
船舶交通服务模拟器中实时预警功能的实现
2016-04-22 01:56:27唐皇神和龙孙霄峰尹勇
山东交通学院学报 2016年1期
关键词:仿真
唐皇,神和龙,孙霄峰,尹勇
(大连海事大学航海动态仿真和控制实验室,辽宁大连 116026)
船舶交通服务模拟器中实时预警功能的实现
唐皇,神和龙,孙霄峰,尹勇
(大连海事大学航海动态仿真和控制实验室,辽宁大连116026)
摘要:为在船舶交通服务模拟器中实现对港口监控的模拟,提高船舶交通服务操作员的培训效率,对真实的船舶交通服务中心进行仿真,采用计算船舶间最近会遇距离及最近会遇时间的方式建立数学模型,基于船舶自动识别系统(Automatic Identification System,AIS)数据源进行数据处理,运用VC++编程语言完成系统开发。港口监控中对辖区水域船舶的危险实现了实时预警。利用天津港真实AIS数据对系统功能进行测试,测试结果表明,该系统能够准确识别辖区水域船舶的会遇态势及遇险情况。
关键词:VTS模拟器;港口监控;仿真;VC++
目前,国内的船舶交通服务(Vessel Traffic Service,VTS)操作员培训大多采用真实设备,其优点是能向受培训者提供真实的VTS系统环境,使受培训者感受到真实的VTS操作过程。但其缺点也同样明显,真实的VTS系统投资较大,一般教学单位难以接受,同时,这种基于真实的VTS系统的操作员现场培训,还会影响VTS系统的正常管理[1]。因此,迫切需要研制出既能为VTS操作员培训提供环境真实感,又不影响真实VTS系统的正常工作的全任务VTS模拟器。
VTS中港口监控的功能主要是对辖区水域中船舶行为的跟踪监控及船舶危险的实时预警。目前,国内外学者在船舶危险预警方面进行了很多研究。文献[2-6]分别运用最近会遇距离(Distance to doscst point of approach,DCPA)和最近会遇时间(Time to doscst point of approach,TCPA)加权、神经网络、模糊理论等方法研究碰撞危险度;文献[7-11]基于航迹跟踪、复杂度建模等方法对船舶预警进行研究。考虑到算法的可行性及计算复杂度,本文采用计算DCPA、TCPA的方法进行实时预警。
国外已经研制出了功能完备的VTS模拟器,典型代表有挪威的Congsberg[12]及英国的Transas[13]。在国内,文献[14-18]对VTS模拟器也做过一些基础研究。然而仅有上海吴淞VTS中心和浙江海事局建立了VTS模拟培训中心,其他绝大部分VTS中心都没有配备全任务VTS模拟器培训系统[19]。为了打破国外在VTS模拟器技术上的垄断,研制出一套符合国际公约要求、具有自主知识产权的全任务VTS模拟器设备迫在眉睫。因此,大连海事大学航海动态仿真和控制实验室拟在实验室现有航海模拟器的研究基础上开发全任务VTS模拟器,本文中讨论的预警功能实现为该VTS模拟器的子模块。
1全任务VTS模拟器系统架构
全任务VTS模拟器是在模拟真实VTS系统的基础上,融入船桥操作系统,旨在提高VTS操作员培训效率,并打破国外产品在该领域的垄断。具体系统架构如图1所示。
全任务VTS模拟器系统主要由5部分构成,分别是教练员站、数据服务器、VTS操作员培训端、船舶操纵模拟终端、交通流统计及模拟。本文的研究内容主要是完成VTS操作员培训端的功能实现,实现对VTS港口监控的模拟。

图1 全任务VTS模拟器系统架构
2预警功能实现流程
2.1实时预警功能结构
作为全任务VTS模拟器的子模块,该预警功能承担了VTS模拟器学员端的仿真任务,主要负责为VTS操作员培训提供可视化界面。同时集成了数据接收、数据处理及信息显示功能。该实时预警功能结构如图2所示。

图2 实时预警功能结构图
功能实现主要由5个模块构成,分别是数据接收模块、船舶信息显示模块、电子海图模块、报警提示模块、信息处理模块。采用VC++编程,利用MFC强大的兼容性,将电子海图显示模块作为控件插入,在提高系统运行效率的同时,使程序结构更加简洁。通过对相关预警算法的研究,建立船舶间预警算法模型,实现准确地实时报警功能。
2.2数据处理流程
通过对数据的接收及处理,系统实现了船舶信息的集中显示、船舶报警信息提示及处理功能。具体数据处理流程如图3所示。系统功能主要由数据接收、数据处理和结果显示及处理3部分组成。
1)数据接收
进入系统后,可以直接访问数据库,根据需要查询获取数据,也可以由VTS模拟器系统中的服务器定时向本模块发送数据。接收到的数据主要是AIS数据,包括船舶的静态数据和动态数据。在接收数据的同时,还需要对数据进行清洗,即去除其中错误的数据。将清洗后的正确数据存盘,进入数据处理阶段。
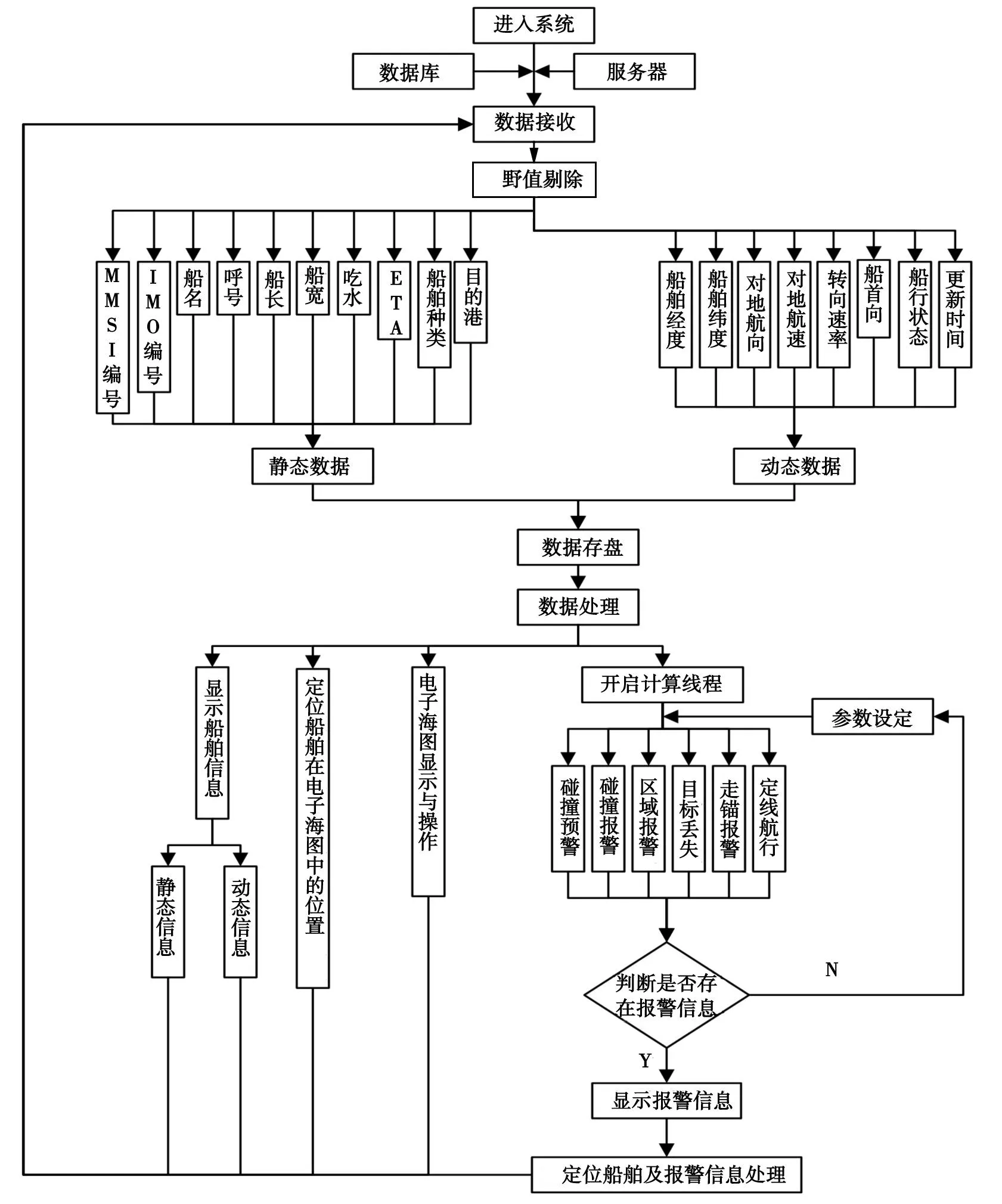
图3 数据处理流程图
2)数据处理
存盘后的数据主要用于3个方面:①船舶信息显示模块,将提取出的信息直接显示在船舶列表中,如图4所示。由于船舶的MMSI(Maritime Mobile Service Identity)编号具有唯一性,故将MMSI编号作为船舶列表查询的主键。②电子海图显示模块,电子海图的功能主要是将数据可视化,用三角符号表示船舶所在位置,并配备海图缩放等操作菜单。③报警计算,分别是碰撞预警、碰撞报警、区域报警、目标丢失、走锚报警和定线航行,判断是否存在报警情况,如果存在则加入报警提示。
3)结果显示及处理
对数据处理阶段产生的报警信息进行报警提示,在弹出的对话框中可以看到相关报警信息,并根据不同的报警情况弹出不同的对话框。双击船舶列表中的船舶信息,可以在电子海图中定位到该船舶所在位置。报警信息经处理后,该条报警会被取消显示。结果显示及处理如图5所示。
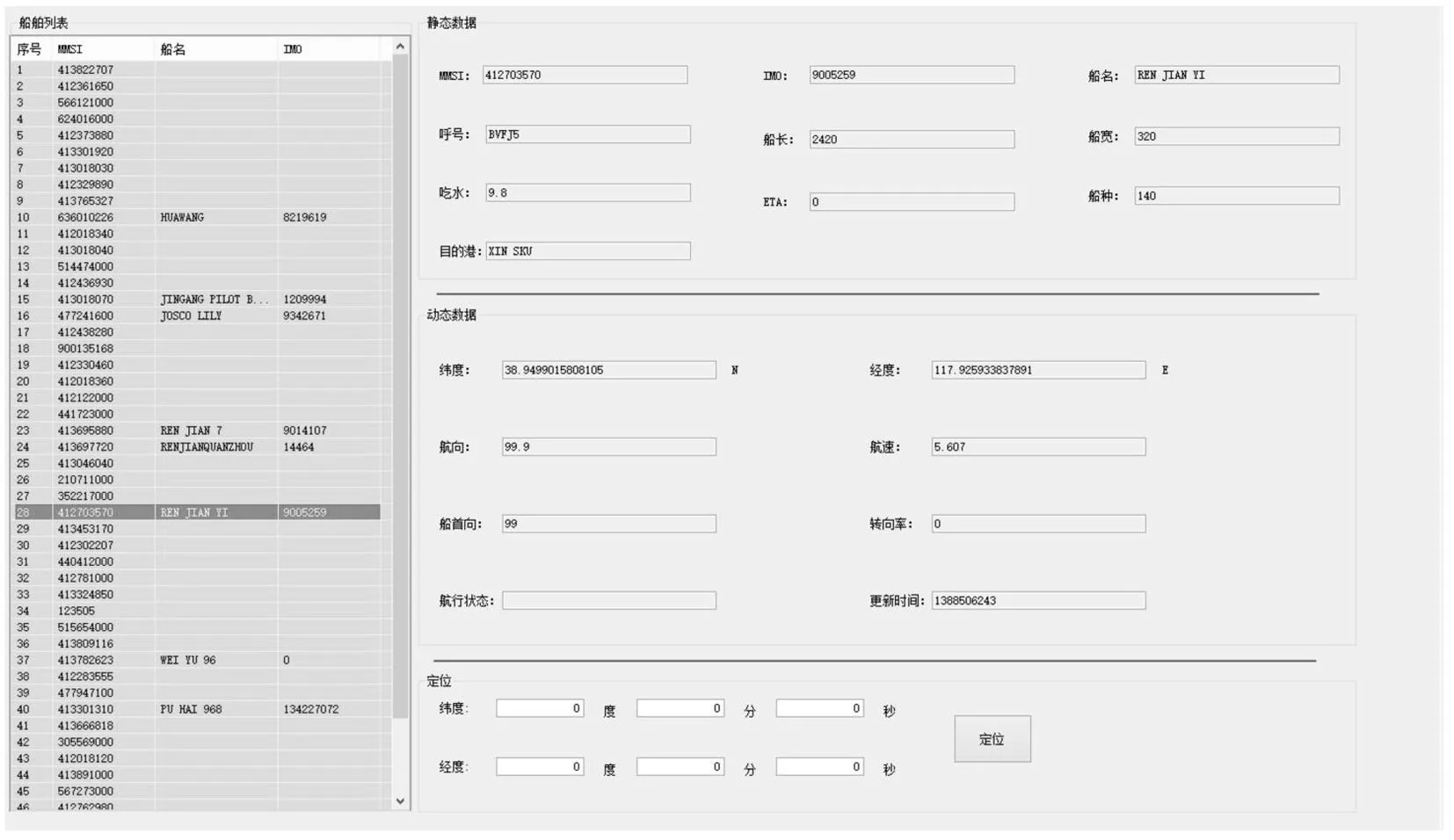
图4 船舶信息显示界面

图5 电子海图显示与操作界面
3预警功能实现的关键技术
本功能实现的关键技术主要包括报警算法模型建立及电子海图的显示与操作。
3.1报警算法模型
为了提高程序运行效率,采用多线程编程,建立一个独立线程用于报警算法的实时计算。
1)碰撞预警。提取出每艘船舶的AIS数据,计算每艘船舶与其他船舶间的DCPA及TCPA。将所得DCPA及TCPA与设定的DCPA、TCPA阈值进行比较,如果满足条件,则将该报警信息加入报警显示列表。此方法可以人为设置DCPA及TCPA阈值,比较灵活。
2)碰撞报警。监测船舶间是否发生碰撞。采用船舶碰撞预警计算的相同算法,当两艘船的DCPA为0时,则认为该两艘船舶已经发生碰撞,将船舶信息加入报警显示列表。
3)区域报警。需要事先设定监控区域,提取船舶位置信息进行区域检测。当有船舶进入到监控区域构成的多边形中,则产生报警信息,将该船舶信息加入报警显示列表。此方法涉及到数据与电子海图间的交互,由于电子海图采用控件插入方式,需要通过自定义消息完成数据与电子海图显示的交互,见图6。
4)目标丢失。当数据存盘后,会产生一个船舶列表,记录该列表中所有船舶的MMSI编号。当程序定时更新时,即接收到新的数据,则会产生一个新的船舶列表,通过比较这两个列表中的船舶MMSI编号,可以提取出缺失的船舶信息,并返回该船舶的MMSI编号。在电子海图中将该船舶标记为丢失,如图7所示。
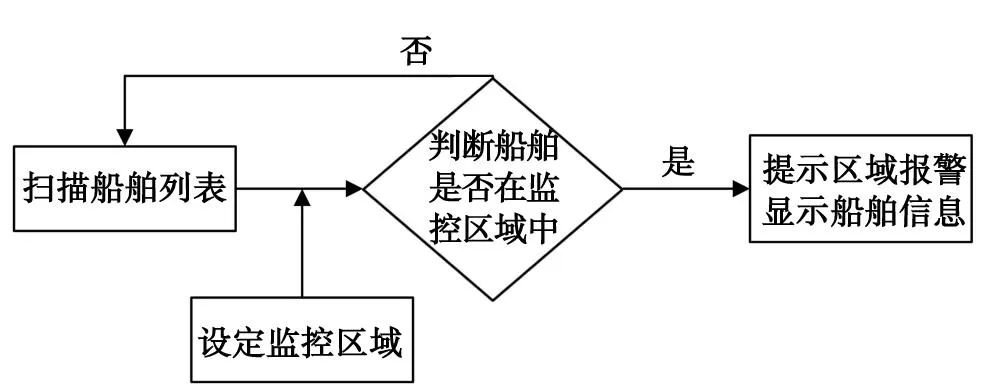
图6 区域报警模型

图7 目标丢失报警模型
5)走锚报警。在接收到的数据中,可以提取出船舶的航行状态。筛选出航行状态为锚泊的船舶,并记录该船舶船位,在下一个系统更新时刻,计算出该船舶船位的变化量,如果超过设定的阈值,则发出走锚报警,如图8所示。
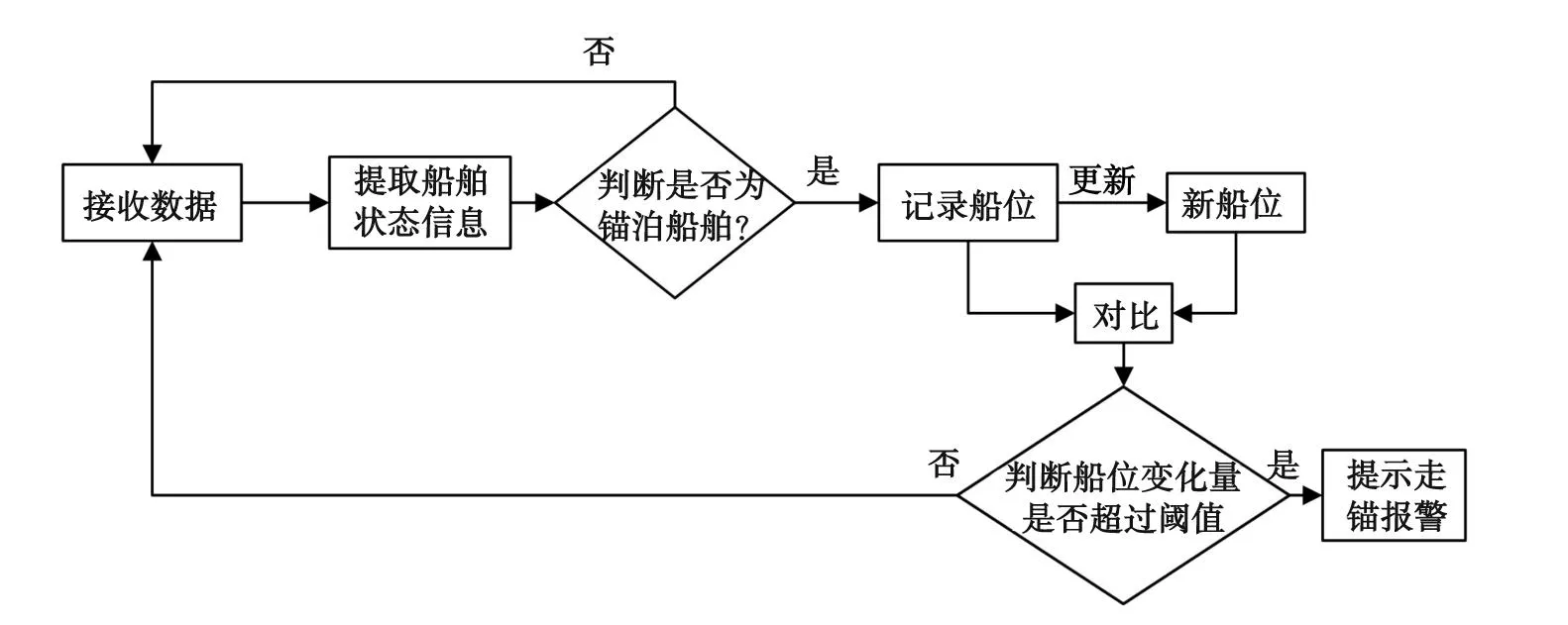
图8 走锚报警模型
6)定线航行。需要提前设定监控区域,并设定船舶在该区域内遵守的规则,如船舶的最大航速、最小航速、最大偏航角及最大横移距离等。如果有船舶在此区域内违反规则,则会发出报警提示,见图9。

图9 定线航行报警模型
3.2电子海图显示与操作
为了解决传统电子海图计算复杂、显示效率低等问题,本系统利用插入控件的方式,将电子海图嵌入系统中,该控件来源于大连海事大学航海动态仿真实验室。此方法可以大幅提高电子海图显示效率,使程序更加简洁、高效。
4平台测试结果
为了验证预警功能模块的准确性和实用性,采用天津港真实AIS数据进行测试,测试结果如图10、11所示。

图10 碰撞预警信息提示

图11 区域报警信息提示
通过测试结果可以看出,本系统平台可以实现准确的港口监控预警功能,系统界面美观,简捷易用。
5结语
本文通过对全任务VTS模拟器操作员培训端的设计与实现,完成了VTS港口监控的模拟。此功能模块实现的交互式操作员培训,既能给受训人员提供环境真实感,又不影响真实VTS系统的正常工作。该模拟器系统的研发不仅可以有效提高VTS操作员培训效果,还可以作为真实VTS系统中预警算法的测试平台。
参考文献:
[1]李蕊.VTS模拟系统的研究[D].大连:大连海事大学,2003.
[2]KEARON J. Computer programs for collision avoidance and traffic keeping[C]//Proceedings of Conference on Mathematical Aspects on Marine Traffic. London:Academic Press,1977:37-43.
[3]IMAZU H, KOYAMA T. Determination of times of collision avoidance[J].The Journal of Japan Institute of Navigation, 1984, 70(2):30-37.
[4]蔡烽,刘光明.基于人工神经网络的船舶碰撞危险度计算[J].海军大连舰艇学院学报,1998,21(2):17-19.
[5]INAISHI M. Building method and application of neural network system for navigation[C]//Lateral Symposium of Sino-Japanese Navigation Institute. Japan:Navigation:日本航海学会誌,1993:39-46.
[6]郑中义.船舶自动避碰决策系统的研究[D].大连:大连海事大学,2000.
[7]MAIER H R. Neural networks for the prediction and forecasting of water resources variables: a review of modeling issues and applications[J].Environment Modeling and Softwares,2000,15(1):101-124.
[8]DOSSO S E. Bayesian acoustic source track prediction in an uncertain ocean environment[J].Oceanic Engineering,2010,35(4):811-820.
[9]徐婷婷.基于BP神经网络的船舶航迹实时预测[J].大连海事大学学报,2012,38(1):9-11.
[10]文元桥,黄亚敏.水上交通流结构复杂度建模[J].中国航海,2014,37(2):62-68.
[11]杨君兰.交汇水域船舶冲突概率计算模型研究[J].武汉理工大学学报,2013,35(2):78-82.
[12]KONGSBERG.VTS-vessel traffic servicessimulator[EB/OL].[2015-09-05].http://www.km.kongsberg.com.
[13]TRANSAS.VTS simulator[EB/OL].[2015-09-05].http://www.transas.com.
[14]李蕊,闫秋娜,韩凤.VTS模拟培训系统[J].世界海运,2005,28(3):53-54.
[15]刘德振.VTS信息模拟器中船舶运动模型的研究[D].大连:大连海事大学,2010.
[16]刘敏.VTS模拟器中雷达跟踪模型检验系统[D].大连:大连海事大学,2011.
[17]李晓松.VTS模拟器中交通流模型的研究[D].大连:大连海事大学,2012.
[18]王胜正,张英英,黄玉贵,等.VTS与船舶操纵综合模拟器构建关键技术[J].上海海事大学学报,2014,35(2):1-5.
[19]石世云,王胜正.我国开展VTS模拟器培训的现状及前景[J].航海技术,2015(1):61-63.
(责任编辑:郎伟锋)
Realization of Real-Time and Early-Warning Function in Vessel Traffic Service Simulator
TANGHuang,SHENHelong,SUNXiaofeng,YINYong
(LaboratoryofMarineSimulationandControl,DalianMaritimeUniversity,Dalian116026,China)
Abstract:In order to achieve the simulation of port monitor in vessel traffic service(VTS) simulator and improve the training efficiency of VTS operators, the simulation of the VTS center was developed by using the mathematical model to calculate the distance and time of the closest point of approach. Automatic identification system data and the VC++ programming technology were also used in the system development. The function of real-time early-warning for the ships in jurisdiction waters was realized. System test was carried out by using the real data of Tianjin Port, with satisfactory results. The system can accurately identify approaching vessels and dangerous conditions in the covered waters.
Key words:VTS simulator; port monitor; simulation; VC++
中图分类号:U666.158
文献标志码:A
文章编号:1672-0032(2016)01-0074-07
DOI:10.3969/j.issn.1672-0032.2016.01.014
作者简介:唐皇(1991—),男,重庆合川人,硕士研究生,主要研究方向为交通信息工程及控制,E-mail:475891172@qq.com.
基金项目:国家863项目(2015AA016404)
收稿日期:2015-11-20
猜你喜欢
中国教育技术装备(2016年20期)2016-12-12 10:09:15
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技资讯(2016年18期)2016-11-15 20:09:22
科技资讯(2016年18期)2016-11-15 07:55:28
价值工程(2016年29期)2016-11-14 02:01:16
电子技术与软件工程(2016年18期)2016-11-14 00:46:54
数字技术与应用(2016年9期)2016-11-09 23:25:33
数字技术与应用(2016年9期)2016-11-09 22:09:07
科技视界(2016年18期)2016-11-03 21:44:44
科技视界(2016年18期)2016-11-03 20:31:49
