基于改进引导滤波的实时红外图像去噪研究
2016-04-22 09:04罗正华袁海粟
成都大学学报(自然科学版) 2016年1期
罗正华, 孟 源, 袁海粟
(1.成都大学 信息科学与工程学院, 四川 成都 610106; 2.电信科学技术第五研究所, 四川 成都 610062)
基于改进引导滤波的实时红外图像去噪研究
罗正华1, 孟源1, 袁海粟2
(1.成都大学 信息科学与工程学院, 四川 成都610106; 2.电信科学技术第五研究所, 四川 成都610062)
摘要:针对红外图像对比度低、边沿模糊、图像噪声明显以及去噪算法复杂度普遍高的缺点,提出应用于红外图像去噪的改进的引导滤波算法,并与传统的引导滤波去噪算法进行对比,以验证该算法提高图像质量的能力与算法处理的效率.该方法利用Sobel滤波代替传统引导滤波求统计特征的方法来获取图像特征,在保证去噪效果的前提下,极大简化了算法复杂度,并移植该算法至TMS320C6748DSP平台进行测试.实验结果表明,程序经优化后,达到实时处理的要求.
关键词:红外图像;实时处理;引导滤波;Sobel滤波;TMS320C6748DSP
0引言
红外图像的实质是用像素的灰度值来反映温度的幅值,利用红外探测器采集的红外图像内容主要是以背景为主,在背景区域内,各物体之间的温度差很小,在采集的图像上表现为对比度低、边沿模糊以及环境信息不易被人眼所识别[1].为提高红外图像质量,必需采用红外图像增强方法,但提高图像对比度的同时也放大了图像噪声.因此,图像去噪是红外图像处理中必不可少的环节[2-3].为进一步提高红外图像质量,学者们提出了各种图像去噪方法[4-8].上述方法都具有较好的去噪效果,但是,这些算法的提出均只考虑去噪效果,并没有提到算法的实时实现性.在此基础上,本研究分析了引导滤波算法[2],并在保持其去噪能力的前提下,提出了一种改进的引导滤波设计,本算法具有更低的算法复杂度.
1引导滤波去噪
引导滤波是一种局部线性模型,属于自适应线性滤波的一种[2,8].引导滤波利用引导图像与输入图像的统计特征,为中心像素邻域内的像素权值分配做导向,根据得出的权值求出中心像素的值.输入图像本身也能作为引导图像.将图像本身作为引导图像的引导滤波,一般用做边缘保持的模糊操作,此方式可用于红外图像去噪[9],而且在图像边缘处有较好的表现.
引导滤波算法对引导图像与输出图像之间提出了如下线性模型的假设,即输出图像是引导图像的线性变换,
qi=ak×Ii+bk,∀i∈ωk
(1)
式中,ak和bk是滤波窗口wk的线性系数,滤波窗口的半径为r.
由假设模型可以得出,
Δq=ak×ΔI
(2)
式中,Δ表示像素与临近像素之间的变化量.由式(2)可知,输出图像与引导图像之间为线性关系,且输出图像的处于边缘特征的像素幅值由线性系数ak决定,因此,式(1)的假设使引导滤波具有边缘保持的效果.
为了确定线性系数ak和bk,引导滤波算法将噪声模型确定为加性噪声模型,
qi=pi-ni
(3)
式中,q为输出图像,p为输入图像,n为噪声分量.
图1为引导滤波算法原理图.根据图1,结合式

图1引导滤波原理示意图
(1)和(3),在保持线性模型的前提下,可以得出噪声能量为,

(4)
式中,ε是ak的正规划参数.
要实现图像去噪,必需E(ak,bk)尽量小.为此,需要根据输入图像p和引导图像I来确定合适的ak与bk,

(5)

(6)

由于像素i与所有覆盖i的滤波窗口相关,当用不同的窗口计算时,窗口所覆盖的输入图像像素值pi的值是不相同的.在滤波窗口中,采用对所有重叠i的滤波窗口的值求平均,即,

(7)
(8)
对线性系数ak与bk分别求平均,输出图像变化量q与引导图像变化量I之间已经不再是线性关系.在线性系数与经过了均值模糊后,输出图像变化量q为,
Δq≈ak×ΔI
(9)
此意味着,引导图像I中的边缘特征处的像素值的幅度变化可以大部分被输出图像q保存.
为将引导滤波应用于红外图像去噪,本研究选定输入图像p等于引导图像I,此时有,

(10)
bk=(1-ak)×μk
(11)
2改进的引导滤波
2.1算法改进思路
本研究根据引导滤波的算法原理对算法进行改进,避免原算法极高的算法复杂度,在保证算法的效果的前提下,使算法易于在DSP上实现,并且达到实时处理的要求.
对引导滤波算法进行分析发现,算法主要的运算量来源于对线性系数a与b的确定.根据引导滤波算法原理,输出图像的像素值由线性系数a、b和引导图像的像素值得出.其中,a值的值域为[0,1],取值决定引导图像的比例;b值的值域为[0,255],取值决定图像平滑的比例;参数a是关于邻域内像素方差的增函数.当在平滑区域,滤波窗口内像素值的方差很小,因此,a值相对很小,b值相对很大,像素输出主要由此滤波窗口平滑后的值决定.相反,当在图像边缘特征明显的区域,输出值主要由引导图像决定.所以,图像滤波之后达到在平滑区域噪声的去除及边缘区域的边缘保持.据此,改进的引导滤波算法步骤如下:
1)对输入图像进行3×3的中值滤波的预处理,减小椒盐噪声产生的伪边沿,
medianI=fmedian(I)
(12)
式中,fmedian为对图像进行中值滤波.
2)对预处理后的图像进行Sobel滤波与均值滤波,确定a值,
sobelI=fsobel(medianI)
(13)
a=fmean(sobelI)
(14)
式中,fmean为对图像进行均值滤波,fsobel为对图像进行Sobel滤波.
3)对输入图像进行均值滤波,并得出b值,
meanI=fmean(I)
(15)
b=(255×meanI-a×meanI)≫8
(16)
式中,fmean为对图像进行均值滤波.
4)得出去噪图像,
q=a×I+b
(17)
2.2算法改进后的去噪结果
图2为原始的含噪图像,图3与图4分别为使用引导滤波算法和改进的引导滤波算法得出的去噪图像.
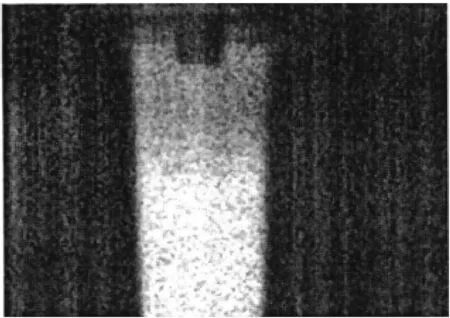
图2含噪的红外图像
由图3与图4对比可知,2种滤波都具有较好的边缘保持效果,而且引导滤波算法的去噪性能在视觉上更优.但是,由于引导滤波是基于对窗口的统计特征决定对噪声的去除程度,而改进的引导滤波算法是利用Sobel滤波确定突出的图像边缘特征,Sobel算子是基于像素的, 因此,距离突出的图像边

图3引导滤波算法去噪后的图像

图4改进的引导滤波算法去噪后的图像
缘特征滤波窗口半径的区域内,引导滤波算法处理后的图像噪声保留较多,而改进的引导滤波去噪效果更优.通过上述分析可知,改进的引导滤波算法的算法复杂度低且具备较好的去噪能力,能满足对红外图像实时处理的要求.
3实验与分析
3.1算法优化
红外图像预处理模块输入的红外图像为320×256分辨率的单通道图像,占用存储空间为80KB.
由改进的引导滤波去噪算法的实现流程可知,计算去噪结果图像的数据需要中值滤波预处理后的图像数据、均值滤波后的图像数据和Sobel滤波后的图像数据,并根据3幅图像数据得出去噪输出.在存储资源的分配上,由于内部存储空间有限,将图像数据以4B对齐的方式存储在DDR外部存储器,并且将内部L2的256K全部配置成Cache.
存储资源的开辟与Cache的配置的代码为:
#pragma DATA-ALIGN(Gray,4);
unsigned char Gray[81920];
#pragma DATA-ALIGN(MEDIANGREYimage,4);
unsigned char MEDIANGREYimage[81920];
#pragma DATA-ALIGN(BLURGREYimage,4);
unsigned char BLURGREYimage[81920];
#pragma DATA-ALIGN(SOBELimage,4);
unsigned char SOBELimage[81920];
//使能缓存L1及L2
CacheEnableMAR((unsigned int)0xC0001000,(unsigned int)0x08000000);
CacheEnable(L1DCFG-L1DMODE-32K|L1PCFG-L1PMODE-32K|L2CFG-L2MODE-256K);
在程序的优化上,中值滤波、Sobel滤波和均值滤波均调用TI的图像处理库.函数调用程序如下,
//中值滤波
for (j=0;j IMG-median-3x3-8( & Gray [WIDTH*j],WIDTH, & MEDIANGREYimage [WIDTH*j]); } //Sobel滤波 IMG-sobel-3x3-8 (MEDIANGREYimage,SOBELimage,WIDTH, HEIGHT); //5x5均值滤波 for (j=0;j IMG-conv-5x5-i8-c8s ( & Gray [WIDTH*j], & BLURGREYimage [WIDTH*j],WIDTH-4,pitch,mask-ptr shift); } 在获得去噪图像的最后一步计算中,一次读取并处理4 B,可明显提高算法效率,其关键代码如下: for(i=0;i temp4=-sub4(*temp2++,*temp1++); *ltemp=-mpysu4ll(temp4,*temp3++);temp4=(temp [1]≪24) & & (temp[3]≪16) & & (temp[5]≪8) & & temp[7]; *result++=-add4(temp4,*temp1); } 3.2实验分析 在测试中,将移植改进的引导滤波算法至TI的TMS320C6748DSP评估板,并在评估板上对320×256分辨率的单通道红外图像进行图像去噪,测试结果如图5所示. 图5红外图像去噪算法测试结果 实验结果显示,程序经优化后,对于单幅图片,改进的引导滤波算法在DSP平台的运行耗时为14 ms,帧率为71 frame/s,达到实时性的要求,且图像去噪效果与PC的仿真结果一致. 4结论 本研究利用引导滤波进行红外图像去噪,针对传统的引导滤波高复杂度的缺点,利用Sobel滤波代替求统计特征的方法来获取图像特征,极大降低了算法复杂度,并且将改进后的算法移植至TMS320C6748DSP平台.实验测试结果表明,程序经优化后,算法运行达到了实时性的要求,在对有实时性要求的场合,此算法具有一定的实际应用价值. 参考文献: [1]于雷.红外图像预处理算法研究及硬件实现[D].南京:南京理工大学,2010. [2]He Kaiming,Sun Jian.Tang Xiaoou.GuidedImageFiltering[C]//11thEuropeanConferenceonComputerVision(ECCV2010).Crete,Greece:Springer,2010. [3]王峰.图像引导滤波器在单幅图像复原中的应用[D].合肥:合肥工业大学,2012. [4]王峰.红外图像预处理算法研究与实现[D].长春:长春理工大学,2012. [5]Texas Instruments Incorporated.TMS320C6748Fixed-andFloating-PointDSP[EB/OL].[2014-3-21].http://www.ti.com/lit/ds/symlink/tms320c6748.pdf. [6]李凯.基于TMS320C6748高速DSP信号处理模块设计[D].哈尔滨:哈尔滨工程大学,2007. [7]郭强,张斌.基于DMA的DSP-Cache优化[J].电气电子教学学报,2013,42(9):2299-2304. [8]李娜,高弘霞,刘胜文.地面景物红外可见光图像差异性研究[C]//第九届全国光电技术学术交流会论文集(下册).天津:中国宇航学会光电技术专业委员会,2010. [9]汪安民,周慧,蔡湘平.TMS320C674XDSP应用开发[M].北京:北京航空航天大学出版社,2011. Real-time Infrared Image Denoising Based on Improved Guided Filter LUOZhenghua1,MENGYuan1,YUANHaisu2 (1.School of Information Science and Engineering, Chengdu University, Chengdu 610106, China;2.The Fifth Research Institute of Telecommunication Technology, Chengdu 610062, China) Abstract:Due to the low contrast,blurred edge and insufficient image noise of infrared images,and the highly complex denoising algorithms,the paper proposes an improved guided filter algorithm applied in infrared image denoising.Compared with the traditional guided filter denoising algorithm,the paper validates the ability and the efficiency of this algorithm to improve the quality of the image.The method adopts Sobel filter instead of the traditional guided filter for the statistical characteristics of the image to obtain the image features so as to greatly simplify the complexity of the algorithm while assuring the denoising effects.The algorithm is transplanted to the TMS320C6748DSP platform for testing.After optimization,the algorithm meets the requirements of real-time processing. Key words:infrared image;real-time processing;guided filter;Sobel filter;TMS320C6748DSP 中图分类号:TP391.41;TN911.73 文献标志码:A 作者简介:罗正华(1966 — ), 男, 硕士, 高级工程师, 从事计算机通信与信息系统研究. 基金项目:国家自然科学基金(61173121)资助项目. 收稿日期:2015-12-27. 文章编号:1004-5422(2016)01-0049-04 猜你喜欢
数学物理学报(2022年4期)2022-08-22中学生数理化·高一版(2021年2期)2021-03-19智富时代(2019年4期)2019-06-01智富时代(2019年4期)2019-06-01中国惯性技术学报(2019年6期)2019-03-04中央民族大学学报(自然科学版)(2018年3期)2018-11-09中央民族大学学报(自然科学版)(2017年2期)2017-06-11火控雷达技术(2016年3期)2016-02-06遥测遥控(2015年2期)2015-04-23浙江理工大学学报(自然科学版)(2015年10期)2015-03-01
猜你喜欢
数学物理学报(2022年4期)2022-08-22中学生数理化·高一版(2021年2期)2021-03-19智富时代(2019年4期)2019-06-01智富时代(2019年4期)2019-06-01中国惯性技术学报(2019年6期)2019-03-04中央民族大学学报(自然科学版)(2018年3期)2018-11-09中央民族大学学报(自然科学版)(2017年2期)2017-06-11火控雷达技术(2016年3期)2016-02-06遥测遥控(2015年2期)2015-04-23浙江理工大学学报(自然科学版)(2015年10期)2015-03-01