2] TomoakiTusuzki.ADXL345快速入门指南.ANALOG DEVICES
[3] 田国会,吉艳青,黄彬.基于多特征融合的人体动作识别[J].山东大学学报:工学报,2009
[4] 张春慧.高精度捷联式惯性导航系统算法研究[D].哈尔滨:哈尔滨工程大学,2005.
猜你喜欢
当代水产(2022年6期)2022-06-29
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
中国新通信(2016年21期)2017-01-06
现代电子技术(2016年22期)2016-12-26
亚太教育(2016年35期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
求知导刊(2016年30期)2016-12-03
考试周刊(2016年86期)2016-11-11