
改进的PID控制算法及MATLAB仿真分析
2016-04-24 09:05高淑芝张萌柴梓晴
河南科技 2016年17期
高淑芝张 萌柴梓晴
(1.沈阳化工大学信息工程学院,辽宁 沈阳 110142;2.北京理工大学计算机学院,北京 100081)
改进的PID控制算法及MATLAB仿真分析
高淑芝1张 萌1柴梓晴2
(1.沈阳化工大学信息工程学院,辽宁 沈阳 110142;2.北京理工大学计算机学院,北京 100081)
PID控制器具有可靠性高、鲁棒性好、结构简单、易于实现等优点。基于此,介绍PID控制技术的发展和研究进程,提出一种自整定参数的专家模糊PID控制算法。结果显示,此方法在调节时间、稳定性和抑制超调量方面都要优于一般的抗积分饱和控制法。
PID控制;模糊PID;控制算法
PID控制器以结构简单、可靠性高、稳定性强、调整方便,被作为主要的工业控制技术之一[1]。然而,因为此方法具有非线性、时不变确定性,在实际生产过程中不容易建立精确的数学模型。因此,应用常规PID控制器不易达到理想控制效果。
本文介绍了传统PID控制算法,在课本学习基础上改进传统算法,并提出关于模糊参数的自整定方法。此方法要求确定对象模型,并且通过实践将得到的知识模型化,最后通过推理将参数进行最优调整。
1 数字PID控制算法
数字PID控制器应用于计算机控制系统中,此方法一般分PID位置型控制算法和PID增量型控制算法。
1.1 PID位置型控制算法
计算机控制系统是由采样时刻的偏差值来计算控制量的,必须将积分和微分项离散化处理。依照模拟PID控制算法公式,将采样时刻点作为连续时间t,将和式作为积分,将增量作为微分,得到近似变换,再经简化得到离散PID表达式:

1.2 PID增量型控制算法
如果控制量中增量被执行机构所需要,由式(1)推导PID增量型控制公式:

再将式(1)减去式(2)后,可得:

而PID增量型控制因为积分阶段的大效应导致静态误差的存在等一些缺点,因此在选择时需慎重。
1.3 改进PID控制算法
由于传统的PID控制算法存在许多不足,因此,需要运用其他算法与传统的PID控制方法相结合的方法,使传统PID控制器得到改进。
1.3.1 不完全微分控制算法。PID控制算法的微分作用比较灵敏,使系统振荡,调节能力下降。若想改变这种现象,需要将传统PID控制算法中加入低通滤波器在整个PID控制器之后,得到不完全微分PID控制算法,从而改进系统性能。
对于不完全微分结构,其传递函数为:

将式(4)离散化,并进行最终整理得到:

式(5)中,Ts为采样时间,ks为比例系数,TI为积分时间常数,TD为微分时间常数,Tf为滤波器系数。
仿真结果表明:在引入不完全微分之后,解决了传统PID控制算法的不足,由于其控制特性优于传统PID控制算法,因此被广泛应用于工业中。
1.3.2 微分先行控制算法。微分先行控制特点为:只需将输出量进行微分,所以给定值变化时输出量不变,然而被控量变通常比较缓和。当给定值有频繁变化时,运用微分先行控制算法就可以避免给定值频繁变化导致的系统不稳定,改善系统的动态性能。
1.4 模糊PID控制算法研究
模糊控制是运用模糊语言变量、模糊集合论及模糊推理作为基础的一种计算机智能控制方法,构成模糊控制器的是微机或单片机,应用计算机程序来完成大多数功能。
1.4.1 模糊推理系统机构。模糊PID控制系统是在传统的PID控制的基础上,将反馈值与目标值间的误差以及误差变化率作为系统的输入,运用模糊推理法对PID的参数在线自整定,满足不同反馈值与目标值间的误差和误差变化率对控制器参数的不同要求,从而使被控对象具有良好的静态及动态特性。
1.4.2 PID参数在线整定规则。PID参数的整定规则如下:①当|e|较大的情况下,应选择较小的kD,ki=0和较大的kp,这样使得系统的跟踪性能强,而且由于将积分作用进行了限制,因此避免了较大超调的出现;②当|e|中等大小的情况下,应选择较小的kp,以降低响应超调量。注意kD值的选择对系统响应影响作用很大,ki值的选取也要适当;③当|e|较小的情况下,kp和ki都要选择较大值,这样可以使系统的稳定性有所提高,此时遵循|ec|的大小选择kD的值,当|ec|较大的情况下,kD应选择较小值,当|ec|较小的情况下,避免系统发生振荡,应选择较大的kD值。
2 改进模糊PID算法的MATLAB仿真
2.1 改进模糊PID控制算法研究
本文运用2个输入(e、ec)、3个输出(kp、ki、kd)的形式来设计模糊PID控制器,其中模糊集均为{负大,负中,负小,零,正小,正中,正大},简记为{NB,NM,NS,ZO,PS,PM,PB},模糊集上论域为系统误差e以及误差变化率ec的变化范围,[-3,-2,-1,0,1,2,3]是(e、ec)的论域,[-6,-4,-2,0,2,4,6]是(kp、ki、kd)的论域,通过专业人士的技术和实践经验,建立合适的模糊规则表[2]。
建立kp、ki、kd的模糊规则表后,进行kp、ki、kd的自适应校正,正态分布下e、ec和kp、ki、kd均服从,可得到各模糊自己的隶属度,通过模糊合成推理从而设计出PID参数模糊矩阵表。
2.2 MATLAB仿真
设被控对象:

采样时间是0.5ms,将模糊PID控制进行阶跃响应,在第420个采样时间(0.2s)时控制器输出上加2.5的干扰,仿真结果如图1所示。
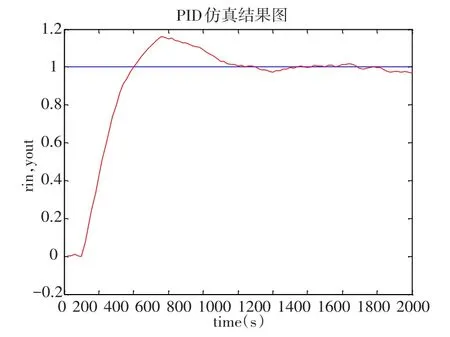
图1 模糊PID控制阶跃响应曲线
根据仿真结果可以看出,采用模糊控制PID的算法,调节时间更快,能够迅速地达到稳定时间。在工业用途上大大地满足了各类精度及稳定性能方面控制的需求。
3 结论
本文提出一种自整定参数专家模糊PID控制方法,并进行仿真分析。结果表明,这种改进的PID控制算法在抑制超调量、调节时间、稳定性方面优于传统PID控制算法。
[1]刘金锟.先进PID控制MATLAB仿真[M].2版.北京:电子工业出版社,2006.
[2]郑阿奇.MATLAB实用教程[M].北京:电子工业出版社,2004.
Improved PID Control Algorithm and MATLAB Simulation Analysis
Gao Shuzhi1Zhang Meng1Chai Ziqing2
(1.School of Information Engineering,Shenyang University of Chemical Engineering,Shenyang Liaoning 110142;2.School of Computing,Beijing Institute of Technology,Beijing 100081)
PID controller has the advantages of high reliability,simple structure,easy implementation and so on. Based on this,the development of PID control technology and research process were introduced,a self-tuning param⁃eter fuzzy PID control algorithm was proposed,the results showed that this method is superior to the general anti windup control method in the aspects of adjusting time,stability and restraining overshoot.
PID control;fuzzy PID;control algorithm
TP18
A
1003-5168(2016)09-0034-02
2016-08-21
高淑芝(1968-),女,博士,教授,研究方向:化工过程建模与智能控制。
猜你喜欢
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年2期)2021-06-09
成都信息工程大学学报(2021年6期)2021-02-12
数学年刊A辑(中文版)(2021年4期)2021-02-12
纺织科学研究(2020年1期)2020-05-21
数学物理学报(2019年5期)2019-11-29
制造技术与机床(2017年6期)2018-01-19
人民音乐(2016年3期)2016-11-07
重庆工商大学学报(自然科学版)(2015年3期)2015-05-25
体育科学研究(2015年5期)2015-02-28
